TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025025016
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023129448
出願日
2023-08-08
発明の名称
手順作成支援装置、手順作成支援方法及び手順作成支援プログラム
出願人
株式会社ダイセル
代理人
弁理士法人秀和特許事務所
主分類
G05B
23/02 20060101AFI20250214BHJP(制御;調整)
要約
【課題】プラントの非定常運転における運転条件の決定を支援する。
【解決手段】手順作成支援装置は、プラントの過去の非定常運転において出力されたプロセスデータを取得することと、プロセスデータに基づく特徴量を説明変数として、所定の目的変数との関係を回帰分析により学習させた学習済みモデルを作成することと、学習済みモデルと、説明変数の想定値とを用いてシミュレーションを行うことと、学習済みモデルの回帰係数、シミュレーションの結果、及び説明変数に関して予め定められた制約となる条件を出力することと、ユーザから説明変数を修正する操作を受け付けた場合、学習済みモデルを修正し、又はユーザから想定値を修正する操作を受け付けた場合、修正後の想定値を用いてシミュレーションを行うことと、を実行する処理部を備える。
【選択図】図2
特許請求の範囲
【請求項1】
プラントの過去の非定常運転において出力されたプロセスデータを取得することと、
前記プロセスデータに基づく特徴量を説明変数として、所定の目的変数との関係を回帰分析により学習させた学習済みモデルを作成することと、
前記学習済みモデルと、前記説明変数の想定値とを用いてシミュレーションを行うことと、
前記学習済みモデルの回帰係数、前記シミュレーションの結果、及び前記説明変数に関して予め定められた制約となる条件を出力することと、
ユーザから前記説明変数を修正する操作を受け付けた場合、前記学習済みモデルを修正し、又は前記ユーザから前記想定値を修正する操作を受け付けた場合、修正後の想定値を用いて前記シミュレーションを行うことと、
を実行する処理部を備える手順作成支援装置。
続きを表示(約 1,300 文字)
【請求項2】
前記処理部は、前記学習済みモデルの前記回帰係数又は当該回帰係数に基づく値を、前記学習済みモデルにおいて当該回帰係数に乗じられている前記説明変数の、前記目的変数の変化に対する影響の大きさの指標として出力する
請求項1に記載の手順作成支援装置。
【請求項3】
前記ユーザから前記回帰係数の符号の指定を受けた場合、前記学習済みモデルは、当該回帰係数の符号が前記ユーザの指定と異なる場合にコストを増大させる正則化項を用いて、当該正則化項を含むコスト関数を最小化するように回帰分析を行い、
前記制約となる条件は、前記目的変数を前記プラントの定常運転における値に変化させるために、1つの前記説明変数を増減させるべき方向に関する因果関係情報を含む
請求項2に記載の手順作成支援装置。
【請求項4】
前記因果関係情報は、異なる観点に基づいて前記説明変数を増減させるべき方向を表す複数の情報を含む
請求項3に記載の手順作成支援装置。
【請求項5】
前記制約となる条件は、前記過去の非定常運転において出力されたプロセスデータに基づく説明変数の範囲内であることを含む
