TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025021141
公報種別
公開特許公報(A)
公開日
2025-02-13
出願番号
2023124885
出願日
2023-07-31
発明の名称
数値制御装置、工作機械、制御方法、プログラム、及び記憶媒体
出願人
ブラザー工業株式会社
代理人
個人
主分類
B23Q
3/155 20060101AFI20250205BHJP(工作機械;他に分類されない金属加工)
要約
【課題】工具ホルダのテーパ部を洗浄する能力を維持し、工具ホルダを洗浄する為の流体の消費を抑制できる数値制御装置、工作機械、制御方法、プログラム、及び記憶媒体を提供する。
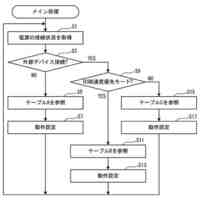
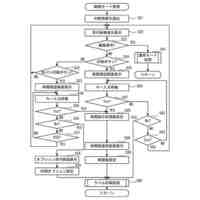
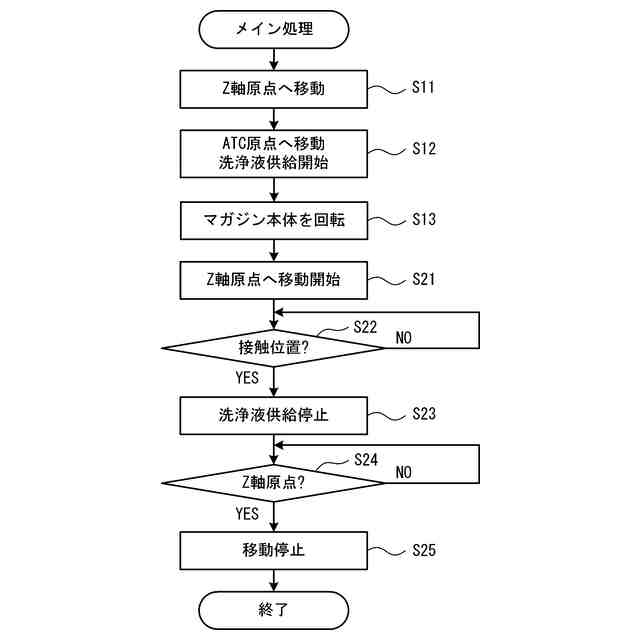
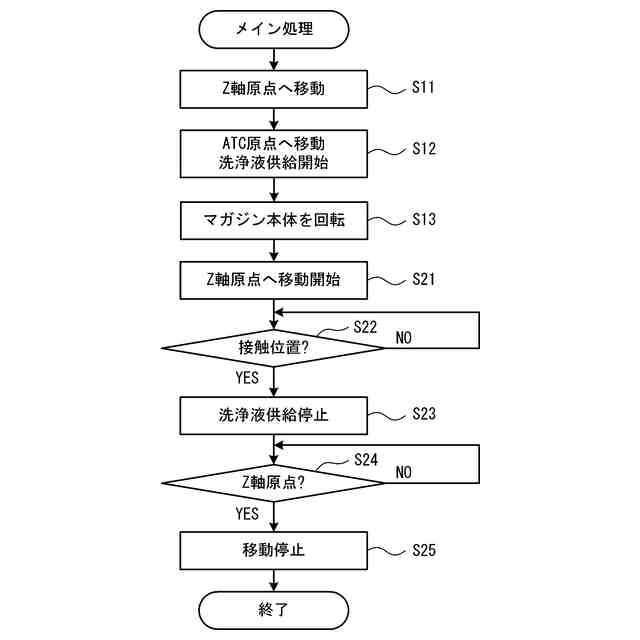
【解決手段】CPUは、交換機構による工具交換時、装着穴に工具ホルダのテーパ部が装着するように、主軸ヘッドを次工具に向けて移動する(S21)。CPUは、主軸ヘッドの移動時、供給手段によりノズルに流体を供給することで、次工具を取り付けた工具ホルダに向けてノズルから流体を噴出する(S12)。CPUは、流体が当たらなくなる基準位置から交換機構による工具交換の完了前の接触位置に主軸ヘッドが到達したか否かを判断する(S22)。CPUは、接触位置に主軸ヘッドが到達したと判断した場合、供給手段による流体のノズルへの供給を停止する(S23)。
【選択図】図5
特許請求の範囲
【請求項1】
工具を保持する工具ホルダを収納する工具マガジンと、
前記工具ホルダのテーパ部が嵌る装着穴を備えた軸であり且つ特定方向に延びた主軸と、
前記主軸を回転可能に支持する主軸ヘッドと、
前記主軸に装着した前記工具ホルダが保持する工具である現工具を、前記工具マガジンに収納した前記工具ホルダが保持する工具である次工具に交換する工具交換を行う交換機構と、
前記主軸ヘッドに設け、前記次工具の前記工具ホルダに向けて流体を噴出するノズルと、
前記ノズルに前記流体を供給する供給手段と
を備えた工作機械を制御する数値制御装置において、
前記交換機構による前記工具交換時、前記工具ホルダの前記テーパ部が前記装着穴に嵌るように、前記主軸ヘッドと前記次工具とを前記特定方向に相対移動する移動制御部と、
前記移動制御部による相対移動時、前記供給手段により前記ノズルに前記流体を供給することで、前記次工具を取り付けた前記工具ホルダに向けて前記ノズルから前記流体を噴出する噴出制御部と、
前記工具ホルダの前記テーパ部に前記流体が当たらなくなる基準位置から前記交換機構による前記工具交換の完了前の位置の特定範囲に前記主軸ヘッドが到達したか否かを判断する判断部と
