TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025019862
公報種別
公開特許公報(A)
公開日
2025-02-07
出願番号
2023123728
出願日
2023-07-28
発明の名称
電動車両の制御方法、及び電動車両の制御システム
出願人
日産自動車株式会社
代理人
弁理士法人後藤特許事務所
主分類
B60L
15/20 20060101AFI20250131BHJP(車両一般)
要約
【課題】4輪駆動の電動車両においてスリップ制御を高精度に実行可能な電動車両の制御方法を提供する。
【解決手段】前輪22を駆動させるモータと、後輪32を駆動させるモータを搭載した電動車両100の加速時において、前輪22及び後輪32の車輪速度が電動車両100の基本車体速度に所定の目標スリップ量を加算して得られる目標車輪速度に追従するように各モータをスリップ制御する電動車両100の制御方法であって、前輪22及び後輪32のうち最も車輪速度の低い駆動輪の車輪速度を第1推定車体速度に設定し、電動車両100の加速度に基づいて第2推定車体速度を算出し、第1推定車体速度及び第2推定車体速度のうち値が低い方を基本車体速度に設定し、さらに前輪22及び後輪32の車輪速度が目標車輪速度から高速回転側に逸脱する場合に、第2推定車体速度を基本車体速度に設定する。
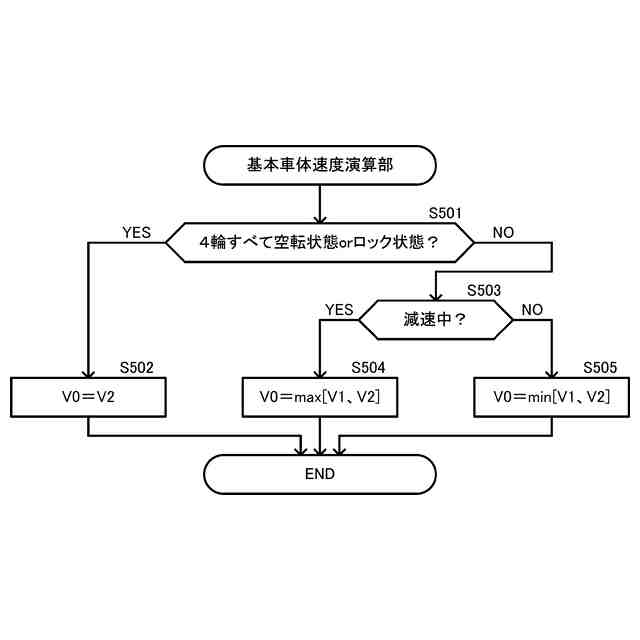
【選択図】図8
特許請求の範囲
【請求項1】
一対の第1の駆動輪を駆動させる第1の駆動モータと、一対の第2の駆動輪を駆動させる第2の駆動モータを搭載した電動車両の加速時において、前記第1の駆動輪の車輪速度が前記電動車両の基本車体速度に所定の第1の目標スリップ量を加算して得られる第1の目標車輪速度に追従するように前記第1の駆動モータをスリップ制御し、且つ前記第2の駆動輪の車輪速度が前記基本車体速度に所定の第2の目標スリップ量を加算して得られる第2の目標車輪速度に追従するように前記第2の駆動モータをスリップ制御する電動車両の制御方法であって、
前記第1の駆動輪及び前記第2の駆動輪のうち最も車輪速度の低い駆動輪の車輪速度を第1推定車体速度に設定し、
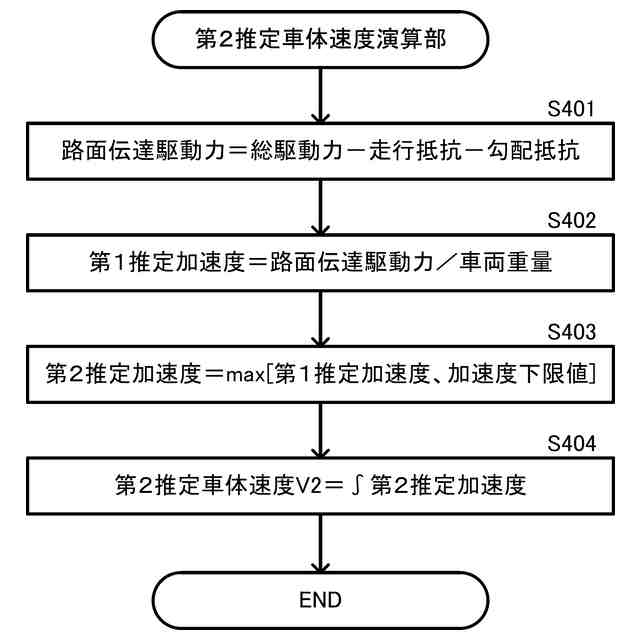
前記電動車両の加速度に基づいて第2推定車体速度を算出し、
前記第1推定車体速度及び前記第2推定車体速度のうち値が低い方を前記基本車体速度に設定し、さらに前記第1の駆動輪の車輪速度が前記第1の目標車輪速度から高速回転側に逸脱し且つ前記第2の駆動輪の車輪速度が前記第2の目標車輪速度から高速回転側に逸脱する場合に、前記第2推定車体速度を前記基本車体速度に設定する電動車両の制御方法。
