TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025018636
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023122525
出願日
2023-07-27
発明の名称
移動体制御システムおよび移動体制御方法
出願人
株式会社日立製作所
代理人
弁理士法人開知
主分類
G05D
1/43 20240101AFI20250130BHJP(制御;調整)
要約
【課題】自律移動体の現場への新規導入の際の負担を軽減することができ、現場への導入を迅速に行うことができる移動体制御システムおよび移動体制御方法を提供すること。
【解決手段】経路形状と制御目標を含む移動ルートを生成する移動先設定部と、移動ルートで使用する制御パラメータを設定するパラメータ設定部と、移動体が過去に自律走行した経路形状と制御目標と制御パラメータとを組み合わせた走行記録を記憶した情報記憶部とを備え、走行記録の経路形状と制御目標を分割した過去ブロックを生成し、同一の制御パラメータを対応させられる類似した過去ブロックにより形成される過去ブロック集合を生成し、移動ルートの経路形状と制御目標を分割した現在ブロックを生成し、現在ブロックと過去ブロック集合の経路形状および制御目標を比較し、現在ブロックと類似した過去ブロック集合に対応した制御パラメータを生成する。
【選択図】 図1
特許請求の範囲
【請求項1】
移動体に移動先を決定し、移動先までの経路形状と制御目標を含む移動ルートを生成する移動先設定部と、
前記移動先設定部で設定された移動ルートで使用する制御パラメータを設定するパラメータ設定部と、
前記移動体が過去に自律走行した経路形状と制御目標と制御パラメータの組合せを少なくとも記録した走行記録を記憶した情報記憶部と、
を備えた移動体制御システムにおいて、
前記パラメータ設定部は、
前記走行記録の経路形状と制御目標を分割した過去ブロックを生成し、
同一の制御パラメータを対応させられる類似した過去ブロックにより形成される過去ブロック集合を生成し、
前記移動ルートの経路形状と制御目標を分割した現在ブロックを生成し、
現在ブロックの経路形状と制御目標と過去ブロック集合の経路形状と制御目標を比較し、
現在ブロックと類似した過去ブロック集合に対応した制御パラメータを生成することを特徴とする移動体制御システム。
続きを表示(約 1,700 文字)
【請求項2】
請求項1記載の移動体制御システムにおいて、
前記パラメータ設定部は、経路形状の道のり距離に対する変化率が一定となった地点で分割したブロックを生成することを特徴とする移動体制御システム。
【請求項3】
請求項1記載の移動体制御システムにおいて、
前記パラメータ設定部は、制御目標の道のり距離に対する変化率が一定となった地点で分割したブロックを生成することを特徴とする移動体制御システム。
【請求項4】
請求項1記載の移動体制御システムにおいて、
前記パラメータ設定部は、単一の過去ブロック集合に含まれるブロックとなった地点で分割したブロックを生成することを特徴とする移動体制御システム。
【請求項5】
請求項1記載の移動体制御システムにおいて、
前記パラメータ設定部は、各現在ブロックの境界前後に緩衝区間を設け、緩衝区間に前後の現在ブロックに生成された制御パラメータを滑らかに接続する制御パラメータを生成することを特徴とする移動体制御システム。
