TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025084403
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023198286
出願日
2023-11-22
発明の名称
パレットおよび積載システム
出願人
新東工業株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
B65D
19/31 20060101AFI20250527BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】パレットが傾いた場合、荷崩れを抑止することができるパレットを提供する。
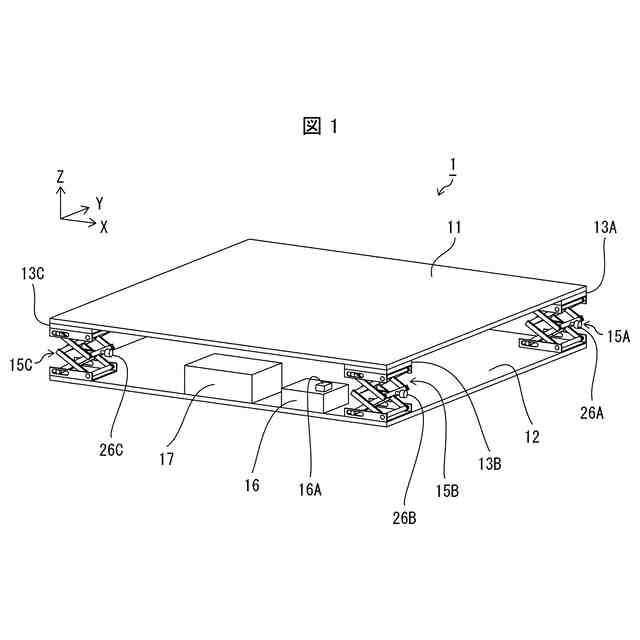
【解決手段】パレット(1)は、荷物を載置する上板(11)と、上板(11)に対向して配置される下フレーム(12)と、上板(11)の下面、または、下フレーム(12)の上面に配置された少なくとも3つの力覚センサ(13A~13D)と、力覚センサ(13A~13D)を介して、上板(11)と下フレーム(12)との間に配置され、上板を下フレームに対して昇降可能な少なくとも3つの昇降機構(15A~15D)と、少なくとも3つの力覚センサ(13A~13D)の出力信号に基づいて、少なくとも3つの昇降機構(15A~15D)を駆動制御するコントローラ(16)と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
荷物を載置する上板と、
前記上板に対向して配置される下フレームと、
前記上板の下面、または、前記下フレームの上面に配置された少なくとも3つの力覚センサと、
前記力覚センサを介して、前記上板と前記下フレームとの間に配置され、前記上板を前記下フレームに対して昇降可能な少なくとも3つの昇降機構と、
少なくとも3つの前記力覚センサの出力信号に基づいて、少なくとも3つの前記昇降機構を駆動制御するコントローラと、
を備えた、パレット。
続きを表示(約 580 文字)
【請求項2】
