TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025026641
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2024215254,2021171130
出願日
2024-12-10,2021-10-19
発明の名称
ロボットを基本動作させるためのアクチュエータへの指示を自動獲得する方法
出願人
KDDI株式会社
代理人
個人
,
個人
主分類
G05D
1/69 20240101AFI20250214BHJP(制御;調整)
要約
【課題】ロボットのスペックが様々に存在する状況においてもロボットを基本動作させるための指示の自動獲得を可能とする。
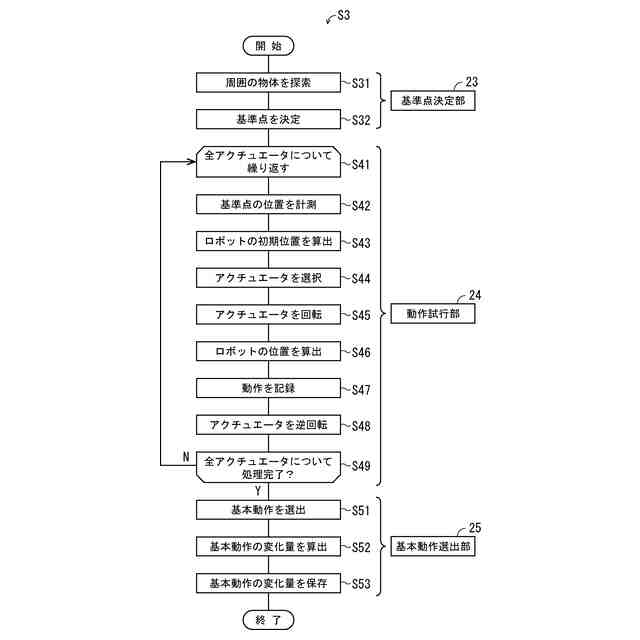
【解決手段】移動するロボットを基本動作させるためのアクチュエータへの指示を自動獲得する方法であって、ロボットが外界を認識するセンサと複数のアクチュエータ要素へのアクセスを確保し、当該複数要素の各々への制御入力の有無と、制御入力の信号種別との組合せを列挙(S41)し、組合せの各々においてアクチュエータへの制御入力を行う(S45)ことにより、ロボットを試行動作させ、試行動作の前後におけるロボットの移動を、試行動作の前後における前記センサの出力を用いて識別(S43,S46,S47)し、組合せの各々におけるロボットの移動の中から、基本動作に該当するものを選出(S51)して、選出された基本動作に対応する組み合わせを、ロボットを基本動作させるためのアクチュエータへの指示とする。
【選択図】図4
特許請求の範囲
【請求項1】
複数のアクチュエータによって駆動される移動機構により移動するロボットを基本動作させるための、前記複数のアクチュエータへの指示を自動獲得する方法であって、
前記ロボットと共通スペックの別ロボットに関して、基本動作と、当該別ロボットを当該基本動作させるための、複数のアクチュエータへの指示がテンプレートとして既知であり、
前記複数のアクチュエータ要素の各々への制御入力の有無と、
制御入力がある場合の
制御入力の信号種別
の
指定情報と、当該指定情報のもとで前記アクチュエータへの制御入力が行われることで、前記ロボットによって行われる個別動作の前後における前記ロボットの移動情報と、を紐づける形で、前記ロボットの動作ログを取得(S27)し、
前記動作ログ及び前記テンプレートを用いて学習(S28)することにより、前記基本動作を実現する最適なものとして、前記複数のアクチュエータ要素の各々への制御入力の有無と、
制御入力がある場合の
制御入力の信号種別との指定情報を自動獲得
し、
前記移動機構は車輪であり、前記複数のアクチュエータ要素の各々への制御入力
の信号種別に
は、当該アクチュエータ要素の駆動制御を介して対応する車輪を正転または反転させるもの
が含まれる
ことを特徴とする方法。
続きを表示(約 790 文字)
【請求項2】
前記学習(S28)することは、前記動作ログを、前記テンプレートに含まれる基本動作の各々に対応するクラスタへと分類(S281,S282)し、当該分類されたクラスタごとの動作ログから、前記基本動作を実現する最適なものを選出する(S284)ことを含むことを特徴とする請求項
