TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025025857
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023131048
出願日
2023-08-10
発明の名称
エレベータシステム
出願人
東芝エレベータ株式会社
代理人
弁理士法人スズエ国際特許事務所
主分類
G05D
1/43 20240101AFI20250214BHJP(制御;調整)
要約
【課題】ロボットが現在位置として認識している位置座標と実際の位置とのずれを補正して、乗りかごにスムーズに乗降できるようにしたエレベータシステムを提供する。
【解決手段】一実施形態に係るエレベータシステムのロボットは、予め与えられたマップ上におけるロボットの位置を示す位置座標を検出する位置検出手段と、ロボットに備えられたカメラを通じて、乗りかご内あるいは乗りかごの出入口付近の乗場の任意の箇所で2次元コードの情報を読み取るコード読取り手段と、コード読取り手段によって読み取られた2次元コードの情報と、カメラで捉えられた2次元コードの形状とに基づいて、位置検出手段によって検出された位置座標と実際の位置とのずれを補正する位置補正手段と、移動制御手段は、位置補正手段によって補正された位置座標に基づいて、ロボットが乗りかごを乗降するときの移動を制御する移動制御手段とを具備する。
【選択図】図1
特許請求の範囲
【請求項1】
自律走行型のロボットの移動とエレベータの乗りかごの運転とを連動させたエレベータシステムにおいて、
前記ロボットは、
予め与えられたマップ上における前記ロボットの位置を示す位置座標を検出する位置検出手段と、
前記ロボットに備えられたカメラを通じて、前記乗りかご内あるいは前記乗りかごの出入口付近の乗場の任意の箇所で2次元コードの情報を読み取るコード読取り手段と、
前記コード読取り手段によって読み取られた前記2次元コードの情報と、前記カメラで捉えられた前記2次元コードの形状とに基づいて、前記位置検出手段によって検出された前記位置座標と実際の位置とのずれを補正する位置補正手段と、