請求項1に記載の手順作成支援装置。
【請求項6】
プラントの過去の非定常運転において出力されたプロセスデータを取得することと、
前記プロセスデータに基づく特徴量を説明変数として、所定の目的変数との関係を回帰分析により学習させた学習済みモデルを作成することと、
前記学習済みモデルと、前記説明変数の想定値とを用いてシミュレーションを行うことと、
前記学習済みモデルの回帰係数、前記シミュレーションの結果、及び前記説明変数に関して予め定められた制約となる条件を出力することと、
ユーザから前記説明変数を修正する操作を受け付けた場合、前記学習済みモデルを修正し、又は前記ユーザから前記想定値を修正する操作を受け付けた場合、修正後の想定値を用いて前記シミュレーションを行うことと、
を1以上のコンピュータが実行する手順作成支援方法。
【請求項7】
プラントの過去の非定常運転において出力されたプロセスデータを取得することと、
前記プロセスデータに基づく特徴量を説明変数として、所定の目的変数との関係を回帰分析により学習させた学習済みモデルを作成することと、
前記学習済みモデルと、前記説明変数の想定値とを用いてシミュレーションを行うこと
と、
前記学習済みモデルの回帰係数、前記シミュレーションの結果、及び前記説明変数に関して予め定められた制約となる条件を出力することと、
ユーザから前記説明変数を修正する操作を受け付けた場合、前記学習済みモデルを修正し、又は前記ユーザから前記想定値を修正する操作を受け付けた場合、修正後の想定値を用いて前記シミュレーションを行うことと、
をコンピュータに実行させるための手順作成支援プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、手順作成支援装置、手順作成支援方法及び手順作成支援プログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、プラントの運転条件最適化システムが提案されている(特許文献1)。本システムにおける計測データ記録部は、運転状態データ取得部により取得された運転状態データと運転指標データ取得部により求められた運転指標データとを所定の項目に基づき関連させた一連の計測データとして計測DBに記録する。また、回帰モデル作成部は、運転状態データ側を表す運転状態変数を説明変数とし、運転指標データ側を表す運転指標変数を目的変数として所定の多変量解析を行って回帰モデルを作成する。また、運転指標変数最適化部は、回帰モデルに基づき運転指標変数を最適化する運転状態変数を求める。
【先行技術文献】
【特許文献】
【0003】
特開2012-74007号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えばプラントの運転開始から定常運転までの立上げ時のような非定常運転においては、製品の品質やコストに対する運転条件の影響の因果関係が複雑であり望ましい運転条件を見出すことは容易ではなかった。そこで、本開示は、プラントの非定常運転における運転条件の決定を支援するための技術を提供することを目的とする。
【課題を解決するための手段】
【0005】
本開示に係る手順作成支援装置は、以下の態様により実現することができる。
(態様1)
プラントの過去の非定常運転において出力されたプロセスデータを取得することと、