続きを表示(約 2,600 文字)
【請求項2】
一対の第1の駆動輪を駆動させる第1の駆動モータと、一対の第2の駆動輪を駆動させる第2の駆動モータを搭載した電動車両の加速時において、前記第1の駆動輪の車輪速度が前記電動車両の基本車体速度に所定の第1の目標スリップ量を加算して得られる第1の目標車輪速度に追従するように前記第1の駆動モータをスリップ制御し、且つ前記第2の駆動輪の車輪速度が前記基本車体速度に所定の第2の目標スリップ量を加算して得られる第2の目標車輪速度に追従するように前記第2の駆動モータをスリップ制御する電動車両の制御方法であって、
前記第1の駆動輪及び前記第2の駆動輪のうち最も車輪速度が値の低い駆動輪の車輪速度を第1推定車体速度として選択するとともに前記第1推定車体速度を前記基本車体速度に設定し、さらに前記第1の駆動輪の車輪速度が前記第1の目標車輪速度から高速回転側に逸脱し且つ前記第2の駆動輪の車輪速度が前記第2の目標車輪速度から高速回転側に逸脱する場合に、前記電動車両の加速度に基づいて第2推定車体速度を算出するするとともに前記第2推定車体速度を前記基本車体速度に設定する電動車両の制御方法。
【請求項3】
前記電動車両の減速時において、前記第1の駆動輪の車輪速度が前記基本車体速度から所定の第3の目標スリップ量を減算して得られる第3の目標車輪速度に追従するように前記第1の駆動モータをスリップ制御し、且つ前記第2の駆動輪の車輪速度が前記基本車体速度から所定の第4の目標スリップ量を減算して得られる第4の目標車輪速度に追従するように前記第2の駆動モータをスリップ制御する場合において、
前記第1の駆動輪及び前記第2の駆動輪のうち最も車輪速度の高い駆動輪の車輪速度を前記第1推定車体速度に設定し、
前記第1推定車体速度及び前記第2推定車体速度のうち値が高い方を前記基本車体速度に設定し、さらに前記第1の駆動輪の車輪速度が前記第3の目標車輪速度から低速回転側に逸脱し且つ前記第2の駆動輪の車輪速度が前記第4の目標車輪速度から低速回転側に逸脱する場合に前記第2推定車体速度を前記基本車体速度に設定する請求項1に記載の電動車両の制御方法。
【請求項4】
前記電動車両の減速時において、前記第1の駆動輪の車輪速度が前記基本車体速度から所定の第3の目標スリップ量を減算して得られる第3の目標車輪速度に追従するように前記第1の駆動モータをスリップ制御し、且つ前記第2の駆動輪の車輪速度が前記基本車体速度から所定の第4の目標スリップ量を減算して得られる第4の目標車輪速度に追従するように前記第2の駆動モータをスリップ制御する場合において、
