TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025019165
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2024202844,2021142201
出願日
2024-11-21,2021-09-01
発明の名称
自動走行方法、自動走行システム、及び自動走行プログラム
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
A01B
69/00 20060101AFI20250130BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業姿勢及び非作業姿勢を切り替え可能な作業機を備える作業車両における作業不良を抑制することが可能な自動走行方法、自動走行システム、及び自動走行プログラムを提供する。
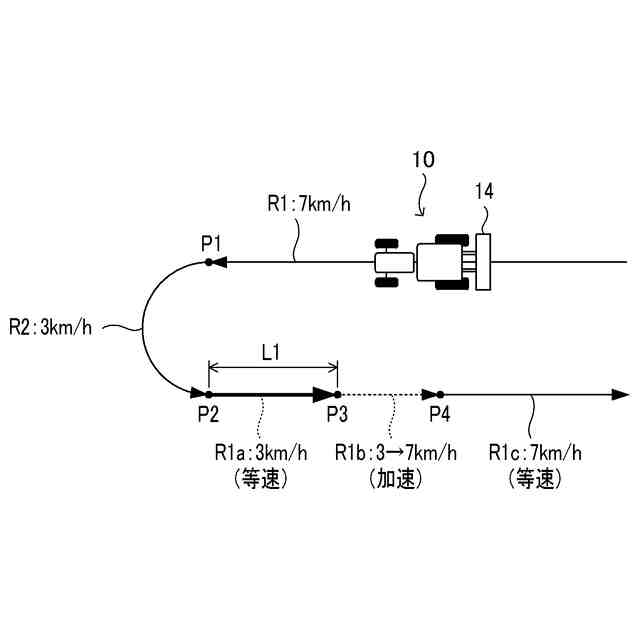
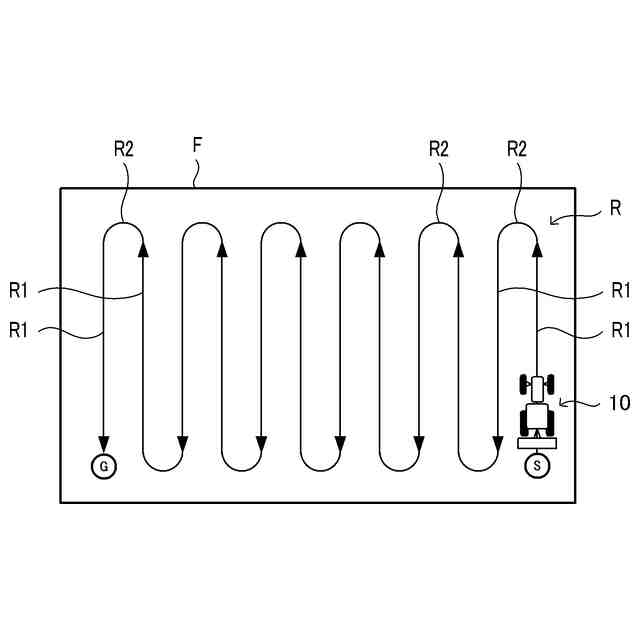
【解決手段】走行処理部111は、直進経路R1において、作業機14を作業姿勢に設定して、作業車両10を第1走行速度で走行させる。走行処理部111は、直進経路R1に接続する旋回半径R2において、作業機14を前記非作業姿勢に設定して、作業車両10を前記第1走行速度よりも低速の第2走行速度で走行させる。走行処理部111は、旋回経路R2の終端位置P2から所定位置P3までの部分経路R1aにおいて、作業機14を前記非作業姿勢から前記作業姿勢に変化させるとともに、作業車両10を前記第1走行速度よりも低速の第3走行速度で走行させる。
【選択図】図8
特許請求の範囲
【請求項1】
作業領域において、所定の作業を行う姿勢である作業姿勢と前記所定の作業を行わない姿勢である非作業姿勢とに切り替え可能な作業機を備える作業車両を目標経路に従って自動走行させる自動走行方法であって、
前記目標経路に含まれる第1作業経路において、前記作業機を前記作業姿勢に設定して、前記作業車両を第1走行速度で走行させることと、
前記目標経路に含まれる前記第1作業経路に接続する非作業経路において、前記作業機を前記非作業姿勢に設定して、前記作業車両を前記第1走行速度よりも低速の第2走行速度で走行させることと、