前記位置補正手段によって補正された前記位置座標に基づいて、前記ロボットが前記乗りかごを乗降するときの移動を制御する移動制御手段と
を具備したエレベータシステム。
続きを表示(約 1,100 文字)
【請求項2】
前記2次元コードの情報には、前記2次元コードの設置場所を示す第1のコード情報を含み、
前記位置補正手段は、
前記第1のコード情報に基づいて、前記ロボットが前記乗りかご内、または、前記乗場のどの場所にいるのかを判断し、前記ロボットのいる場所から見える前記2次元コードの形状に基づいて、前記位置座標と前記実際の位置とのずれをなくす方向に前記ロボットを移動させる
請求項1記載のエレベータシステム。
【請求項3】
前記2次元コードの情報には、前記2次元コードの設置場所付近に存在する前記エレベータの構造物のサイズや位置を示す第2のコード情報を含み、
前記移動制御手段は、
前記第2のコード情報に基づいて、前記エレベータの構造物のサイズや位置を前記ロボットの移動制御に反映させる、
請求項1記載のエレベータシステム。
【請求項4】
前記2次元コードの情報には、利用者が所定のサイトにアクセスするための第3のコード情報を含む、
請求項1記載のエレベータシステム。
【請求項5】
前記2次元コードは、プロジェクタによって前記乗りかご内あるいは前記乗場に投影される、
請求項1記載のエレベータシステム。
【請求項6】
前記2次元コードは、前記乗りかご内あるいは前記乗場に設置されたモニタに表示される、
請求項1記載のエレベータシステム。
【請求項7】
前記エレベータは、
前記乗りかご内における利用者の乗車位置を検出する乗車位置検出手段と、
前記乗車位置検出手段によって検出された前記利用者の乗車位置を示す第4のコード情報を含む前記2次元コードを生成する生成手段とを具備し、
前記エレベータは、前記生成手段によって生成された前記2次元コードを、前記プロジェクタによって前記乗りかご内あるいは前記乗場に投影する
請求項5記載のエレベータシステム。
【請求項8】
前記エレベータは、