を備え、
前記噴出制御部は、前記判断部が前記特定範囲内に前記主軸ヘッドが到達したと判断した場合、前記供給手段による前記流体の前記ノズルへの供給を停止する供給停止処理を実行する
ことを特徴とする数値制御装置。
続きを表示(約 3,200 文字)
【請求項2】
前記工作機械は、前記主軸ヘッドと前記次工具の前記工具ホルダとの相対位置を検出する検出部を備え、
前記判断部は、前記検出部による検出結果に基づいて前記特定範囲内に前記主軸ヘッドが到達したかを判断する
ことを特徴とする請求項1に記載の数値制御装置。
【請求項3】
前記工作機械は、前記特定方向に向けて前記主軸ヘッドを移動する移動機構を備え、
前記移動制御部は、前記移動機構を制御して、前記特定方向において前記主軸ヘッドを前記次工具へ向けて移動する
ことを特徴とする請求項2に記載の数値制御装置。
【請求項4】
前記移動機構は、前記主軸ヘッドを前記特定方向へ移動するモータを備え、
前記検出部は、前記モータの回転位置を検出するエンコーダである
ことを特徴とする請求項3に記載の数値制御装置。
【請求項5】
前記判断部は、前記工具交換の経過時間に基づいて前記特定範囲に前記主軸ヘッドが到達したかを判断する
ことを特徴とする請求項1に記載の数値制御装置。
【請求項6】
工具を保持する工具ホルダを収納する工具マガジンと、
前記工具ホルダのテーパ部が嵌る装着穴を備えた軸であり且つ特定方向に延びた主軸と、
前記主軸を回転可能に支持する主軸ヘッドと、
前記主軸に装着した前記工具ホルダが保持する工具である現工具を、前記工具マガジンに収納した前記工具ホルダが保持する工具である次工具に交換する工具交換を行う交換機構と、
前記主軸ヘッドに設け、前記次工具の前記工具ホルダに向けて流体を噴出するノズルと、
前記ノズルに前記流体を供給する供給手段と
を備えた工作機械において、
前記交換機構による前記工具交換時、前記工具ホルダの前記テーパ部が前記装着穴に嵌るように、前記主軸ヘッドと前記次工具とを前記特定方向に相対移動する移動制御部と、
前記移動制御部による相対移動時、前記供給手段により前記ノズルに前記流体を供給することで、前記次工具を取り付けた前記工具ホルダに向けて前記ノズルから前記流体を噴出する噴出制御部と、
前記工具ホルダの前記テーパ部に前記流体が当たらなくなる基準位置から前記交換機構による前記工具交換の完了前の位置の特定範囲に前記主軸ヘッドが到達したか否かを判断する判断部と
を備え、
前記噴出制御部は、前記判断部が前記特定範囲内に前記主軸ヘッドが到達したと判断した場合、前記供給手段による前記流体の前記ノズルへの供給を停止する供給停止処理を実行する
ことを特徴とする工作機械。
【請求項7】
工具を保持する工具ホルダを収納する工具マガジンと、
前記工具ホルダのテーパ部が嵌る装着穴を備えた軸であり且つ特定方向に延びた主軸と、