前記コントローラは、少なくとも3つの前記力覚センサの、前記上板が水平なときの出力信号と、少なくとも3つの前記力覚センサの、現在の出力信号とに基づいて、前記上板が水平に近づくように、少なくとも3つの前記昇降機構を駆動制御する、
請求項1に記載のパレット。
【請求項3】
請求項1または請求項2に記載のパレットと、
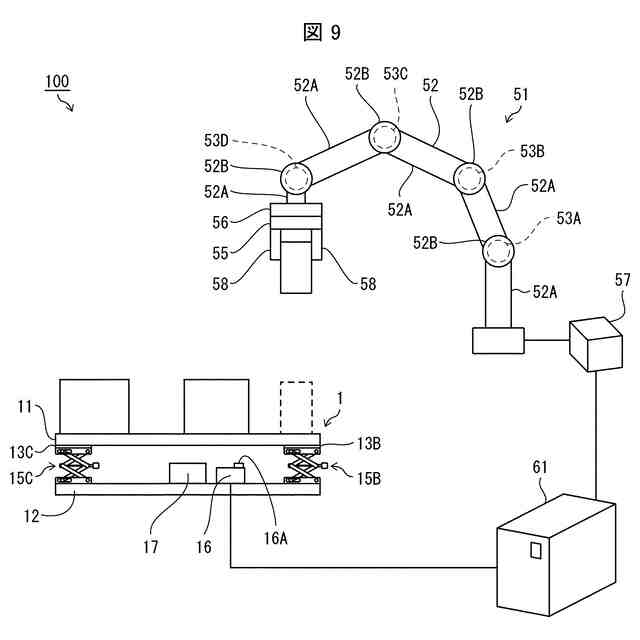
ロボットハンドがハンド用力覚センサを介してロボットアームの先端部に取り付けられたロボットと、
前記ロボットが前記パレットの前記上板に荷物を積載するように制御する積載制御装置と、
を備え、
前記積載制御装置は、
前記ハンド用力覚センサの出力信号と、少なくとも3つの前記力覚センサまたは前記コントローラの出力信号と、に基づいて、前記ロボットハンドの把持した前記荷物の前記上板への設置位置を設定する設定部を有し、
前記設定部が設定した前記上板の前記設置位置に前記ロボットハンドの把持した前記荷物を設置するように前記ロボットを制御する、積載システム。
【請求項4】
前記設定部は、機械学習により生成された学習済みモデルを用いて、前記ロボットハンドが把持した前記荷物の前記上板への設置位置を設定する、
請求項3に記載の積載システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、パレットおよび積載システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、フォークリフトの前方へ延びるフォークを挿入するための挿入穴が貫通して設けられ、挿入穴の入口付近に運転者が認識できる目印が形成されたフォークリフト用パレットが記載されている。
【先行技術文献】
【特許文献】
【0003】
実用新案登録第3232641号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
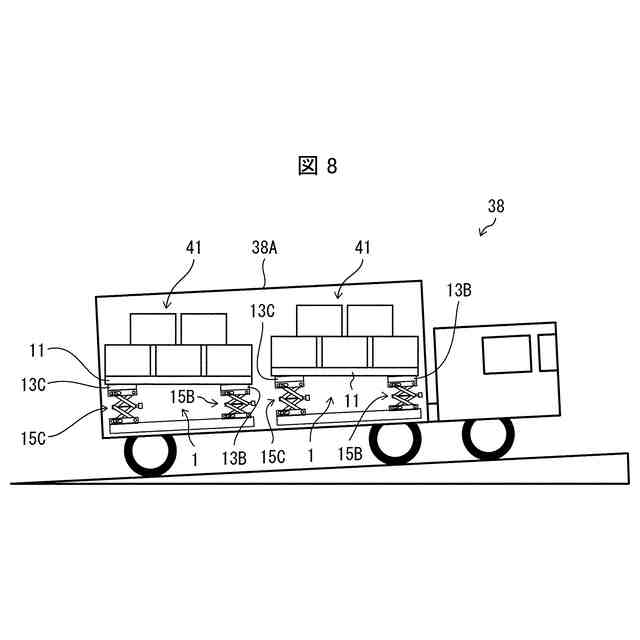
このようなフォークリフト用パレットへ荷物を積み込む時、荷物の重量やパレット全体の重心を考慮しないと、パレット全体の重心が偏るおそれがある。その結果、フォークリフトなどでの搬送時に、荷崩れを引き起こすおそれがある。また、パレットを搭載したトラックなどの車両が坂道を走行する際に、荷台が傾き、荷崩れを引き起こすおそれがある。