前記目標経路に含まれる前記非作業経路に接続する第2作業経路のうち、前記非作業経路及び前記第2作業経路の接続位置から所定位置までの第1部分経路において、前記作業機を前記非作業姿勢から前記作業姿勢に変化させるとともに、前記作業車両を前記第1走行速度よりも低速の第3走行速度で走行させることと、
を実行する自動走行方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機により所定の作業を行う作業車両を自動走行させる自動走行方法、自動走行システム、及び自動走行プログラムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、圃場において、作業車両を、所定の作業を行わせながら自動走行させるシステムが知られている。例えば、前記作業車両は昇降可能なロータリー(作業機)を備えており、前記システムは、前記作業車両を目標経路に従って自動走行させながら、作業経路でロータリーを下降させて土壌を耕耘させる(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-103183号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、前記ロータリーは、耕耘作業を行う作業経路(例えば直進経路)において下降し耕耘爪を地中に刺して耕耘作業を行い、耕耘作業を行わない非作業経路(例えば旋回経路)において上昇する。例えば、作業車両が旋回走行している間、前記ロータリーは上昇した位置にあり、作業車両が旋回走行を終了すると、前記ロータリーは下降を開始する。前記ロータリーが下降している間、作業車両は直進経路を自動走行する。この場合、前記ロータリーの耕耘爪が地中の所定深さに到達するまでの間に作業車両は所定距離だけ走行するため、所定距離の走行部分が、適切に耕耘されず作業不良(残耕)になってしまう。このように、従来の技術では、作業時の姿勢(作業姿勢)と非作業時の姿勢(非作業姿勢)とを切り替える作業機の場合、姿勢を切り替える際に作業不良が生じる問題がある。
【0005】
本発明の目的は、作業姿勢及び非作業姿勢を切り替え可能な作業機を備える作業車両における作業不良を抑制することが可能な自動走行方法、自動走行システム、及び自動走行プログラムを提供することにある。
【課題を解決するための手段】
【0006】