前記第1の駆動輪及び前記第2の駆動輪のうち最も車輪速度の高い駆動輪の車輪速度を前記第1推定車体速度に設定し、
前記第1推定車体速度及び前記第2推定車体速度のうち値が高い方を前記基本車体速度に設定し、さらに前記第1の駆動輪の車輪速度が前記第3の目標車輪速度から低速側に逸脱し且つ前記第2の駆動輪の車輪速度が前記第4の目標車輪速度から低速側に逸脱する場合に前記電動車両の加速度に基づいて前記第2推定車体速度を算出するするとともに前記第2推定車体速度を前記基本車体速度に設定する請求項2に記載の電動車両の制御方法。
【請求項5】
前記電動車両の加速度を、トルク指令値に基づいて駆動する前記第1の駆動モータ及び前記第2の駆動モータの総駆動力と、前記電動車両が走行する路面の勾配抵抗と、前記電動車両の重量と、に基づいて算出する請求項1から請求項4のいずれか1項に記載の電動車両の制御方法。
【請求項6】
力を検知する加速度センサが前記電動車両に搭載されている場合において、
前記電動車両の加速中において、前記加速度センサが検知した検知量と、前記第1の駆動輪及び前記第2の駆動輪のうち前記車輪速度が低い方の駆動輪の当該車輪速度の変化量と、前記電動車両の重量とに基づいて前記勾配抵抗を算出し、
前記電動車両の減速中において、前記検知量と、前記第1の駆動輪及び前記第2の駆動輪のうち前記車輪速度が高い方の駆動輪の当該車輪速度の前記変化量と、前記電動車両の重量とに基づいて前記勾配抵抗を算出する請求項5に記載の電動車両の制御方法。
【請求項7】
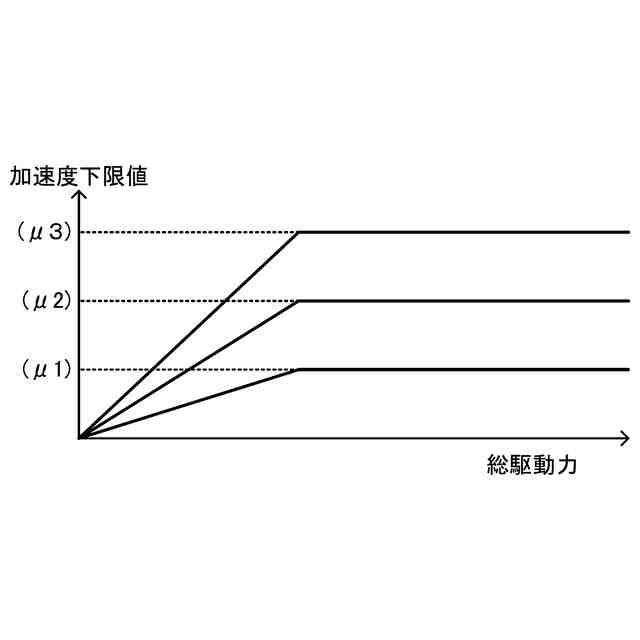
前記総駆動力に対応する前記電動車両の加速度の絶対値の下限値を設定し、
前記総駆動力に対応する前記電動車両の加速度が前記下限値以上となるように設定する請求項5に記載の電動車両の制御方法。
【請求項8】
前記第1の駆動輪の車輪速度が前記第1の目標車輪速度から高速回転側に逸脱し且つ前記第2の駆動輪の車輪速度が前記第2の目標車輪速度から高速回転側に逸脱した空転状態になるときの前記電動車両の加速度を、前記空転状態となる直前の前記勾配抵抗に基づいて算出し、
前記第1の駆動輪の車輪速度が前記第1の目標車輪速度から低速回転側に逸脱し且つ前記第2の駆動輪の車輪速度が前記第2の目標車輪速度から低速回転側に逸脱したロック状態になるときの前記電動車両の加速度を、前記ロック状態となる直前の前記勾配抵抗に基づいて算出する請求項5に記載の電動車両の制御方法。