【0005】
本発明の一態様は、上述した課題に鑑みてなされたものであり、パレットが傾いた場合、荷崩れを抑止することができるパレットおよび積載システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本発明の一態様に係るパレットでは、荷物を載置する上板と、前記上板に対向して配置される下フレームと、前記上板の下面、または、前記下フレームの上面に配置された少なくとも3つの力覚センサと、前記力覚センサを介して、前記上板と前記下フレームとの間に配置され、前記上板を前記下フレームに対して昇降可能な少なくとも3つの昇降機構と、少なくとも3つの前記力覚センサの出力信号に基づいて、少なくとも3つの前記昇降機構を駆動制御するコントローラと、を備える。
【発明の効果】
【0007】
本発明の一態様によれば、上板に荷物が載置されたパレットが傾いた場合、コントローラは、少なくとも3つの力覚センサの出力信号に基づいて、少なくとも3つの昇降機構を駆動制御して、上板を水平状態に近づけることができる。その結果、コントローラは、パレットが傾いた場合、荷崩れを抑止することができる。
【図面の簡単な説明】
【0008】
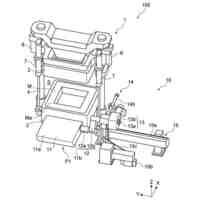
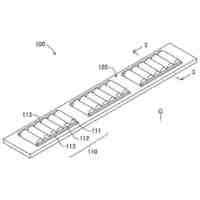
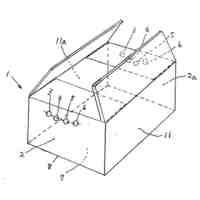
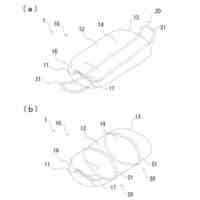
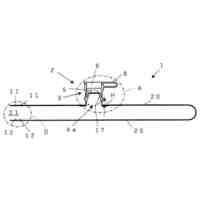
実施形態1に係るパレットの概略構成の一例を示す斜視図である。
実施形態1に係るパレットの概略構成の一例を示す平面図である。
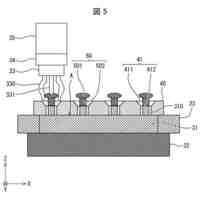
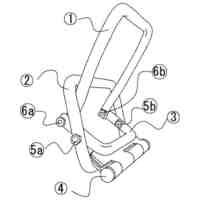
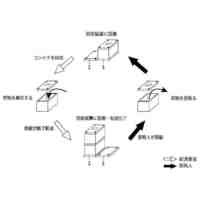