プロセスデータに基づく特徴量を説明変数として、所定の目的変数との関係を回帰分析により学習させた学習済みモデルを作成することと、
学習済みモデルと、説明変数の想定値とを用いてシミュレーションを行うことと、
学習済みモデルの回帰係数、シミュレーションの結果、及び説明変数に関して予め定められた制約となる条件を出力することと、
ユーザから説明変数を修正する操作を受け付けた場合、学習済みモデルを修正し、又はユーザから想定値を修正する操作を受け付けた場合、修正後の想定値を用いてシミュレーションを行うことと、
を実行する処理部を備える手順作成支援装置。
(態様2)
処理部は、学習済みモデルの回帰係数又は当該回帰係数の絶対値を、学習済みモデルにおいて当該回帰係数に乗じられている説明変数の、目的変数の変化に対する影響の大きさの指標として出力する
態様1に記載の手順作成支援装置。
(態様3)
制約となる条件は、過去の非定常運転において出力されたプロセスデータに基づく説明変数の範囲内であることを含む
態様1又は2に記載の手順作成支援装置。
(態様4)
ユーザから回帰係数の符号の指定を受けた場合、学習済みモデルは、当該回帰係数の符号がユーザの指定と異なる場合にコストを増大させる正則化項を用いて、当該正則化項を含むコスト関数を最小化するように回帰分析を行い、
制約となる条件は、目的変数をプラントの定常運転における値に変化させるために、1つの説明変数を増減させるべき方向に関する因果関係情報を含む
態様1から3の何れか一つに記載の手順作成支援装置。
(態様5)
因果関係情報は、異なる観点に基づいて説明変数を増減させるべき方向を表す複数の情報を含む
態様4に記載の手順作成支援装置。
【0006】
なお、課題を解決するための手段の内容は、コンピュータ等の装置若しくは複数の装置を含むシステム、コンピュータが実行する方法、又はコンピュータに実行させるプログラムとして提供することができる。なお、プログラムを保持する記録媒体を提供するようにしてもよい。
【発明の効果】
【0007】
開示の技術によれば、プラントの非定常運転における運転条件の決定を支援するための技術を提供するこができる。
【図面の簡単な説明】
【0008】
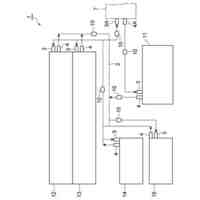
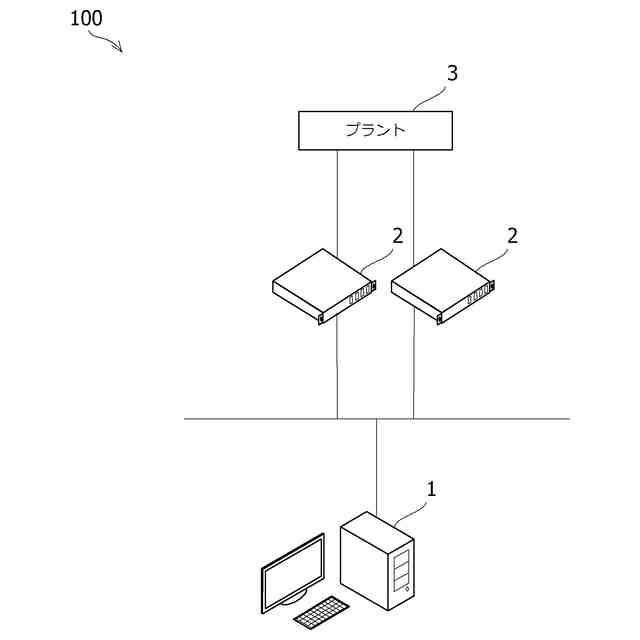
図1は、システムの一例を表す図である。
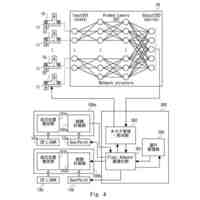
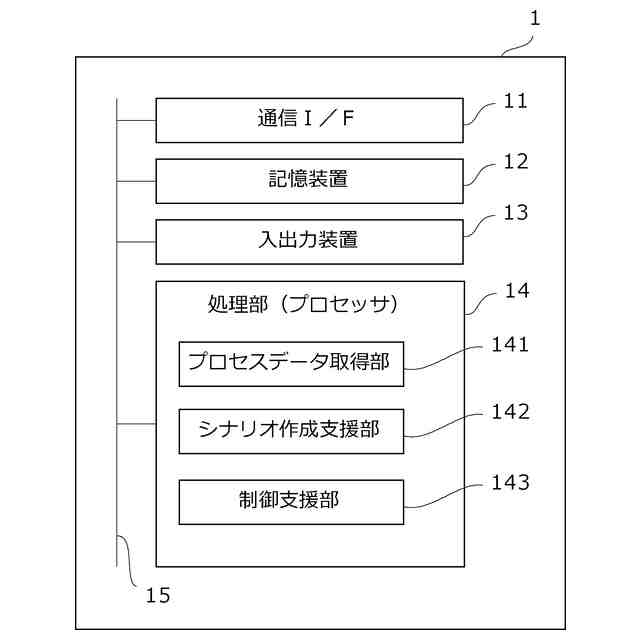
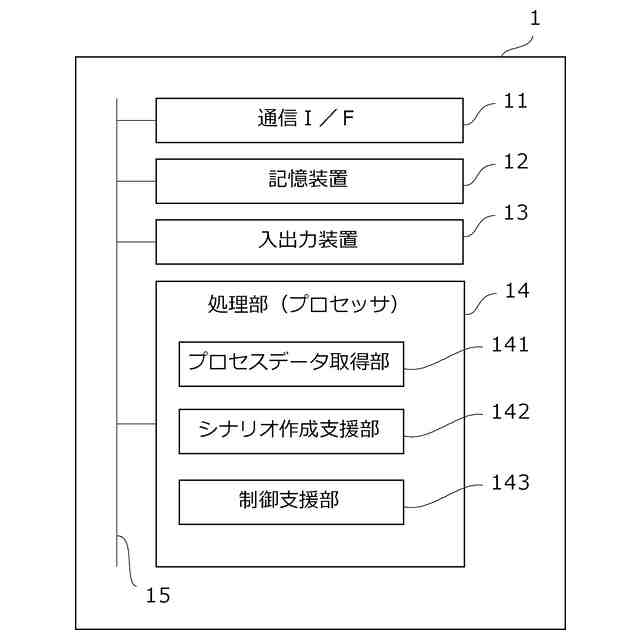
図2は、情報処理装置の構成の一例を示すブロック図である。
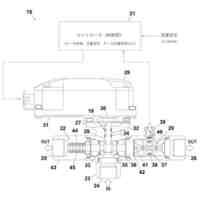
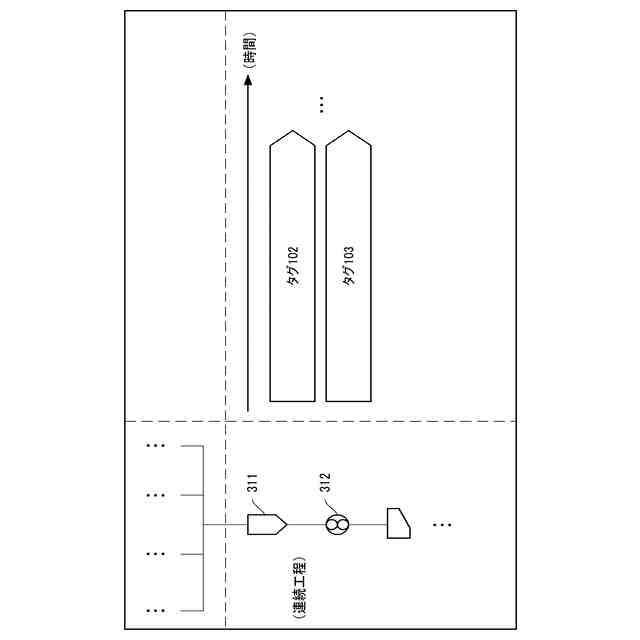
図3は、プラントが備える機器によって行われるプロセスの一例を示す模式的な図である。
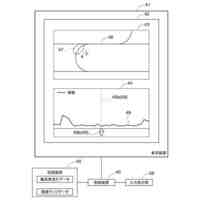
図4は、バッチ工程におけるプロセスデータの一例を説明するための図である。
図5は、連続工程におけるプロセスデータの一例を説明するための図である。
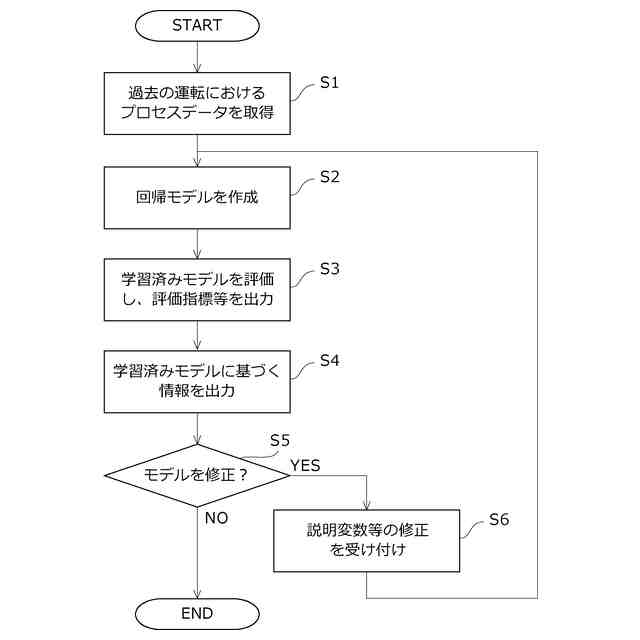
