TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025021561
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023125346
出願日
2023-08-01
発明の名称
管制局、処理システム、処理方法、およびプログラム
出願人
日本電気株式会社
代理人
個人
,
個人
主分類
B64G
5/00 20060101AFI20250206BHJP(航空機;飛行;宇宙工学)
要約
【課題】他の管制局と通信ネットワークを介して通信できない状態であっても、アンテナに追尾対象の衛星を追尾させることのできる管制局を提供する。
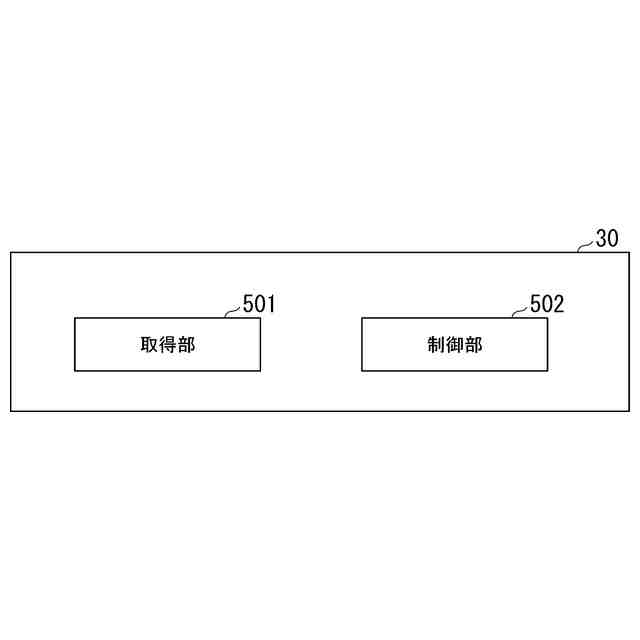
【解決手段】管制局は、他の管制局と通信ネットワークを介して通信できない状態の管制局であって、追尾対象の第1衛星の3次元空間における位置に係る情報を、前記第1衛星から取得する取得部と、前記取得部が取得した前記第1衛星の3次元空間における位置に係る情報に基づいて、アンテナの向きを制御する制御部と、を備える。
【選択図】図12
特許請求の範囲
【請求項1】
他の管制局と通信ネットワークを介して通信できない状態の管制局であって、
追尾対象の第1衛星の3次元空間における位置に係る情報を、前記第1衛星から取得する取得部と、
前記取得部が取得した前記第1衛星の3次元空間における位置に係る情報に基づいて、アンテナの向きを制御する制御部と、
を備える管制局。
続きを表示(約 1,000 文字)
【請求項2】
前記第1衛星の3次元空間における位置に係る情報は、
所定の時刻ごとの前記第1衛星の3次元空間における位置を示す情報であり、
前記取得部が取得する前記所定の時刻ごとの前記第1衛星の3次元空間における位置を示す情報に基づいて、将来の前記第1衛星の位置を予測する予測部、
を備え、
前記取得部は、
前記所定の時刻ごとの前記第1衛星の3次元空間における位置を示す情報を、前記第1衛星から取得し、
前記制御部は、
前記予測部が予測した将来の前記第1衛星の位置に基づいて、前記アンテナの向きを制御する、
請求項1に記載の管制局。
【請求項3】
前記第1衛星の3次元空間における位置に係る情報は、
前記他の管制局が予測した将来の前記第1衛星の位置を示す情報であり、
前記取得部は、
前記第1衛星が前記他の管制局との間の通信により取得した将来の前記第1衛星の位置を、前記第1衛星から取得し、