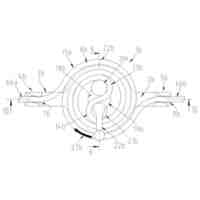
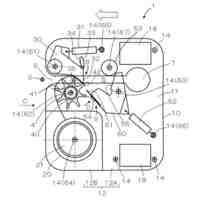
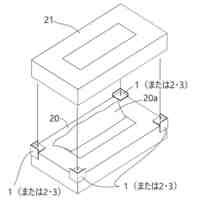
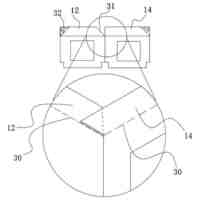
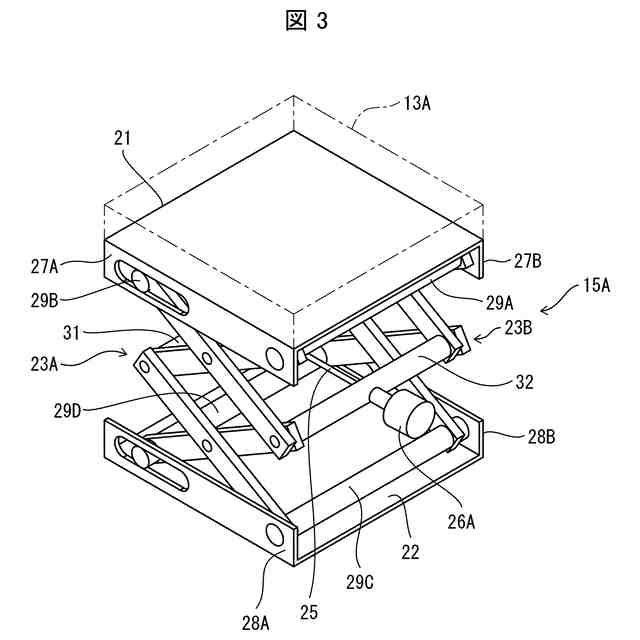
昇降機構の一例を示す斜視図である。
実施形態1に係るパレットの電気的構成の一例を示すブロック図である。
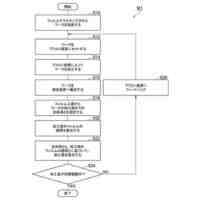
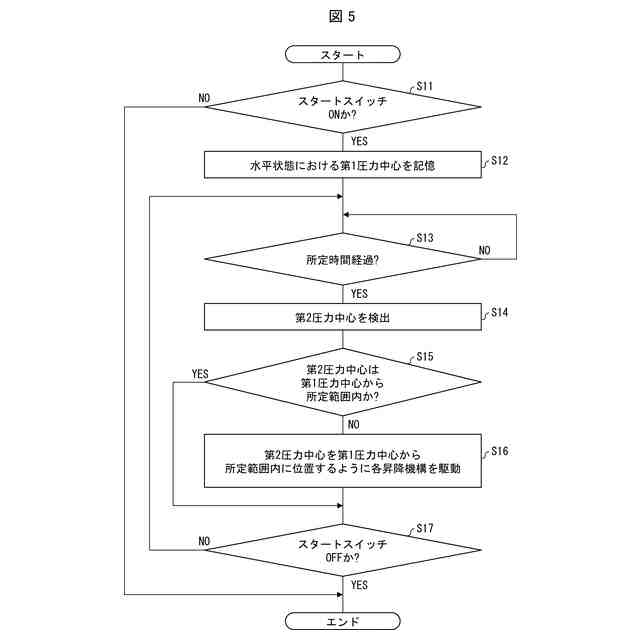
コントローラが実行する上板昇降制御処理の一例を示すフローチャートである。
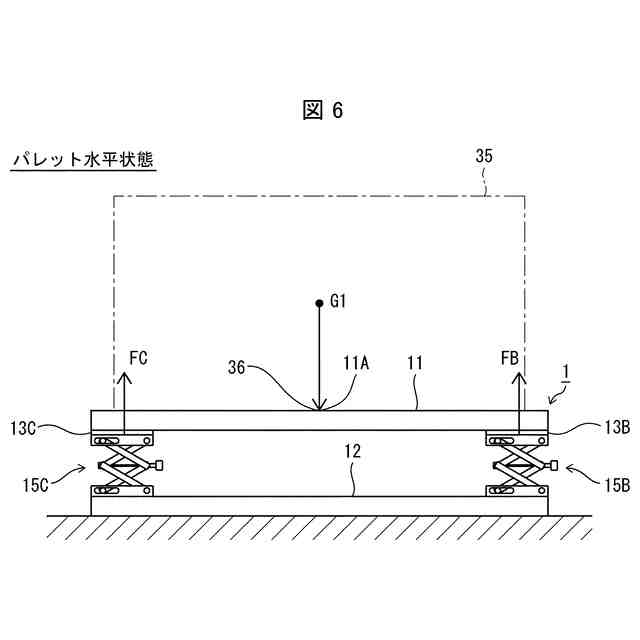
パレットが水平状態のときの圧力中心の一例を示す正面図である。
パレットが傾いたときの圧力中心の一例を示す正面図である。
トラックの荷台に載せたパレットの動作の一例を模式的に示す図である。
実施形態2に係る積載システムの概略構成を説明する説明図である。
実施形態2に係る積載システムの電気的構成の一例を示すブロック図である。
実施形態2に係る積載制御装置が実行する積載制御処理の一例を示すフローチャートである。
実施形態2に係るロボットコントローラが実行する力覚センサ出力処理の一例を示すフローチャートである。
実施形態2に係るパレットのコントローラが実行する圧力中心出力処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明を具体化した実施形態1および実施形態2について、図面を参照して詳細に説明する。各図面に示される同一又は同等の構成要素、部材には、同一の符号を付すものとし、適宜重複した説明は省略する。
【0010】
[実施形態1]
[パレット1の概略構成]
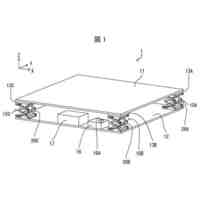
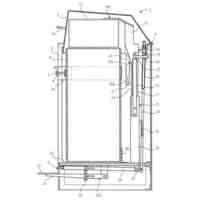
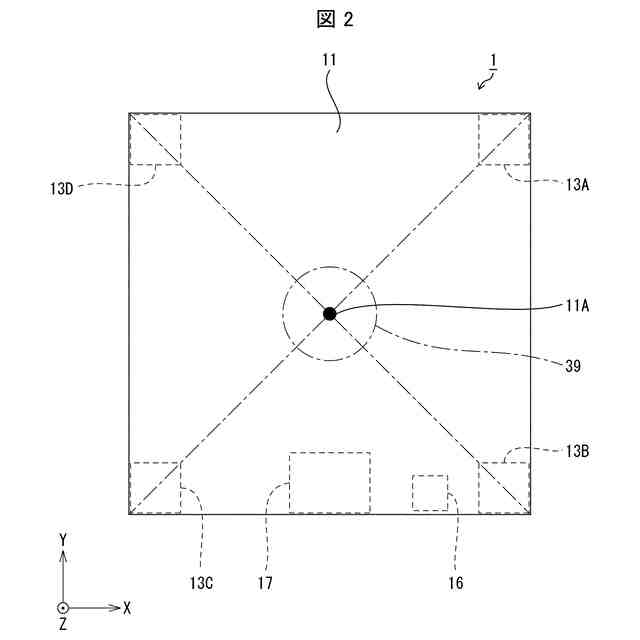