1
に記載の方法。
【請求項3】
前記クラスタへと分類(S281,S282)することは、前記動作ログを構成する各々の個別動作を、当該個別動作の前後における前記ロボットの移動情報によって、教師なし学習により分類する(S282)ことを含むことを特徴とする請求項
1または2
に記載の方法。
【請求項4】
前記ロボットへドングルが接続される(S1)ことをトリガとして、前記アクチュエータへの指示を自動獲得する方法が実行されることを特徴とする請求項1ないし
3
のいずれかに記載の方法。
【請求項5】
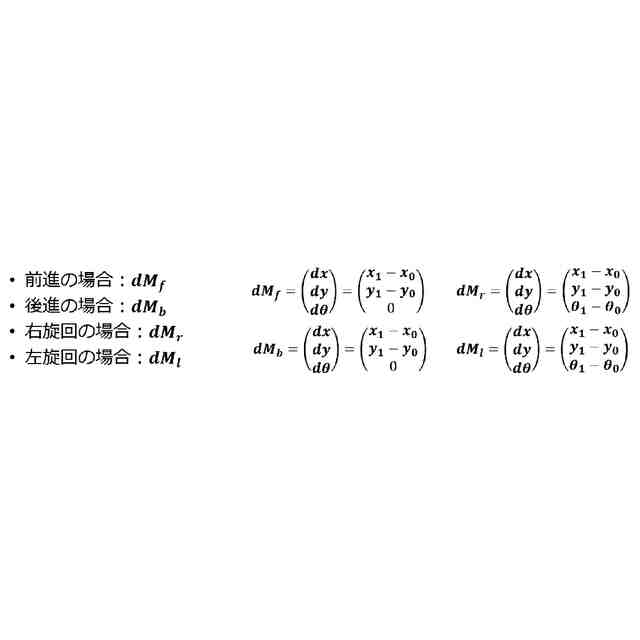
前記基本動作には、前記ロボットの平面上の移動のうち、前進、後退、右旋回または左旋回が含まれることを特徴とする請求項
2
に記載の方法。
【請求項6】
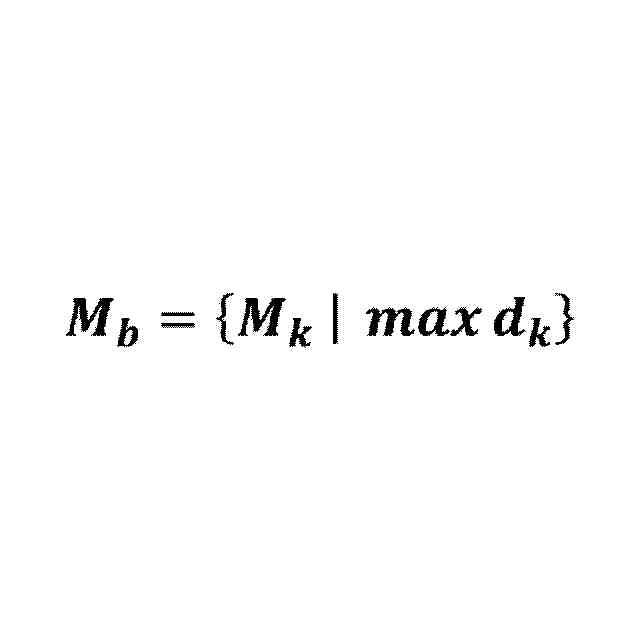
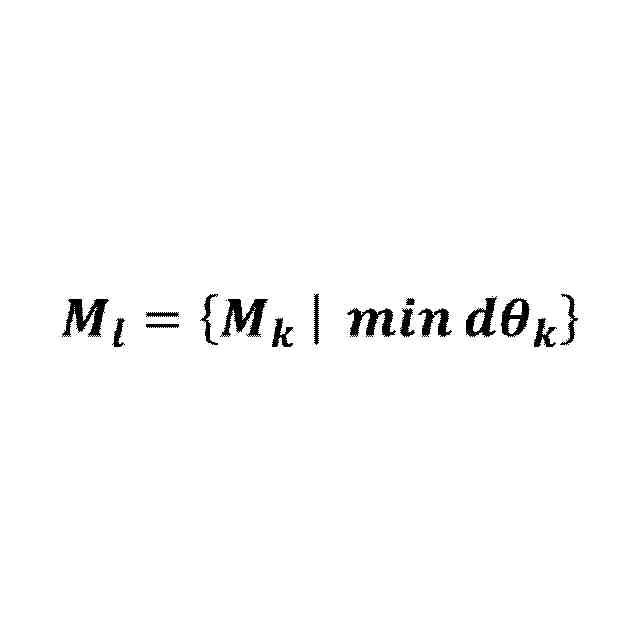
前記基本動作に該当するものを前進、後退、右旋回または左旋回として選出する(S284,S285)に際して、
前記クラスタごとの動作ログの中から、移動距離が前進に該当する、移動距離が後退に該当する、姿勢変化量が右旋回に該当する、または、姿勢変化量が左旋回に該当すると判定されるものを選択し、
前進、後退、右旋回または左旋回のうち1つにおいて、当該選択されたものが複数ある場合には、対応する移動距離または姿勢変化量が最大となるものを最も効果があるものとして選出することを特徴とする請求項5に記載の方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットを基本動作させるためのアクチュエータへの指示を自動獲得する方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
IoT(モノのインターネット)分野において、ロボットを活用することが行われている。特許文献1(発明の名称:大量のデータセットを使用する産業用のモノのインターネットのデータ収集環境における検出のための方法及びシステム)では、産業環境におけるデータ収集(IoT)を目的に、ロボットやドローンの遠隔制御、自律動作が行われる。特許文献2(発明の名称:自律学習型ロボット装置及び自律学習型ロボット装置の動作生成方法)では、ロボットと通信して環境に応じたロボットハンドの動作の学習がなされる。非特許文献1では、例えば屋内におけるカーペットや屋外における舗装などの個別の路面環境に応じたオドメトリの系統誤差を予め路面環境地図として記録しておき、ロボット実走行時の実位置推定時にこの地図を利用することで、路面環境にロバストなオドメトリを実現する。
【先行技術文献】
【特許文献】
【0003】
特表2020-530159号公報
特開2020-028950号公報
【非特許文献】
【0004】
山田大地, 大矢晃久: "路面環境地図に基づき系統誤差を校正するオドメトリ -多様な路面における有効性の検証-", 日本ロボット学会第30回記念学術講演会, 4J1-4 (2012.9)
【発明の概要】
【発明が解決しようとする課題】
【0005】