前記乗りかご内における利用者の乗車位置を検出する乗車位置検出手段と、
前記乗車位置検出手段によって検出された前記利用者の乗車位置を示す第4のコード情報を含む前記2次元コードを生成する生成手段とを具備し、
前記エレベータは、前記生成手段によって生成された前記2次元コードを、前記モニタに表示する
請求項6記載のエレベータシステム。
【請求項9】
前記移動制御手段は、
前記第4のコード情報に基づいて、前記利用者の乗車位置を判断し、前記ロボットを前記乗りかご内の空いているスペースに移動させる
請求項7または8記載のエレベータシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、エレベータシステムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
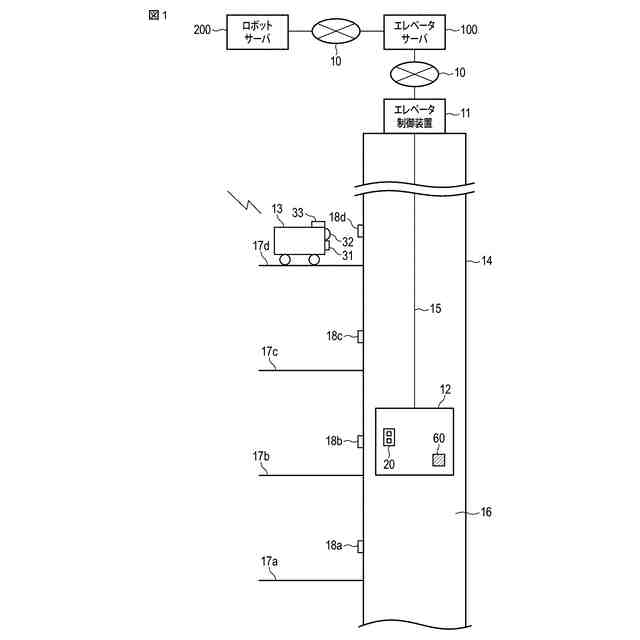
建物内において、荷物の運搬やフロアの清掃等を行う自律走行型のロボットが知られている。ロボットは、目的地等が入力されると、障害物を避けながら目的地まで移動し、各種作業を行う。このようなロボットは、エレベータと連動することで、エレベータを利用して各階に移動することができる。
【0003】
ロボットには、予め建物内の移動経路を示すマップが記憶されている。ロボットは、例えばカメラや距離センサ等を用いて、マップ上で自分の現在位置を示す位置座標を把握しながら、目的地に向かって自律的に走行する。しかし、センサ精度などが原因で、マップ上でロボットが現在位置として認識している位置座標と実際の位置との間にずれが生じ、一時停止や走行不能となることがある。
【先行技術文献】
【特許文献】
【0004】
特許第6801719号公報
特開2019-023848号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ロボットが現在位置として認識している位置座標と実際の位置とがずれた状態で移動していると、例えばロボットがエレベータの乗場に来たときに、乗りかごのドアにぶつかるなどして、スムーズに乗りかごに乗車できない可能性がある。降車時も同様であり、ドアにぶつかるなどして、スムーズに乗りかごから降車できない可能性がある。