【請求項6】
請求項1記載の移動体制御システムにおいて、
前記パラメータ設定部は、制御目標の達成度を示す評価指標を算出し、同一の制御パラメータで同等の評価指標となる過去ブロックを集めた過去ブロック集合を生成することを特徴とする移動体制御システム。
【請求項7】
請求項1記載の移動体制御システムにおいて、
前記移動体に備えられたアクチュエータの状態量を検出するセンサの検出結果から前記移動体の自己位置を算出する自己位置演算部と、
前記移動先設定部で設定された移動ルートにおいて移動体の挙動を制御する移動体制御部とをさらに備え、
前記移動体制御部は、
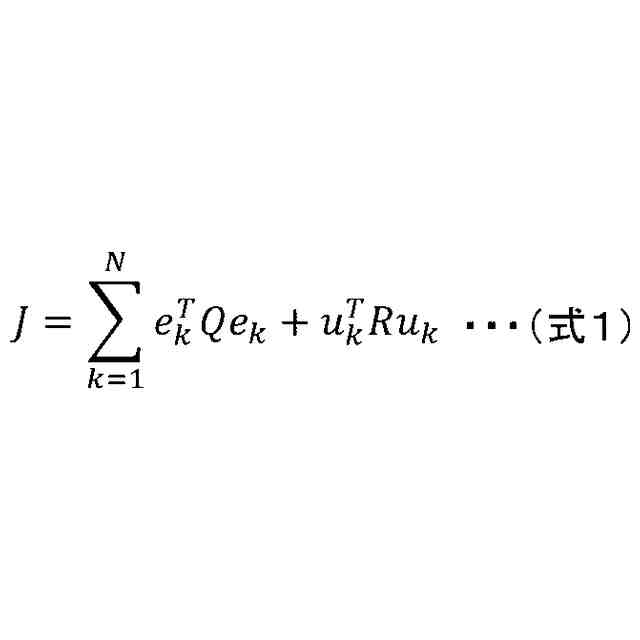
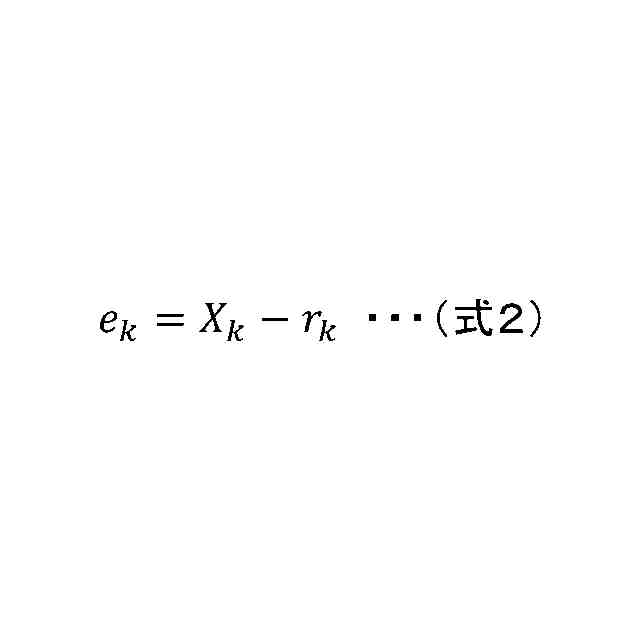
移動体の状態量とアクチュエータへの指令値を用いて表現される1つ以上の関数とそれらの関数に対応する重みパラメータで定義される評価関数を構築する評価関数設定部と、
予測ステップ数までの移動体の挙動を予測する機能を有し、各予測ステップにおいて、前回ステップより前記評価関数設定部で定めた評価関数の値が減少するように制御入力を算出する予測制御部とを有し、
前記パラメータ設定部は、前記評価関数設定部で利用する重みパラメータであり、かつ、前記パラメータ設定部は、前記自己位置演算部で算出した移動体の現在位置と、前記予測制御部で算出した移動体の予測位置とに基づいて、重みパラメータを前記評価関数設定部に提供することを特徴とする移動体制御システム。
【請求項8】
請求項7記載の移動体制御システムにおいて、
前記パラメータ設定部は、前記自己位置演算部で算出した移動体の現在位置から前方に緩衝区間を設け、緩衝区間での追従精度よりも緩衝区間の終端から前記予測制御部で算出した移動体の予測位置の終端までの追従精度を優先させる重みパラメータを緩衝区間に設定することを特徴とする移動体制御システム。
【請求項9】
移動体に移動先を決定し、移動先までの経路形状と制御目標を含む移動ルートを生成する手順と、
設定された移動ルートで使用する制御パラメータを設定する手順とを有し、
前記制御パラメータを設定する手順は、
前記移動体が過去に自律走行した経路形状と制御目標と制御パラメータの組合せを少なくとも記録した走行記録の経路形状と制御目標を分割した過去ブロックを生成する手順と、
同一の制御パラメータを対応させられる類似した過去ブロックにより形成される過去ブロック集合を生成する手順と、
前記移動ルートの経路形状と制御目標を分割した現在ブロックを生成する手順と、
現在ブロックの経路形状と制御目標と過去ブロック集合の経路形状と制御目標を比較し、現在ブロックと類似した過去ブロック集合に対応した制御パラメータを生成する手順と
からなることを特徴とする移動体制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体制御システムおよび移動体制御方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