図6は、情報処理装置が実行するシナリオ作成支援処理の一例を示す処理フロー図である。
図7は、模式的なシナリオの一例を説明するための図である。
図8は、運転条件の一例を示す図である。
図9は、特徴量の一例を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照しつつ予測装置の実施形態について説明する。
【0010】
<実施形態>
図1は、本実施形態に係るシステムの一例を表す図である。システム100は、情報処理装置1と、制御ステーション2と、プラント3とを含む。システム100は、例えば分散型制御システム(DCS:Distributed Control System)であり、複数の制御ステーション2を含む。すなわち、プラント3の制御系は複数の区画に分割され、各制御区画が制御ステーション2によって分散制御される。制御ステーション2は、DCSにおける既存の設備であり、プラント3が備えるセンサ等から出力される状態信号を受信したり、プラント3に対して制御信号を出力する。そして、制御信号に基づいて、プラント3が備えるバルブ等のアクチュエータやその他の機器が制御される。また、システム100は、複数のプラント3を含む。プラント3は、例えば化学プラントであり、製品を生産する生産プラント等である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
1か月前
村田機械株式会社
産業機械
1か月前
アズビル株式会社
制御装置
25日前
株式会社ダイヘン
移動体
2か月前
株式会社ダイヘン
移動体
2か月前
神港テクノス株式会社
制御装置
2か月前
コフロック株式会社
流量制御装置
26日前
トヨタ自動車株式会社
自律移動体
1か月前
株式会社丸和製作所
入力機器
25日前
トヨタ自動車株式会社
配送システム
2か月前
株式会社クボタ
作業車
1か月前
株式会社フジキン
流量制御装置
25日前
アズビル株式会社
パラメータ調整装置
1か月前
株式会社フジキン
流体制御装置
2か月前
株式会社明電舎
車両
1か月前
株式会社豊田自動織機
荷役車両
18日前
株式会社村田製作所
温度補償回路
1か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社シンテックホズミ
搬送ロボット
7日前
株式会社ダイフク
物品搬送設備
1か月前
ローム株式会社
電源回路
2か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
11日前
株式会社ダイフク
物品搬送設備
1か月前
キヤノン株式会社
情報処理装置
1か月前
株式会社ダイフク
物品搬送設備
2か月前
ローム株式会社
電源回路
2か月前
旭精機工業株式会社
監視データ処理装置
1か月前
村田機械株式会社
搬送車システム
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
26日前
トヨタ自動車株式会社
群制御システム及び方法
2か月前
東フロコーポレーション株式会社
流量制御装置
2か月前
ブラザー工業株式会社
数値制御装置及び工作機械
1か月前
株式会社ダイフク
情報表示システム
2か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