先ず、本開示の実施形態1に係るパレット1の概略構成について図1および図2に基づいて説明する。図1は、実施形態1に係るパレット1の概略構成の一例を示す斜視図である。図2は、実施形態1に係るパレット1の概略構成の一例を示す平面図である。図1および図2に示すように、パレット1は、上板11と、下フレーム12と、4つの力覚センサ13A~13Dと、4つの昇降機構15A~15Dと、コントローラ16と、バッテリ17と、を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
新東工業株式会社
粉体供給装置
2か月前
新東工業株式会社
中子セット装置
2か月前
新東工業株式会社
パレットおよび積載システム
3か月前
新東工業株式会社
ワークの加工方法、及び測定システム
14日前
新東工業株式会社
ブラシ研磨装置、及びウエハ保持装置の製造方法
2か月前
新東工業株式会社
ピックアップ方法、ピックアップ装置およびピックアップシステム
2か月前
新東工業株式会社
インテンシティ測定装置、インテンシティ測定システム、及び、インテンシティ測定方法
3か月前
個人
箱
11か月前
個人
ゴミ箱
10か月前
個人
収容箱
1か月前
個人
包装体
11か月前
個人
コンベア
3か月前
個人
容器
7か月前
個人
段ボール箱
5か月前
個人
段ボール箱
5か月前
個人
ゴミ収集器
5か月前
個人
土嚢運搬器具
6か月前
個人
楽ちんハンド
3か月前
個人
角筒状構造体
4か月前
個人
宅配システム
5か月前
個人
パウチ補助具
10か月前
個人
折り畳み水槽
11か月前
個人
バンド
16日前
個人
コード類収納具
6か月前
個人
廃棄物収容容器
1か月前
個人
お薬の締結装置
4か月前
個人
閉塞装置
8か月前
個人
ダンボール宝箱
11か月前
個人
把手付米袋
3か月前
株式会社和気
包装用箱
7か月前
個人
圧縮収納袋
11か月前
個人
積み重ね用補助具
1か月前
個人
ゴミ処理機
7か月前
株式会社コロナ
梱包材
4か月前
個人
貯蔵サイロ
5か月前
個人
蓋閉止構造
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