前記制御部は、
前記取得部が取得した将来の前記第1衛星の位置に基づいて、前記アンテナの向きを制御する、
請求項1に記載の管制局。
【請求項4】
前記制御部は、
前記アンテナの方位角を調整する軸回りの回転、および、前記アンテナの仰角を調整する軸回りの回転を制御することにより、前記アンテナの向きを制御する、
請求項1に記載の管制局。
【請求項5】
請求項1から請求項4の何れか一項に記載の管制局と、
前記管制局と通信を行う前記第1衛星と、
を備える処理システム。
【請求項6】
他の管制局と通信ネットワークを介して通信できない状態の管制局が実行する処理方法であって、
追尾対象の第1衛星の3次元空間における位置に係る情報を、前記第1衛星から取得することと、
取得した前記第1衛星の3次元空間における位置に係る情報に基づいて、アンテナの向きを制御することと、
を含む処理方法。
【請求項7】
他の管制局と通信ネットワークを介して通信できない状態の管制局のコンピュータに、
追尾対象の第1衛星の3次元空間における位置に係る情報を、前記第1衛星から取得することと、
取得した前記第1衛星の3次元空間における位置に係る情報に基づいて、アンテナの向きを制御することと、
を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、管制局、処理システム、処理方法、およびプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
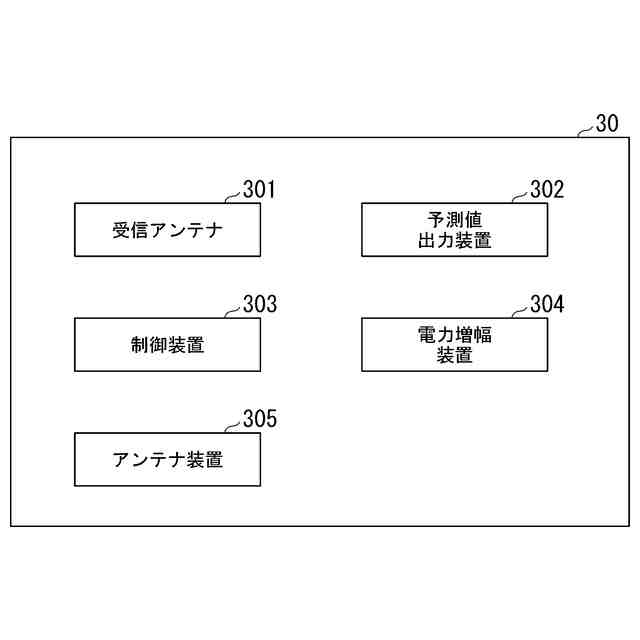
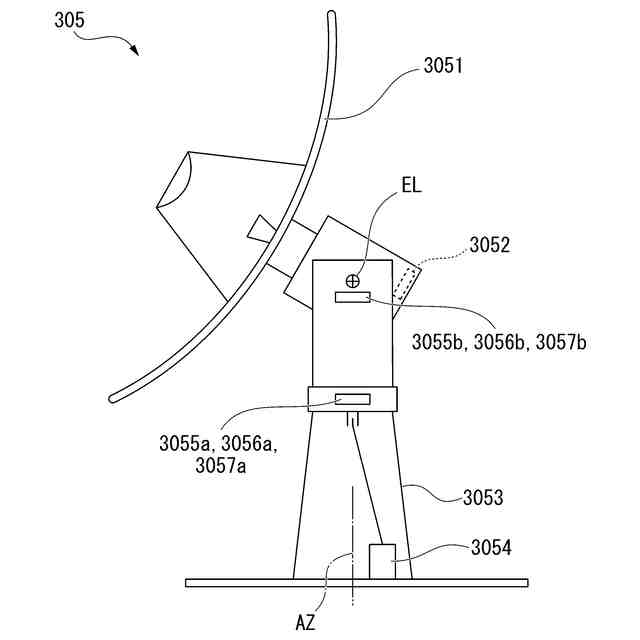
衛星を追尾しながら通信するアンテナ装置は、方位角(AZ(AZimuth)角)および仰角(EL(ELevation)角)をそれぞれ調整する軸(以下、「AZ軸」、「EL軸」と記載)を持つアンテナを備え、AZ軸、EL軸を中心とする角度を調整しながら衛星を追尾する。特許文献1には、関連する技術として、通信ネットワーク(IPネットワーク)を介して互いに通信する地上局を含む指令システムに関する技術が開示されている。特許文献2には、関連する技術として、人工衛星の軌道を決定する装置に関する技術が開示されている。特許文献3には、関連する技術として、人工衛星の姿勢を決定する装置に関する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
欧州特許出願公開第3493428号明細書