前記主軸を回転可能に支持する主軸ヘッドと、
前記主軸に装着した前記工具ホルダが保持する工具である現工具を、前記工具マガジンに収納した前記工具ホルダが保持する工具である次工具に交換する工具交換を行う交換機構と、
前記主軸ヘッドに設け、前記次工具の前記工具ホルダに向けて流体を噴出するノズルと、
前記ノズルに前記流体を供給する供給手段と
を備えた工作機械を制御する数値制御装置の制御方法において、
前記交換機構による前記工具交換時、前記工具ホルダの前記テーパ部が前記装着穴に嵌るように、前記主軸ヘッドと前記次工具とを前記特定方向に相対移動する移動制御ステップと、
前記移動制御ステップによる相対移動時、前記供給手段により前記ノズルに前記流体を供給することで、前記次工具を取り付けた前記工具ホルダに向けて前記ノズルから前記流体を噴出する噴出制御ステップと、
前記工具ホルダの前記テーパ部に前記流体が当たらなくなる基準位置から前記交換機構による前記工具交換の完了前の位置の特定範囲に前記主軸ヘッドが到達したか否かを判断する判断ステップと
を備え、
前記噴出制御ステップは、前記判断ステップで前記特定範囲内に前記主軸ヘッドが到達したと判断した場合、前記供給手段による前記流体の前記ノズルへの供給を停止する供給停止処理を実行する
ことを特徴とする制御方法。
【請求項8】
工具を保持する工具ホルダを収納する工具マガジンと、
前記工具ホルダのテーパ部が嵌る装着穴を備えた軸であり且つ特定方向に延びた主軸と、
前記主軸を回転可能に支持する主軸ヘッドと、
前記主軸に装着した前記工具ホルダが保持する工具である現工具を、前記工具マガジンに収納した前記工具ホルダが保持する工具である次工具に交換する工具交換を行う交換機構と、
前記主軸ヘッドに設け、前記次工具の前記工具ホルダに向けて流体を噴出するノズルと、
前記ノズルに前記流体を供給する供給手段と、
を備えた工作機械を制御する数値制御装置のコンピュータに、
前記交換機構による前記工具交換時、前記工具ホルダの前記テーパ部が前記装着穴に嵌るように、前記主軸ヘッドと前記次工具とを前記特定方向に相対移動する移動制御ステップと、
前記移動制御ステップによる相対移動時、前記供給手段により前記ノズルに前記流体を供給することで、前記次工具を取り付けた前記工具ホルダに向けて前記ノズルから前記流体を噴出する噴出制御ステップと、
前記工具ホルダの前記テーパ部に前記流体が当たらなくなる基準位置から前記交換機構による前記工具交換の完了前の位置の特定範囲に前記主軸ヘッドが到達したか否かを判断する判断ステップと
を実行させ、
前記噴出制御ステップは、前記判断ステップで前記特定範囲内に前記主軸ヘッドが到達したと判断した場合、前記供給手段による前記流体の前記ノズルへの供給を停止する供給停止処理を実行する
ことを特徴とするプログラム。
【請求項9】
工具を保持する工具ホルダを収納する工具マガジンと、