本発明に係る自動走行方法は、作業領域において、所定の作業を行う姿勢である作業姿勢と前記所定の作業を行わない姿勢である非作業姿勢とに切り替え可能な作業機を備える作業車両を目標経路に従って自動走行させる方法である。前記自動走行方法は、前記目標経路に含まれる第1作業経路において、前記作業機を前記作業姿勢に設定して、前記作業車両を第1走行速度で走行させることと、前記目標経路に含まれる前記第1作業経路に接続する非作業経路において、前記作業機を前記非作業姿勢に設定して、前記作業車両を前記第1走行速度よりも低速の第2走行速度で走行させることと、前記目標経路に含まれる前記非作業経路に接続する第2作業経路のうち、前記非作業経路及び前記第2作業経路の接続位置から所定位置までの第1部分経路において、前記作業機を前記非作業姿勢から前記作業姿勢に変化させるとともに、前記作業車両を前記第1走行速度よりも低速の第3走行速度で走行させることと、を実行する。
【0007】
本発明に係る自動走行システムは、作業領域において、所定の作業を行う姿勢である作業姿勢と前記所定の作業を行わない姿勢である非作業姿勢とに切り替え可能な作業機を備える作業車両を目標経路に従って自動走行させるシステムである。前記自動走行システムは、第1走行処理部と、第2走行処理部と、第3走行処理部とを備える。前記第1走行処理部は、前記目標経路に含まれる第1作業経路において、前記作業機を前記作業姿勢に設定して、前記作業車両を第1走行速度で走行させる。前記第2走行処理部は、前記目標経路に含まれる前記第1作業経路に接続する非作業経路において、前記作業機を前記非作業姿勢に設定して、前記作業車両を前記第1走行速度よりも低速の第2走行速度で走行させる。前記第3走行処理部は、前記目標経路に含まれる前記非作業経路に接続する第2作業経路のうち、前記非作業経路及び前記第2作業経路の接続位置から所定位置までの第1部分経路において、前記作業機を前記非作業姿勢から前記作業姿勢に変化させるとともに、前記作業車両を前記第1走行速度よりも低速の第3走行速度で走行させる。
【0008】
本発明に係る自動走行プログラムは、作業領域において、所定の作業を行う姿勢である作業姿勢と前記所定の作業を行わない姿勢である非作業姿勢とに切り替え可能な作業機を備える作業車両を目標経路に従って自動走行させるプログラムである。