特開2011-005985号公報
特開平10-072000号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
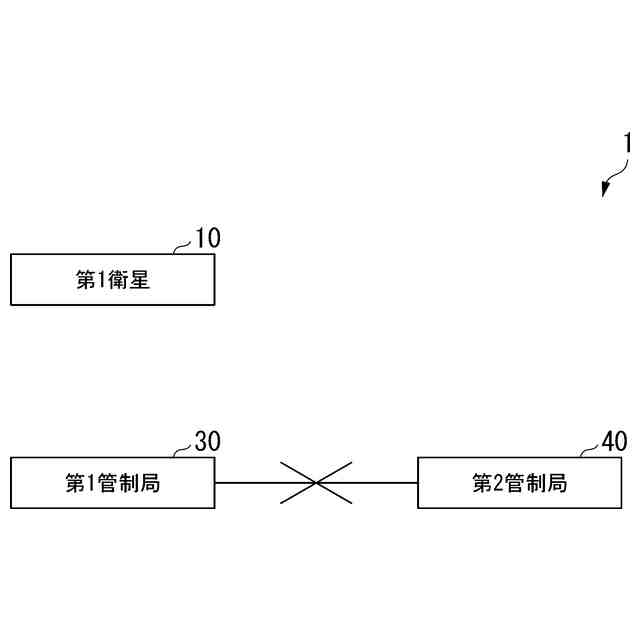
アンテナ装置による衛星の追尾は、一般的に、そのアンテナ装置を備える管制局と、別の管制局とが通信ネットワークを介してその追尾に必要な情報を互いに授受することにより実現される。そのため、一般的に、そのアンテナ装置を備える管制局と、別の管制局との間の通信ネットワークが遮断されている場合、アンテナ装置は衛星を追尾できない。
そこで、管制局が他の管制局と通信ネットワークを介して通信できない状態であっても、アンテナに追尾対象の衛星を追尾させることのできる技術が求められている。
【0005】
本開示の各態様は、上記の課題を解決することのできる管制局、処理システム、処理方法、およびプログラムを提供することを目的としている。
【課題を解決するための手段】
【0006】
本開示の一態様によれば、管制局は、他の管制局と通信ネットワークを介して通信できない状態の管制局であって、追尾対象の第1衛星の3次元空間における位置に係る情報を、前記第1衛星から取得する取得部と、前記取得部が取得した前記第1衛星の3次元空間における位置に係る情報に基づいて、アンテナの向きを制御する制御部と、を備える。
【0007】
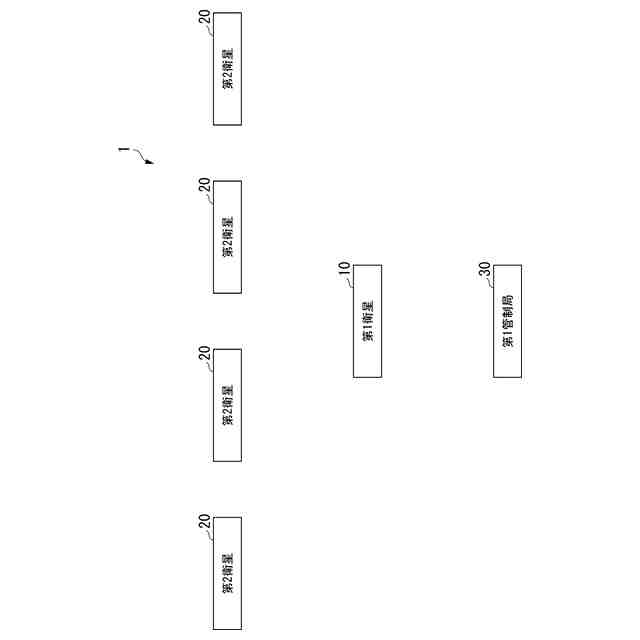
本開示の別の態様によれば、処理システムは、上記の管制局と、前記管制局と通信を行う前記第1衛星と、を備える。
【0008】
本開示の別の態様によれば、処理方法は、他の管制局と通信ネットワークを介して通信できない状態の管制局が実行する処理方法であって、追尾対象の第1衛星の3次元空間における位置に係る情報を、前記第1衛星から取得することと、取得した前記第1衛星の3次元空間における位置に係る情報に基づいて、アンテナの向きを制御することと、を含む。
【0009】
本開示の別の態様によれば、プログラムは、他の管制局と通信ネットワークを介して通信できない状態の管制局のコンピュータに、追尾対象の第1衛星の3次元空間における位置に係る情報を、前記第1衛星から取得することと、取得した前記第1衛星の3次元空間における位置に係る情報に基づいて、アンテナの向きを制御することと、を実行させる。
【発明の効果】
【0010】