前記工具ホルダのテーパ部が嵌る装着穴を備えた軸であり且つ特定方向に延びた主軸と、
前記主軸を回転可能に支持する主軸ヘッドと、
前記主軸に装着した前記工具ホルダが保持する工具である現工具を、前記工具マガジンに収納した前記工具ホルダが保持する工具である次工具に交換する工具交換を行う交換機構と、
前記主軸ヘッドに設け、前記次工具の前記工具ホルダに向けて流体を噴出するノズルと、
前記ノズルに前記流体を供給する供給手段と、
を備えた工作機械を制御する数値制御装置のコンピュータに、
前記交換機構による前記工具交換時、前記工具ホルダの前記テーパ部が前記装着穴に嵌るように、前記主軸ヘッドと前記次工具とを前記特定方向に相対移動する移動制御ステップと、
前記移動制御ステップによる相対移動時、前記供給手段により前記ノズルに前記流体を供給することで、前記次工具を取り付けた前記工具ホルダに向けて前記ノズルから前記流体を噴出する噴出制御ステップと、
前記工具ホルダの前記テーパ部に前記流体が当たらなくなる基準位置から前記交換機構による前記工具交換の完了前の位置の特定範囲に前記主軸ヘッドが到達したか否かを判断する判断ステップと
を実行させるプログラムを記憶した記憶媒体であって、
前記噴出制御ステップは、前記判断ステップで前記特定範囲内に前記主軸ヘッドが到達したと判断した場合、前記供給手段による前記流体の前記ノズルへの供給を停止する供給停止処理を実行する
ことを特徴とする記憶媒体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、数値制御装置、工作機械、制御方法、プログラム、及び記憶媒体に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
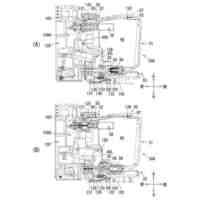
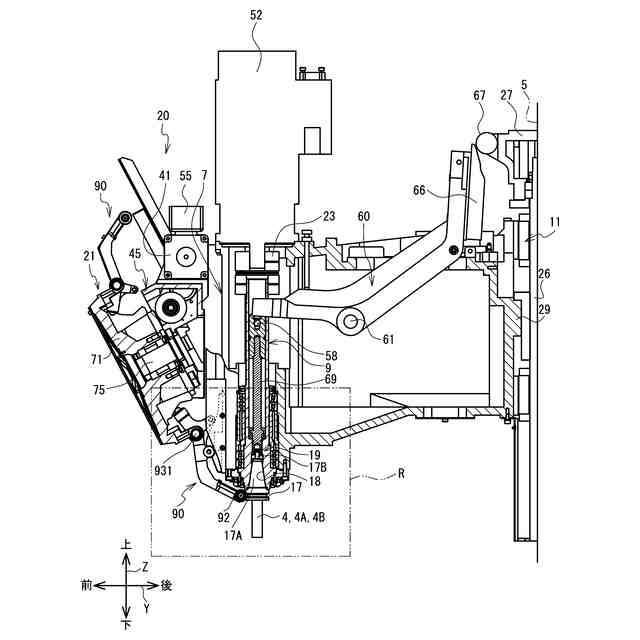
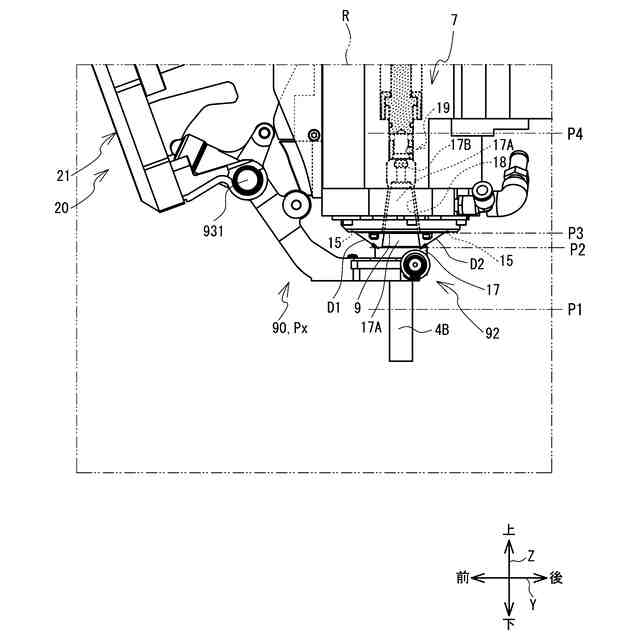
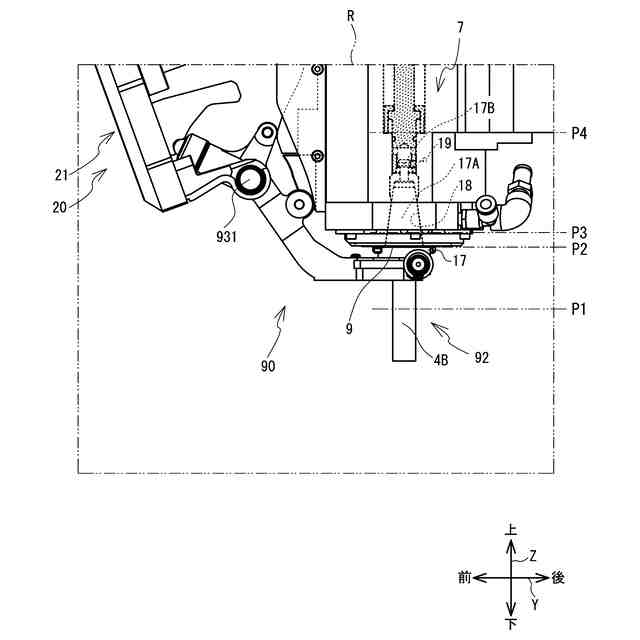
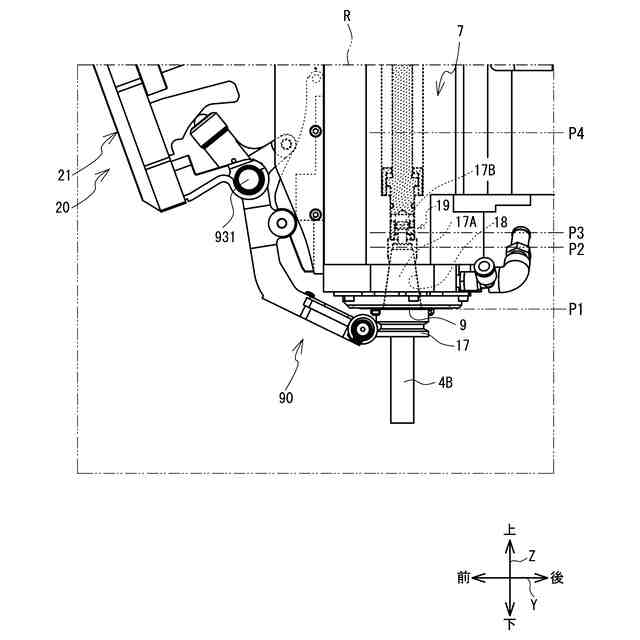
特許文献1に記載の工作機械は、加工精度の低下を防止するため、主軸に装着する工具を取り付けた工具ホルダのテーパ部の洗浄を工具交換時に実行する。工具交換時、工作機械は、ATC原点からZ軸原点に向けて主軸ヘッドを移動する。該時、工作機械は、所定の洗浄位置を通過する工具ホルダへ向けてノズルから洗浄液を噴出する。工具ホルダのテーパ部の全部が洗浄位置を通過後、主軸ヘッドがZ軸原点に到達し、工具ホルダのテーパ部が主軸の装着穴に装着する。該時、工作機械は、ノズルからの洗浄液の噴出を停止する。
【先行技術文献】
【特許文献】
【0003】