工事現場や鉱山での土砂運搬、送迎や物流におけるドライバー不足を解消するために、自律走行車両の導入が進んでいる。このような自律移動体は与えられる作業内容により要求される走行内容が異なる。例えば、人や精密機械の運搬では車酔いや破損を防ぐために車両の揺れが小さい走行が求められ、土砂や鉱石の運搬では時間当たりの運搬量を増やすために短時間で往復可能な走行が求められる。要求される走行内容が異なる場合、自律移動体に与えられる制御目標(節点(ノード)と枝(ブランチ/エッジ)などで表現される軌道目標や目標となる速度分布など)が異なるため、作業が変わるごとに制御目標を設計する必要が生じ、運用現場に大きな負担(エンジニアリングコスト)を求めることになる。加えて、制御目標が異なる場合、その制御目標を達成するために制御器の調整が必要となる。制御目標が変わるごとに制御器を調整する場合、運用現場の負担がさらに増加する。一方で、このような調整を行わない場合は様々な作業に適用できる汎用的な設定が必要となるため、作業ごとに調整した場合に比べ、制御精度の低下や実施可能な作業に対する制限が生じる。
【0003】
このような課題に対する従来技術としては、例えば、特許文献1に記載のものが知られている。特許文献1には、車両の走行状態に応じて、車速の制御の基準となる目標走行パターンを出力する車両走行支援装置であって、地図上に予め設定された区間を走行する度に、先行車両の有無、及び、後続車両の有無を含む車両の走行状態に基づいて分類して、前記区間内における車速又は先行車両との車間距離の変化を示す走行パターンを記憶し、記憶された走行パターンのうち、現在の車両の走行状態と同一の車両の走行状態に分類された前記走行パターンに基づいて、前記目標走行パターンを生成して出力する車両走行支援装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2013-193671号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来技術においては、自律移動体が過去に実施した作業の中で記録された走行パターンから制御目標である目標走行パターンを生成するため、同じ現場、或いは、同じ車両(自律移動体)での繰り返し運用における負担削減には有効である。
【0006】
しかしながら、自律移動体の現場への新規導入時には、現場の状況や使用する車両、与えられる作業などの組合せに応じて個々に特有な状況になりやすいため、自律移動体が導入される現場と同一の状況の走行パターンを他の現場における過去の記録から取得することは困難である。すなわち、自律移動体の新規導入においては、制御目標などを新たに設定する必要があるため負担軽減が限定的となり、現場への導入に時間を要してしまうことが考えられる。
【0007】
本発明は上記に鑑みてなされたものであり、自律移動体の現場への新規導入の際の負担を軽減することができ、現場への導入を迅速に行うことができる移動体制御システムおよび移動体制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
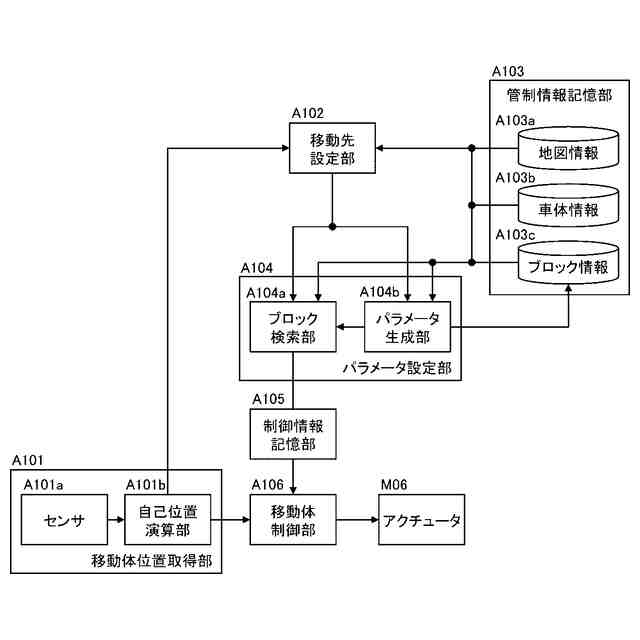