以上のような従来技術では、ロボット群を管理するシステムであるプラットフォームの側において、ロボットのスペックが既知であることを前提としていた。この前提の下では、プラットフォーム側から管理したいロボット群が例えば様々な店舗等の様々な現場に分かれて存在しており、個別のロボットごとにスペック(ロボットの製造業者やその型番などで定まるスペック)が様々に存在しうる状況において、適切な管理を行うことができなかった。すなわち、ロボットのスペックが既知であることを前提とする場合は、ロボットのスペックが多種多様に存在する場合、ロボットのスペックごとに手作業等で制御命令等を用意する手間が多く発生しまうこととなり、適切な管理が困難であった。
【0006】
ロボットのスペックとして具体的に例えば、車両型ロボットであってタイヤで移動する種類のロボットを対象とすることのみが既知であり、このような車両型ロボットに該当するロボットが多数・多種類に渡って存在しうる中で、スペックとしてタイヤの大きさなどの個体条件が不明であれば、このロボットに対して実行を依頼したいタスクを実現する際の要素的な動作である、ロボット移動の制御を行おうとしても、どのように制御すればどのようにロボットが移動するかが不明であるため、適切な制御や管理が不可能であった。
【0007】
上記従来技術の課題に鑑み、本発明は、ロボットのスペックが様々に存在する状況においてもロボットを基本動作させるための指示の自動獲得を可能とすることにより、ロボットの適切な管理を行うことのできる方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明は、アクチュエータによって駆動される移動機構により移動するロボットを基本動作させるための、前記アクチュエータへの指示を自動獲得する方法であって、前記ロボットが外界を認識するセンサへのアクセスを確保(S1,S2)し、前記アクチュエータを構成する複数のアクチュエータ要素の各々への制御入力のアクセスを確保(S1,S2)し、前記複数のアクチュエータ要素の各々への制御入力の有無と、制御入力の信号種別との組み合わせを列挙(S41)し、前記列挙された組み合わせの各々において前記アクチュエータへの制御入力を行う(S45)ことにより、前記ロボットを試行動作させ、当該試行動作の前後における前記ロボットの移動を、当該試行動作の前後における前記センサの出力を用いて識別(S43,S46,S47)し、前記列挙された組み合わせの各々における前記ロボットの移動の中から、基本動作に該当するものを選出(S51)して、当該選出された基本動作に対応する組み合わせを、前記ロボットを基本動作させるための前記アクチュエータへの指示として自動獲得することを第1の特徴とする。
【0009】
また、上記目的を達成するため、本発明は、複数のアクチュエータによって駆動される移動機構により移動するロボットを基本動作させるための、前記複数のアクチュエータへの指示を自動獲得する方法であって、前記ロボットと共通スペックの別ロボットに関して、基本動作と、当該別ロボットを当該基本動作させるための、複数のアクチュエータへの指示がテンプレートとして既知であり、前記複数のアクチュエータ要素の各々への制御入力の有無と、制御入力の信号種別との指定情報と、