特開2010-234471号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記工作機械は、工具ホルダのテーパ部が洗浄位置を通過した後も、主軸ヘッドがZ軸原点に到達するまで、工具ホルダのテーパ部以外の部分への洗浄液の噴出を継続する。故に、工作機械は、洗浄液を必要以上に消費するという問題がある。洗浄液に限らず、エア等の流体についても同様に、必要以上に消費する可能性がある。
【0005】
本発明の目的は、工具ホルダのテーパ部を洗浄する能力を維持し、工具ホルダを洗浄する為の流体の消費を抑制できる数値制御装置、工作機械、制御方法、プログラム、及び記憶媒体を提供することである。
【課題を解決するための手段】
【0006】
請求項1の数値制御装置は、工具を保持する工具ホルダを収納する工具マガジンと、前記工具ホルダのテーパ部が嵌る装着穴を備えた軸であり且つ特定方向に延びた主軸と、前記主軸を回転可能に支持する主軸ヘッドと、前記主軸に装着した前記工具ホルダが保持する工具である現工具を、前記工具マガジンに収納した前記工具ホルダが保持する工具である次工具に交換する工具交換を行う交換機構と、前記主軸ヘッドに設け、前記次工具の前記工具ホルダに向けて流体を噴出するノズルと、前記ノズルに前記流体を供給する供給手段とを備えた工作機械を制御する数値制御装置において、前記交換機構による前記工具交換時、前記工具ホルダの前記テーパ部が前記装着穴に嵌るように、前記主軸ヘッドと前記次工具とを前記特定方向に相対移動する移動制御部と、前記移動制御部による相対移動時、前記供給手段により前記ノズルに前記流体を供給することで、前記次工具を取り付けた前記工具ホルダに向けて前記ノズルから前記流体を噴出する噴出制御部と、前記工具ホルダの前記テーパ部に前記流体が当たらなくなる基準位置から前記交換機構による前記工具交換の完了前の位置の特定範囲に前記主軸ヘッドが到達したか否かを判断する判断部とを備え、前記噴出制御部は、前記判断部が前記特定範囲内に前記主軸ヘッドが到達したと判断した場合、前記供給手段による前記流体の前記ノズルへの供給を停止する供給停止処理を実行することを特徴とする。
【0007】
上記数値制御装置は、特定範囲内で供給手段による流体のノズルへの供給を停止するので、工具ホルダのテーパ部以外の部分への流体の噴出を抑制できる。故に、数値制御装置は、工具ホルダのテーパ部を洗浄する能力を維持し、工具ホルダを洗浄する為の流体の消費を抑制できる。
【0008】
請求項2の数値制御装置では、前記工作機械は、前記主軸ヘッドと前記次工具の前記工具ホルダとの相対位置を検出する検出部を備え、前記判断部は、前記検出部による検出結果に基づいて前記特定範囲内に前記主軸ヘッドが到達したかを判断してもよい。数値制御装置は、検出部により相対位置を検出するので、経過時間で判断する場合に比して、相対位置を正確に検出できる。数値制御装置は、検出部による検出結果に基づいてノズルへの流体の供給を停止すればよいので、流体の供給停止時期を制御しやすい。