【0006】
そこで、本発明が解決しようとする課題は、ロボットが現在位置として認識している位置座標と実際の位置とのずれを補正して、乗りかごにスムーズに乗降できるようにしたエレベータシステムを提供することにある。
【課題を解決するための手段】
【0007】
一実施形態に係るエレベータシステムは、自律走行型のロボットの移動とエレベータの乗りかごの運転とを連動させる。前記ロボットは、位置検出手段と、コード読取り手段と、位置補正手段と、移動制御手段とを具備する。前記位置検出手段は、予め与えられたマップ上における前記ロボットの位置を示す位置座標を検出する。前記コード読取り手段は、前記ロボットに備えられたカメラを通じて、前記乗りかご内あるいは前記乗りかごの出入口付近の乗場の任意の箇所で2次元コードの情報を読み取る。前記位置補正手段は、前記コード読取り手段によって読み取られた前記2次元コードの情報と、前記カメラで捉えられた前記2次元コードの形状とに基づいて、前記位置検出手段によって検出された前記位置座標と実際の位置とのずれを補正する。前記移動制御手段は、前記位置補正手段によって補正された前記位置座標に基づいて、前記ロボットが前記乗りかごを乗降するときの移動を制御する。
【図面の簡単な説明】
【0008】
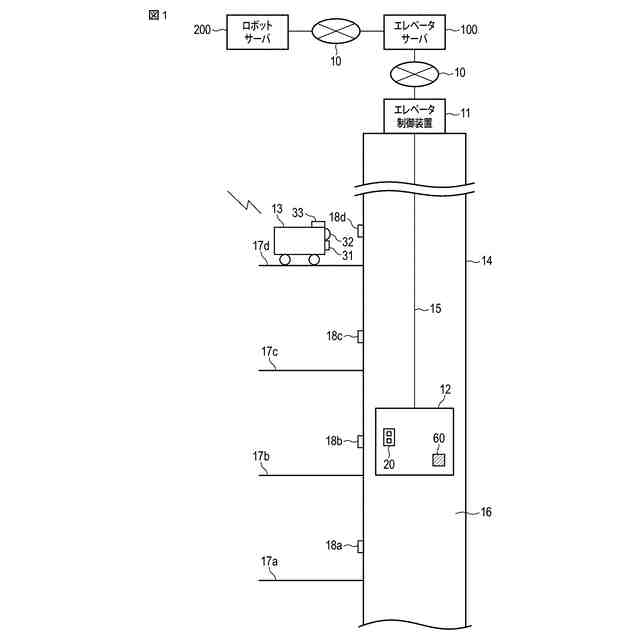
図1は、第1実施形態に係るエレベータシステムの構成を概略的に示す図である。
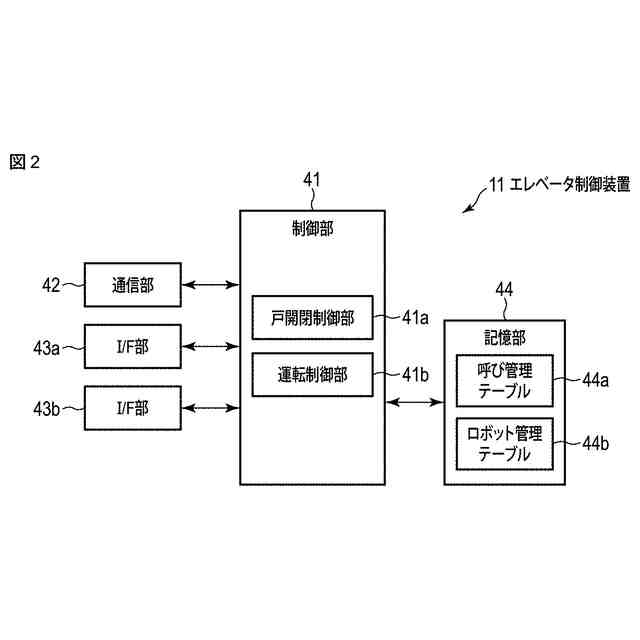
図2は、第1実施形態に係るエレベータ制御装置の機能構成の一例を示すブロック図である。
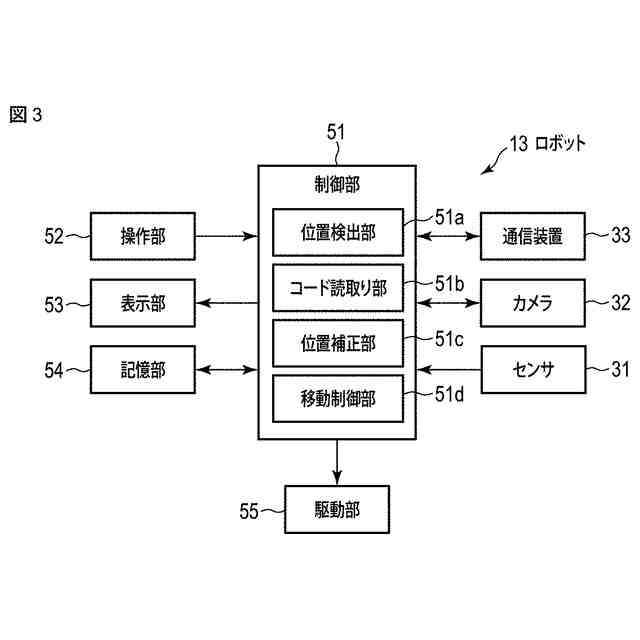
図3は、第1実施形態に係るロボットの機能構成の一例を示すブロック図である。
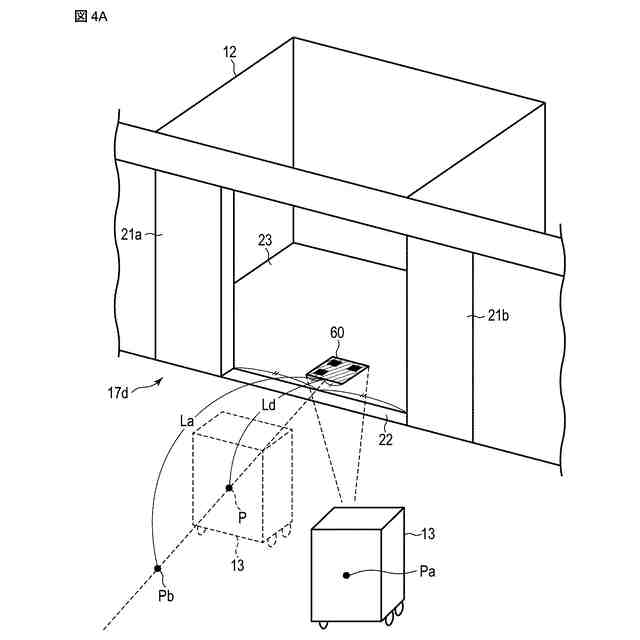
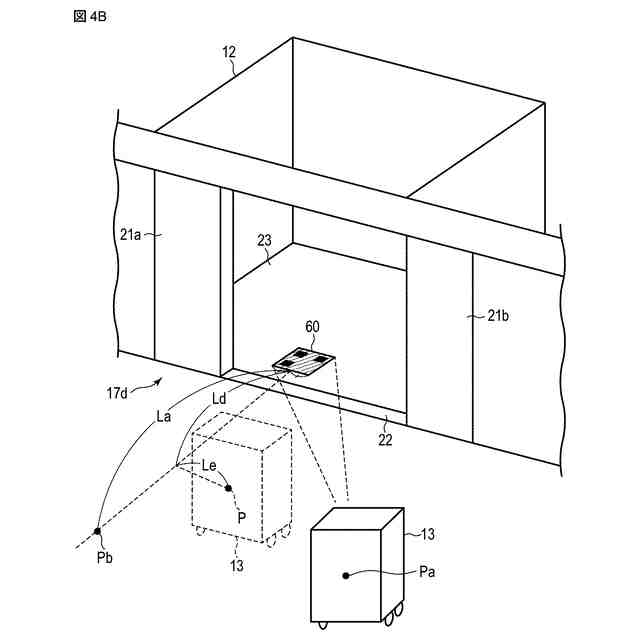