前記自動走行プログラムは、前記目標経路に含まれる第1作業経路において、前記作業機を前記作業姿勢に設定して、前記作業車両を第1走行速度で走行させることと、前記目標経路に含まれる前記第1作業経路に接続する非作業経路において、前記作業機を前記非作業姿勢に設定して、前記作業車両を前記第1走行速度よりも低速の第2走行速度で走行させることと、前記目標経路に含まれる前記非作業経路に接続する第2作業経路のうち、前記非作業経路及び前記第2作業経路の接続位置から所定位置までの第1部分経路において、前記作業機を前記非作業姿勢から前記作業姿勢に変化させるとともに、前記作業車両を前記第1走行速度よりも低速の第3走行速度で走行させることと、を一又は複数のプロセッサーに実行させるためのプログラムである。
【発明の効果】
【0009】
本発明によれば、作業姿勢及び非作業姿勢を切り替え可能な作業機を備える作業車両における作業不良を抑制することが可能な自動走行方法、自動走行システム、及び自動走行プログラムを提供することができる。
【図面の簡単な説明】
【0010】
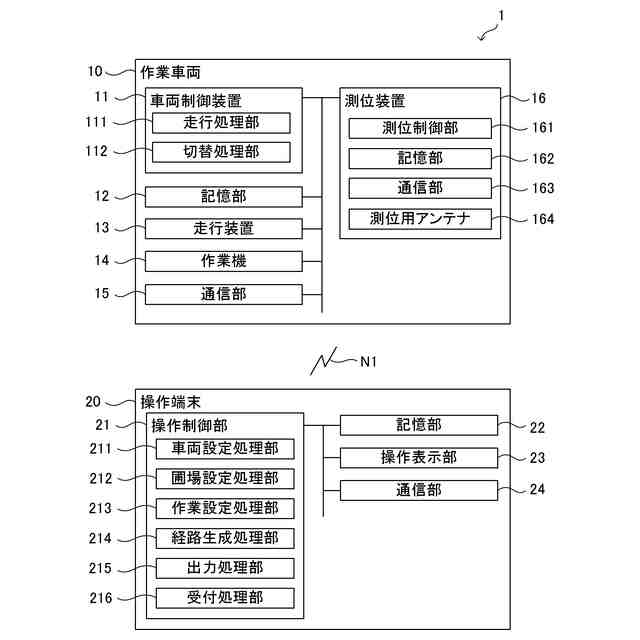
図1は、本発明の実施形態に係る自動走行システムの構成を示すブロック図である。
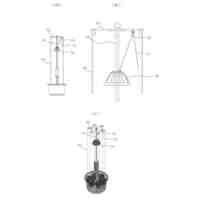
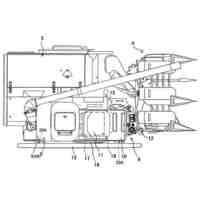
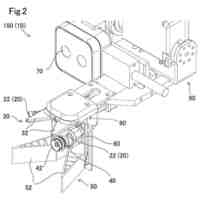
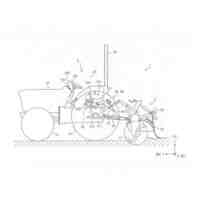
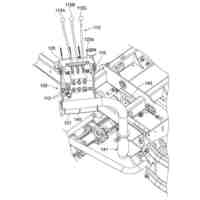
図2は、本発明の実施形態に係る作業車両の一例を示す外観図である。
図3は、本発明の実施形態に係る作業車両の走行経路の一例を示す図である。
図4は、従来の作業車両の走行方法の一例を示す図である。
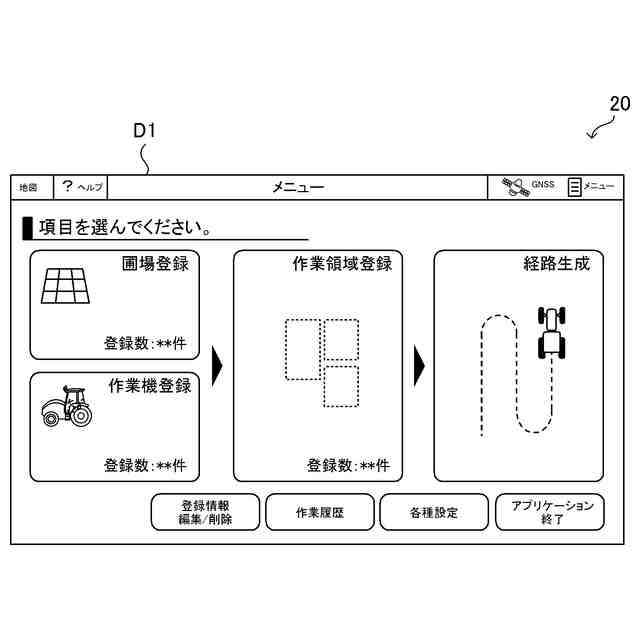
図5は、本発明の実施形態に係る操作端末に表示される操作画面の一例を示す図である。
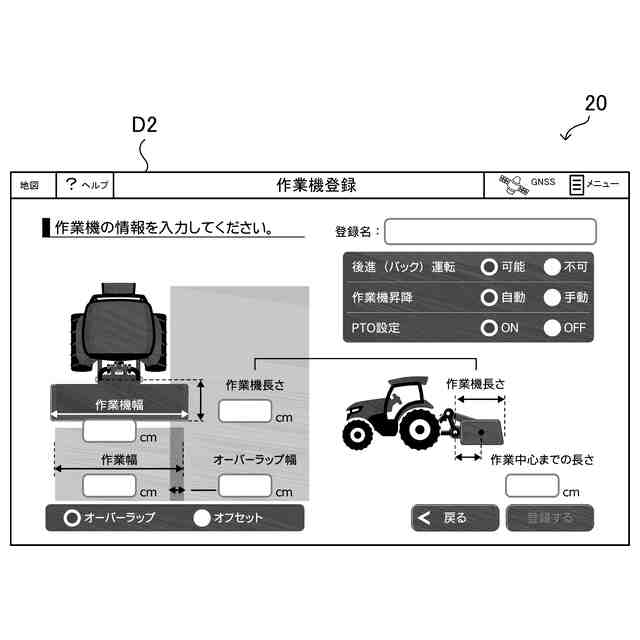
図6は、本発明の実施形態に係る操作端末に表示される操作画面の一例を示す図である。
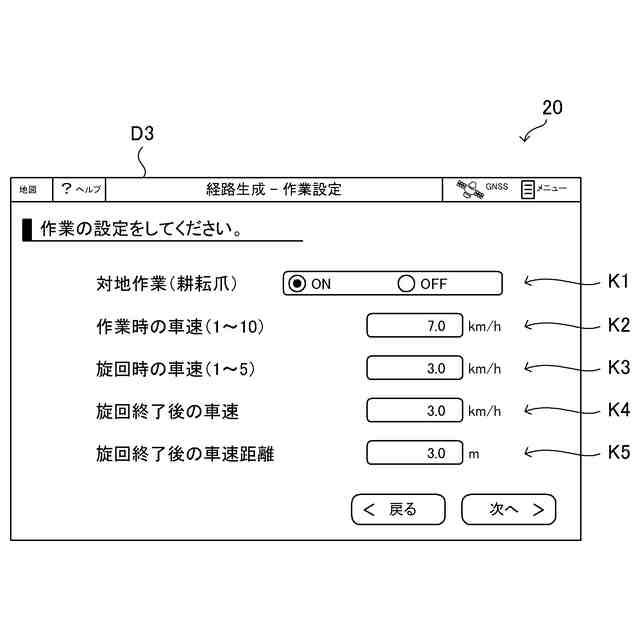
図7は、本発明の実施形態に係る操作端末に表示される操作画面の一例を示す図である。
図8は、本発明の実施形態に係る作業車両の走行方法の一例を示す図である。