本開示の各態様によれば、管制局が他の管制局と通信ネットワークを介して通信できない状態であっても、アンテナに追尾対象の衛星を追尾させることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
光学モジュール
2日前
日本電気株式会社
無線端末、方法、及びプログラム
2日前
日本電気株式会社
管理装置、管理方法、及びプログラム
1日前
日本電気株式会社
マルチコアファイバ光増幅器及び光増幅方法
1日前
日本電気株式会社
権利管理装置、システム、方法およびプログラム
3日前
日本電気株式会社
サーバ装置、サーバ装置の制御方法及びプログラム
1日前
日本電気株式会社
レシピ提案装置、レシピ提案方法、およびプログラム
2日前
日本電気株式会社
情報処理装置、情報処理方法、及び情報処理システム
3日前
日本電気株式会社
情報処理装置、表示制御方法、および表示制御プログラム
2日前
日本電気株式会社
入出場管理装置、入退場管理方法及び入退場管理プログラム
2日前
日本電気株式会社
組合せ最適化問題求解装置および組合せ最適化問題求解方法
3日前
日本電気株式会社
秘匿化装置、推定装置、表示装置、推定システム、秘匿化方法、推定方法およびプログラム
3日前
日本電気株式会社
温室効果ガス排出量評価装置、温室効果ガス排出量評価方法及び温室効果ガス排出量評価プログラム
1日前
個人
飛行体
12か月前
個人
ドローン
22日前
個人
ドローンシステム
2か月前
株式会社三圓
浮上装置
6か月前
個人
空港用貨物搬送車
10か月前
個人
垂直離着陸機用エンジン改
1か月前
個人
ドローンの計測操作方法3
6か月前
個人
飛行艇
8か月前
個人
ドローンの計測操作方法2
6か月前
個人
マルチコプター型電気飛行機
11か月前
キヤノン電子株式会社
磁気トルカ
7か月前
個人
人工衛星推進材循環エンジン
11か月前
個人
ドローンを自動離着陸する方法
2か月前
個人
空中移動システム
3か月前
個人
ドローン消音装置
4か月前
トヨタ自動車株式会社
ドローン
9日前
個人
エアライナー全自動パラシュート
22日前
株式会社SUBARU
電動航空機
10か月前
合同会社アドエア
飛行体の落下補助装置
3か月前
株式会社ACSL
システム
29日前
合同会社アドエア
パラシュート射出装置
22日前
株式会社セネック
ドローンポート
9か月前
株式会社ACSL
システム
29日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