図4Aは、第1実施形態に係る2次元コードを用いたロボットの位置補正の方法について説明するための図である。
図4Bは、第1実施形態に係る2次元コードを用いたロボットの位置補正の方法について説明するための図である。
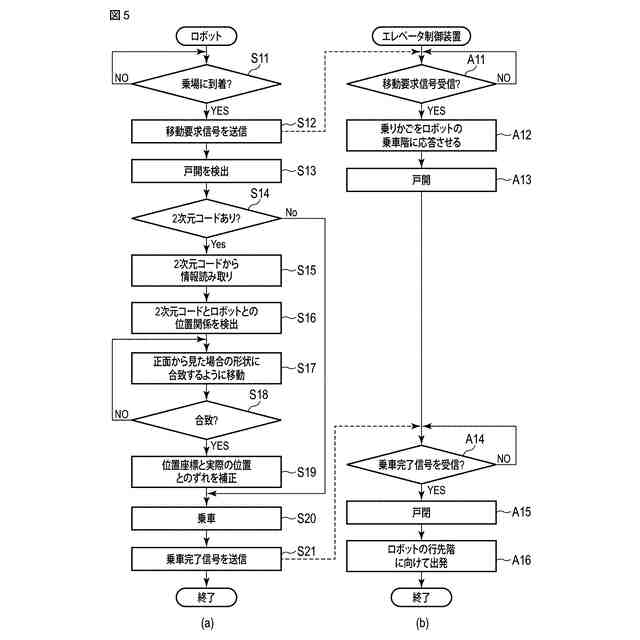
図5は、第1実施形態に係るシステムの具体的な処理手順の一例を示すフローチャートである。
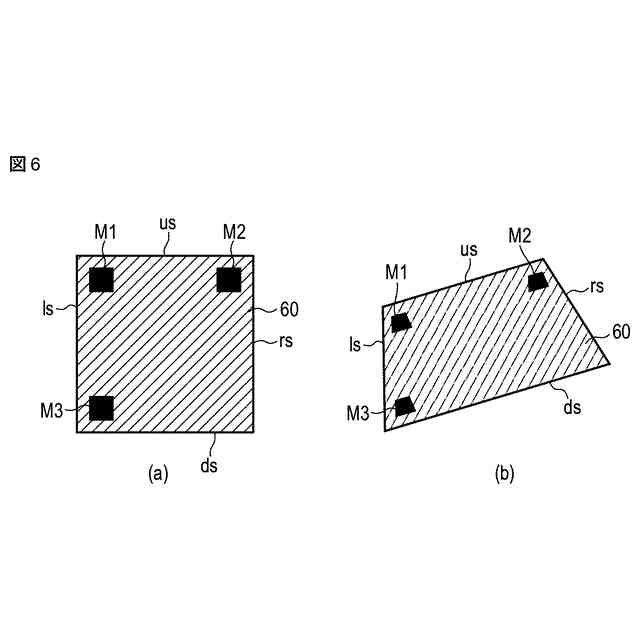
図6は、第1実施形態に係る2次元コードを正面から見た場合の形状について説明するための図である。
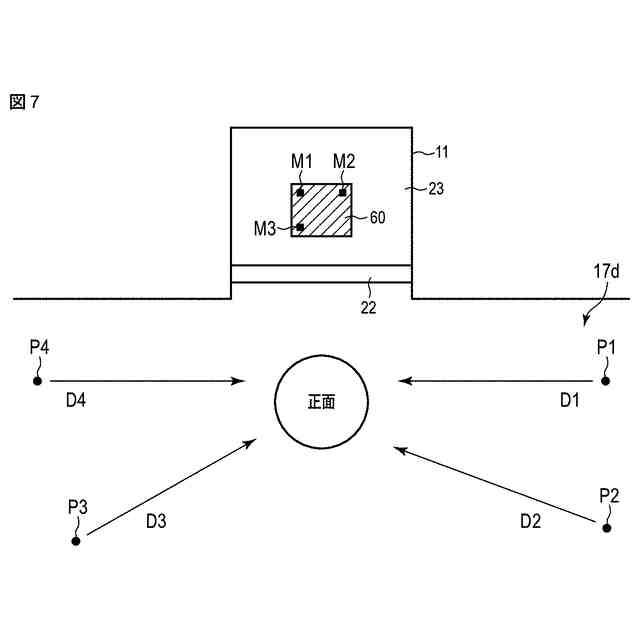
図7は、第1実施形態に係る2次元コードを正面から見た場合の形状について説明するための図である。
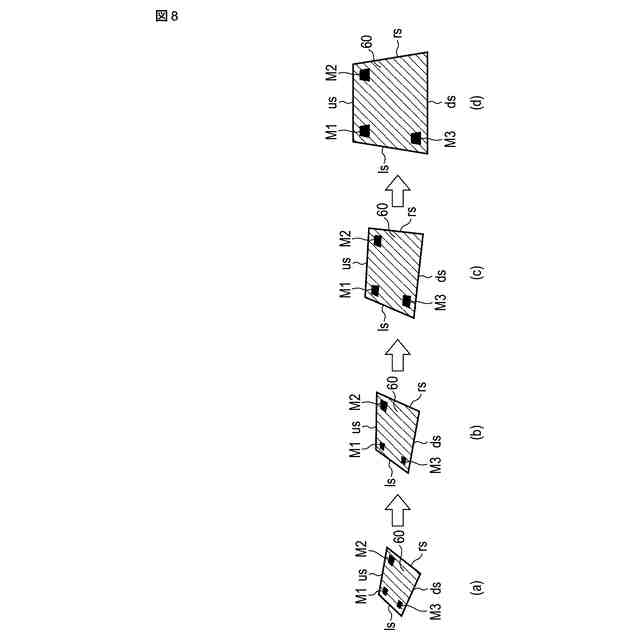
図8は、第1実施形態に係る2次元コードを正面から見た場合の形状について説明するための図である。
図9は、第1実施形態に係る2次元コードを正面から見た場合の形状について説明するための図である。
図10は、第1実施形態に係る乗りかご内の各箇所に2次元コードを設置した例を示す図である。
図11は、第1実施形態に係る乗場の各箇所に2次元コードを設置した例を示す図である。
図12は、第2実施形態に係るエレベータ制御装置の機能構成の一例を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して、各実施形態について説明する。
(第1実施形態)
まず、第1実施形態について説明する。
【0010】
なお、開示はあくまで一例にすぎず、以下の実施形態に記載した内容により発明が限定されるものではない。当業者が容易に相当し得る変形は、当然に開示の範囲に含まれる。説明をより明確にするため、図面において、各部分のサイズ、形状等を実際の実施形態に対して変更して模式的に表す場合もある。複数の図面において、対応する要素には同じ参照数字を付して、詳細な説明を省略する場合もある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