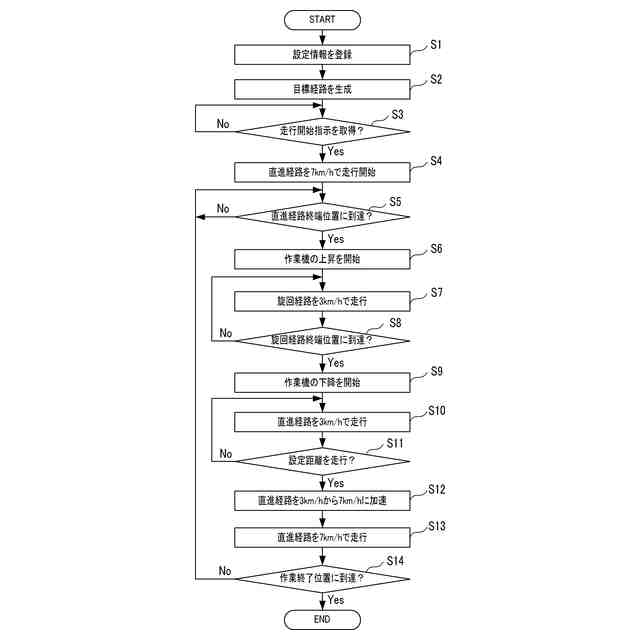
図9は、本発明の実施形態に係る自動走行システムによって実行される自動走行処理の手順の一例を示すフローチャートである。
図10Aは、本発明の実施形態に係る操作端末に表示される操作画面の一例を示す図である。
図10Bは、本発明の実施形態に係る操作端末に表示される操作画面の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
除草具
23日前
個人
ベアスタンガン
23日前
個人
ペット用玩具
20日前
個人
獣罠捕獲検知システム
23日前
個人
植裁物への水やり装置
5日前
個人
根掛りしないイカ用疑似餌
23日前
タキイ種苗株式会社
レタス植物
13日前
株式会社ロッソ
植物栽培器
9日前
株式会社ロッソ
植物栽培器
9日前
株式会社エスク
鳥獣忌避装置
23日前
みのる産業株式会社
移植装置
20日前
個人
ルアー
13日前
株式会社東海化成
ポット保持具
19日前
井関農機株式会社
コンバイン
5日前
AGRIST株式会社
収穫装置
16日前
株式会社クボタ
作業機
6日前
日本製紙クレシア株式会社
ペット用吸収性物品
6日前
株式会社クボタケミックス
弁装置
20日前
株式会社BARKS
ペット収容袋付衣類
6日前
グローブライド株式会社
釣竿ケース
12日前
大日本除蟲菊株式会社
薬剤揮散装置
13日前
株式会社シマノ
ルアー
23日前
株式会社ササキコーポレーション
農作業機
20日前
南京大学
藻類バイオフィルムの高速成膜方法
23日前
株式会社大貴
排泄物処理材及びその製造方法
13日前
株式会社デンソー
潅水システム
19日前
グローブライド株式会社
釣竿用グリップ
6日前
株式会社ヘッドライトジャパン
屋外設置型飛来虫捕獲器
5日前
有限会社太田紙工
ジギング用ハンドルアーム構造
5日前
株式会社横島精密
太陽熱を活用した暖房システム
19日前
個人
海ぶどうの養殖方法及び海ぶどうの養殖装置
23日前
花王株式会社
抗菌剤組成物
19日前
ヤンマーホールディングス株式会社
苗移植機
13日前
井関農機株式会社
作業車両
19日前
三州産業株式会社
蒸熱処理方法および蒸熱処理装置
23日前
株式会社丸山製作所
ブームスプレーヤ
5日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