【0009】
請求項3の数値制御装置では、前記工作機械は、前記特定方向に向けて前記主軸ヘッドを移動する移動機構を備え、前記移動制御部は、前記移動機構を制御して、前記特定方向において前記主軸ヘッドを前記次工具へ向けて移動してもよい。数値制御装置は、主軸ヘッドを特定方向に移動して工具交換する工作機械においても、工具ホルダのテーパ部を洗浄する能力を維持し、工具ホルダを洗浄する為の流体の消費を抑制できる。
【0010】
請求項4の数値制御装置では、前記移動機構は、前記主軸ヘッドを前記特定方向へ移動するモータを備え、前記検出部は、前記モータの回転位置を検出するエンコーダであってもよい。数値制御装置は、エンコーダの検出結果に基づき停止位置を検出できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ブラザー工業株式会社
サーバ
13日前
ブラザー工業株式会社
ミシン
12日前
ブラザー工業株式会社
プリンタ
2日前
ブラザー工業株式会社
プリンタ
6日前
ブラザー工業株式会社
プリンタ
14日前
ブラザー工業株式会社
給送装置
12日前
ブラザー工業株式会社
プリンタ
6日前
ブラザー工業株式会社
液体容器
6日前
ブラザー工業株式会社
プリンタ
6日前
ブラザー工業株式会社
インク容器
6日前
ブラザー工業株式会社
インク容器
6日前
ブラザー工業株式会社
インク容器
6日前
ブラザー工業株式会社
インク容器
6日前
ブラザー工業株式会社
インク容器
6日前
ブラザー工業株式会社
画像形成装置
13日前
ブラザー工業株式会社
情報処理装置
12日前
ブラザー工業株式会社
画像形成装置
5日前
ブラザー工業株式会社
走査光学装置
6日前
ブラザー工業株式会社
画像記録装置
12日前
ブラザー工業株式会社
画像形成装置
6日前
ブラザー工業株式会社
画像形成装置
13日前
ブラザー工業株式会社
画像形成装置
13日前
ブラザー工業株式会社
画像形成装置
5日前
ブラザー工業株式会社
画像形成装置
6日前
ブラザー工業株式会社
画像記録装置
12日前
ブラザー工業株式会社
画像記録装置
12日前
ブラザー工業株式会社
ドラムユニット
20日前
ブラザー工業株式会社
ドラムユニット
20日前
ブラザー工業株式会社
ラベルプリンタ
6日前
ブラザー工業株式会社
液体カートリッジ
6日前
ブラザー工業株式会社
液体カートリッジ
6日前
ブラザー工業株式会社
情報処理システム
13日前
ブラザー工業株式会社
配信情報提供サーバ
13日前
ブラザー工業株式会社
プログラム、情報機器
13日前
ブラザー工業株式会社
トレイ及び画像記録装置
12日前
ブラザー工業株式会社
インク容器およびシステム
6日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