1か月前
村田機械株式会社
産業機械
1か月前
アズビル株式会社
制御装置
1か月前
株式会社ダイヘン
移動体
3か月前
株式会社ダイヘン
移動体
3か月前
神港テクノス株式会社
制御装置
3か月前
コフロック株式会社
流量制御装置
1か月前
トヨタ自動車株式会社
自律移動体
1か月前
スター精密株式会社
工作機械
今日
株式会社丸和製作所
入力機器
1か月前
株式会社クボタ
作業車
1か月前
トヨタ自動車株式会社
配送システム
3か月前
株式会社フジキン
流体制御装置
3か月前
株式会社フジキン
流量制御装置
1か月前
アズビル株式会社
パラメータ調整装置
2か月前
株式会社豊田自動織機
荷役車両
26日前
株式会社明電舎
車両
1か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社シンテックホズミ
搬送ロボット
15日前
トヨタ自動車株式会社
ロボットシステム
2か月前
株式会社ダイフク
搬送設備
1か月前
株式会社村田製作所
温度補償回路
1か月前
株式会社ダイフク
物品搬送設備
1か月前
国立大学法人広島大学
モデル誤差抑制補償器
5日前
キヤノン株式会社
情報処理装置
2か月前
ローム株式会社
電源回路
2か月前
株式会社ダイフク
物品搬送設備
19日前
株式会社ダイフク
物品搬送設備
3か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
ローム株式会社
電源回路
3か月前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
東フロコーポレーション株式会社
流量制御装置
2か月前
旭精機工業株式会社
監視データ処理装置
1か月前
トヨタ自動車株式会社
群制御システム及び方法
3か月前
村田機械株式会社
搬送車システム
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