【請求項9】
前記第2推定車体速度と前記第1推定車体速度との差分が所定の閾値を超えると前記第2推定車体速度を前記第1推定車体速度の値により更新する請求項1又は請求項2に記載の電動車両の制御方法。
【請求項10】
前記第1の駆動輪の車輪速度が前記第1の目標車輪速度から高速回転側に逸脱し且つ前記第2の駆動輪の車輪速度が前記第2の目標車輪速度から高速回転側に逸脱した空転状態が解消したときに前記第2推定車体速度を前記空転状態の解消後の前記第1推定車体速度の値により更新し、
前記第1の駆動輪の車輪速度が前記第1の目標車輪速度から低速回転側に逸脱し且つ前記第2の駆動輪の車輪速度が前記第2の目標車輪速度から低速回転側に逸脱したロック状態が解消したときに前記第2推定車体速度を前記ロック状態の解消後の前記第1推定車体速度の値により更新する請求項1から請求項4のいずれか1項に記載の電動車両の制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動車両の制御方法、及び電動車両の制御システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1は、4輪駆動の車両において、車輪速度が急上昇した場合、又は車輪速度が車両本体の速度から乖離した場合に車輪のスリップを判定する内容を開示している。
【先行技術文献】
【特許文献】
【0003】
特開平10-181564号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1では、4輪の駆動輪のうち所定の条件に基づいていずれかの駆動輪を選択し当該駆動輪の車輪速度に基づいて車両本体の速度を算出するため、4輪ともスリップしている場合に駆動輪の車輪速度に基づいて設定されるスリップ判定用の基本車体速度が実際の車両の速度と乖離し、スリップ制御(トルク制限)を高精度に実行することが困難となる。
【0005】
本発明は、4輪駆動の電動車両においてスリップ制御(トルク制限)を高精度に実行可能な電動車両の制御方法、及び電動車両の制御システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明による電動車両の制御方法は、一対の第1の駆動輪を駆動させる第1の駆動モータと、一対の第2の駆動輪を駆動させる第2の駆動モータを搭載した電動車両の加速時において、第1の駆動輪の車輪速度が電動車両の基本車体速度に所定の第1のスリップ量を加算して得られる第1の目標車輪速度に追従するように第1の駆動モータをスリップ制御し、且つ第2の駆動輪の車輪速度が基本車体速度に所定の第2のスリップ量を加算して得られる第2の目標車輪速度に追従するように第2の駆動モータをスリップ制御する電動車両の制御方法である。