当該指定情報のもとで前記アクチュエータへの制御入力が行われることで、前記ロボットによって行われる個別動作の前後における前記ロボットの移動情報と、を紐づける形で、前記ロボットの動作ログを取得(S27)し、前記動作ログ及び前記テンプレートを用いて学習(S28)することにより、前記基本動作を実現する最適なものとして、前記複数のアクチュエータ要素の各々への制御入力の有無と、制御入力の信号種別との指定情報を自動獲得することを第2の特徴とする。
【発明の効果】
【0010】
前記第1の特徴によれば、複数のアクチュエータ要素の各々への制御入力の有無と、制御入力の信号種別との組み合わせを列挙してロボットを試行動作させ、試行動作の前後におけるロボットの移動の中から基本動作に対応するものを選別することにより、ロボットのスペックとしてアクチュエータ要素以降の移動機構の態様が不明であっても、ロボットに基本動作を実現させるための、複数のアクチュエータ要素への制御入力の態様を自動獲得することが可能であるため、ロボットのスペックが様々に存在する状況においても効率的に、適切な管理を行うことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
25日前
村田機械株式会社
産業機械
1か月前
アズビル株式会社
制御装置
18日前
株式会社ダイヘン
移動体
2か月前
神港テクノス株式会社
制御装置
2か月前
株式会社ダイヘン
移動体
2か月前
トヨタ自動車株式会社
自律移動体
1か月前
コフロック株式会社
流量制御装置
19日前
株式会社クボタ
作業車
1か月前
株式会社丸和製作所
入力機器
18日前
トヨタ自動車株式会社
配送システム
2か月前
株式会社豊田自動織機
荷役車両
11日前
アズビル株式会社
パラメータ調整装置
1か月前
株式会社フジキン
流体制御装置
2か月前
株式会社明電舎
車両
1か月前
株式会社フジキン
流量制御装置
18日前
株式会社村田製作所
温度補償回路
25日前
株式会社ダイフク
搬送設備
26日前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社シンテックホズミ
搬送ロボット
今日
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社ダイフク
物品搬送設備
1か月前
ローム株式会社
電源回路
2か月前
株式会社ダイフク
物品搬送設備
4日前
ローム株式会社
電源回路
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
26日前
キヤノン株式会社
情報処理装置
1か月前
株式会社ダイフク
物品搬送設備
26日前
村田機械株式会社
搬送車システム
2か月前
東フロコーポレーション株式会社
流量制御装置
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
19日前
旭精機工業株式会社
監視データ処理装置
1か月前
トヨタ自動車株式会社
群制御システム及び方法
2か月前
ブラザー工業株式会社
数値制御装置及び工作機械
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