この制御方法では、第1の駆動輪及び前記第2の駆動輪のうち最も車輪速度の低い駆動輪の当該車輪速度を第1推定車体速度に設定する。また、電動車両の加速度に基づいて第2推定車体速度を算出する。そして、第1推定車体速度及び第2推定車体速度のうち値が低い方を基本車体速度に設定し、さらに第1の駆動輪の車輪速度が第1の目標車輪速度から逸脱し且つ第2の駆動輪の車輪速度が第2の目標車輪速度から逸脱した場合に、第2推定車体速度を基本車体速度に設定する。
【発明の効果】
【0007】
本発明によれば、第1推定車体速度と第2推定車体速度を条件に応じて適宜選択することで基本車体速度を高精度に算出し、当該基本車体速度に基づいてスリップ制御(トルク制限)を実行するので、電動車両の加速時において高精度なスリップ制御が可能となる。
【図面の簡単な説明】
【0008】
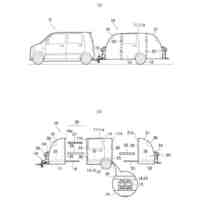
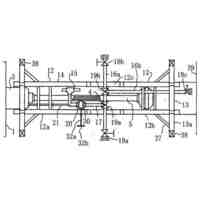
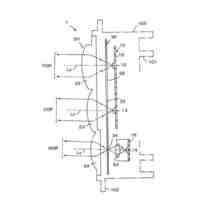
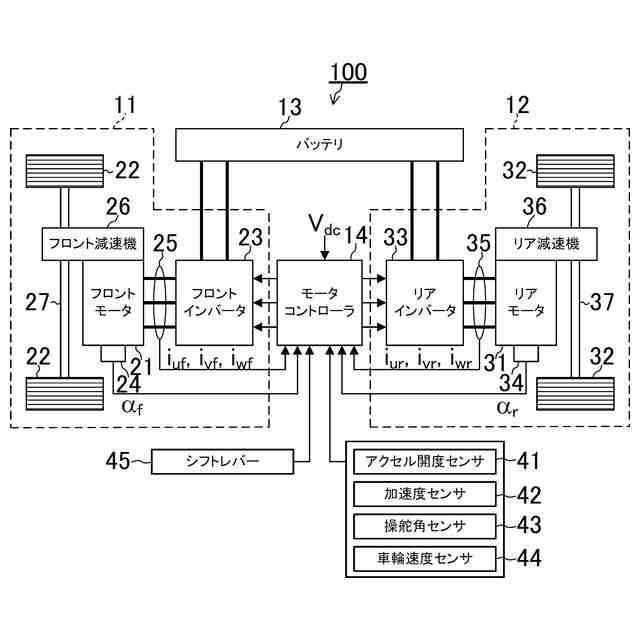
図1は、本実施形態の電動車両の制御システムが適用される電動車両のシステム構成を示す図である。
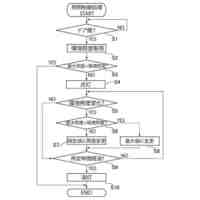
図2は、モータコントローラによって行われる処理の流れを示すフローチャートである。
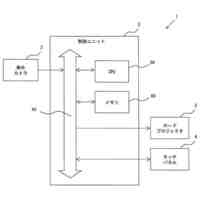
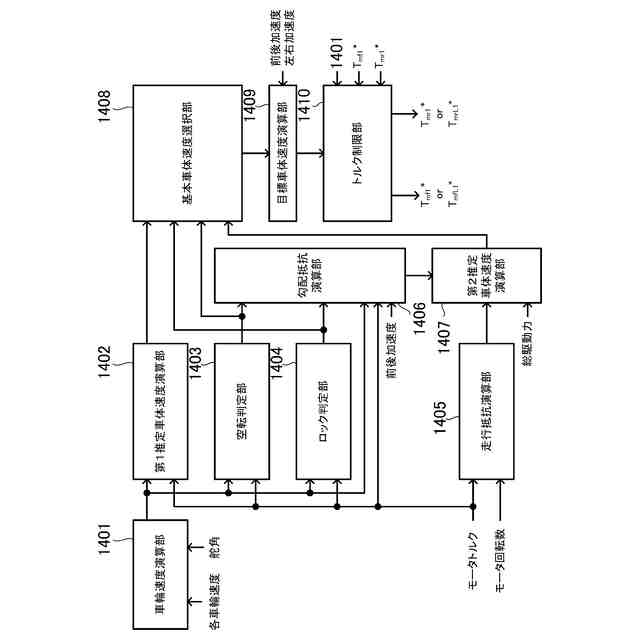
図3は、モータコントローラにおいてトルク制限を実行するためのブロック図である。
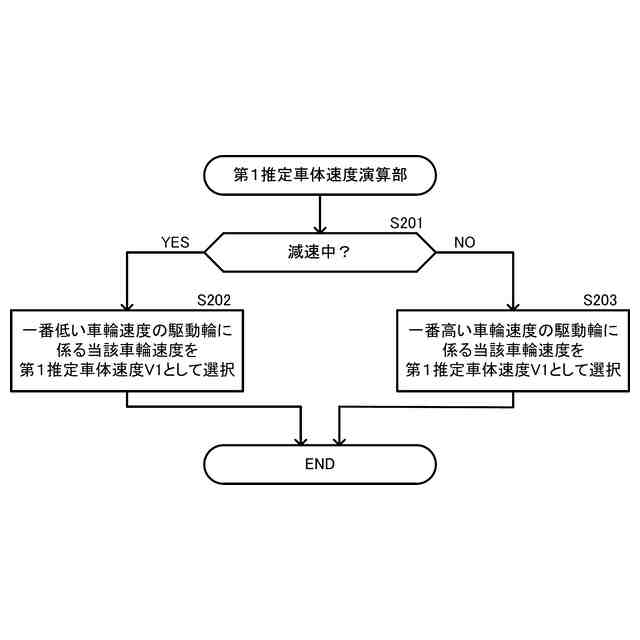
図4は、第1推定車体速度演算部の制御フローである。
図5は、勾配抵抗演算部の制御フローである。
図6は、第2推定車体速度演算部の制御フローである。
図7は、電動車両の総駆動力と、第2推定車体速度の算出に用いられる電動車両の加速度の下限値と、の関係を示すマップである。
図8は、基本車体速度選択部の制御フローである。
図9は、目標車輪速度演算部の制御フローである。
図10は、トルク制限部の制御フローである。
図11は、比較例のスリップ制御であって車両の加速中に駆動輪が空転状態となる場合のタイムチャートである。
図12は、比較例のスリップ制御であって車両の減速中に駆動輪がロック状態となる場合のタイムチャートである。
【発明を実施するための形態】
【0009】
以下、添付図面を参照しながら本発明の実施形態について説明する。
【0010】
図1は、本実施形態の電動車両100の制御装置が適用される電動車両100のシステム構成を示す図である。電動車両100は、複数の駆動輪と、複数の駆動輪のそれぞれに駆動力を生じさせる複数の電動機と、を備える電動車両100である。本実施形態においては、電動車両100はいわゆる四輪駆動車両であって、駆動輪である前輪22及び後輪32と、これらの駆動輪のそれぞれに制駆動力を生じさせるフロントモータ21及びリアモータ31と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
25日前
個人
授乳用車両
1か月前
個人
眼科手術車
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
3か月前
日本精機株式会社
表示装置
1日前
日本精機株式会社
表示装置
2日前
日本精機株式会社
照明装置
1日前
日本精機株式会社
表示装置
2日前
日本精機株式会社
表示装置
2日前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
1か月前
個人
台車用車輪止め具
2か月前
個人
キャンピングトレーラー
2か月前
株式会社松華
懸架装置
1日前
日本精機株式会社
車載表示装置
2か月前
個人
謝意シグナル装着車
2か月前
個人
ステージカー
1日前
マツダ株式会社
車両
7日前
マツダ株式会社
車両
1か月前
マツダ株式会社
車両
7日前
株式会社青木製作所
タンクローリ
2か月前
日本精機株式会社
車両用照明装置
29日前
トヨタ自動車株式会社
車両
2か月前
日本精機株式会社
車両用表示装置
1日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
2日前
日本精機株式会社
車両用表示装置
2日前
東レ株式会社
車両用部材の補強方法
3か月前
コイト電工株式会社
座席装置
1日前
株式会社小糸製作所
投影装置
1か月前
豊田合成株式会社
乗員保護装置
1か月前
豊田合成株式会社
乗員保護装置
2か月前
個人
Aピラー死角エリヤ確認用ミラー
7日前
個人
タイヤ洗浄装置の軸受構造
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