本願は上記課題を解決する手段を複数含んでいるが、その一例を挙げるならば、移動体に移動先を決定し、移動先までの経路形状と制御目標を含む移動ルートを生成する移動先設定部と、前記移動先設定部で設定された移動ルートで使用する制御パラメータを設定するパラメータ設定部と、前記移動体が過去に自律走行した経路形状と制御目標と制御パラメータの組合せを少なくとも記録した走行記録を記憶した情報記憶部と、を備えた移動体制御システムにおいて、前記パラメータ設定部は、前記走行記録の経路形状と制御目標を分割した過去ブロックを生成し、同一の制御パラメータを対応させられる類似した過去ブロックにより形成される過去ブロック集合を生成し、前記移動ルートの経路形状と制御目標を分割した現在ブロックを生成し、現在ブロックの経路形状と制御目標と過去ブロック集合の経路形状と制御目標を比較し、現在ブロックと類似した過去ブロック集合に対応した制御パラメータを生成するものとする。
【発明の効果】
【0009】
本発明によれば、自律移動体の現場への新規導入の際の負担を軽減することができ、現場への導入を迅速に行うことができる。
【図面の簡単な説明】
【0010】
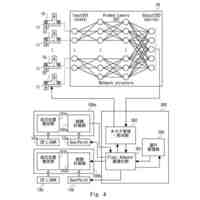
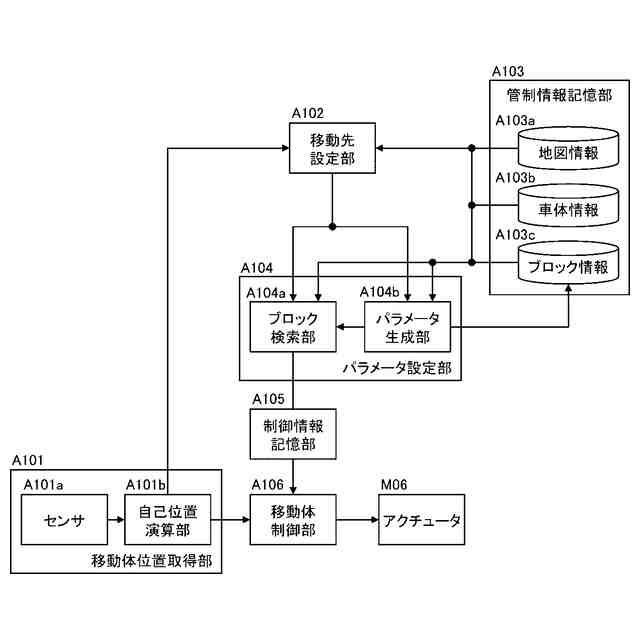
第1の実施の形態に係る移動体制御システムの全体構成を模式的に示す機能ブロック図である。
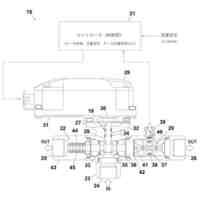
自律移動体が現場である鉱山において稼働している様子を示す図である。
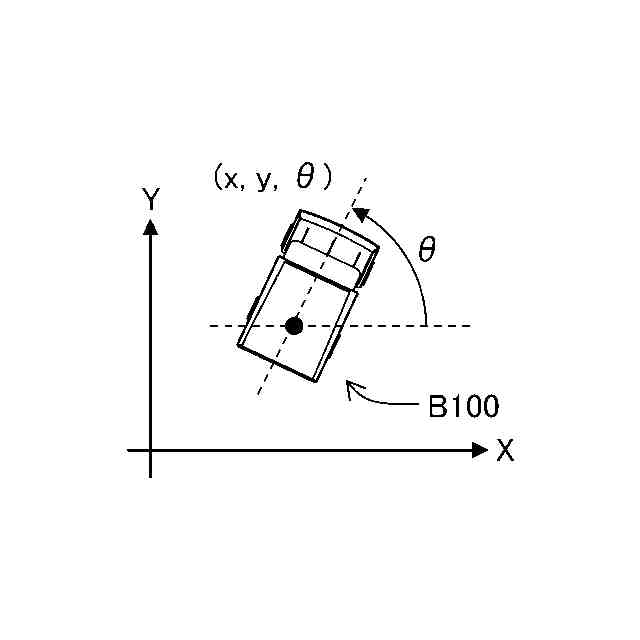
鉱山に設定される座標系を示す図である。
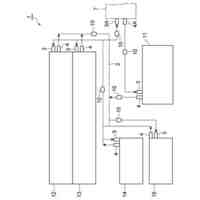
自律移動体の構成を模式的に示す機能ブロック図である。
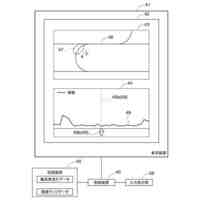
走行許可通路に設定される移動ルートの一例を示す図である。
設定された移動ルートにおける軌道目標の設定の様子を示す図である。
設定された移動ルートにおける速度目標の設定の様子を示す図である。
設定された移動ルート及び軌道目標の分割の様子を示す図である。
分割された各ブロックにおける速度目標の様子を示す図である。
分割された各ブロックのブロック情報の一例を示す図である。
ブロックの特徴と制御パラメータとの関係の一例を示す図である。
解候補の探索方法を模式的に示す図である。
移動体制御システムの処理内容を示すフローチャートである。
第2の実施の形態に係る移動体制御システムの全体構成を模式的に示す機能ブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
7日前
アズビル株式会社
制御装置
今日
村田機械株式会社
産業機械
21日前
株式会社ダイヘン
移動体
2か月前
神港テクノス株式会社
制御装置
2か月前
株式会社ダイヘン
移動体
2か月前
コフロック株式会社
流量制御装置
1日前
トヨタ自動車株式会社
自律移動体
21日前
トヨタ自動車株式会社
配送システム
1か月前
株式会社クボタ
作業車
21日前
株式会社丸和製作所
入力機器
今日
株式会社フジキン
流量制御装置
今日
株式会社フジキン
流体制御装置
1か月前
株式会社明電舎
車両
21日前
アズビル株式会社
パラメータ調整装置
1か月前
トヨタ自動車株式会社
ロボットシステム
29日前
トヨタ自動車株式会社
ロボットシステム
21日前
株式会社村田製作所
温度補償回路
7日前
株式会社ダイフク
搬送設備
8日前
株式会社ダイフク
搬送設備
2か月前
キヤノン株式会社
情報処理装置
29日前
ローム株式会社
電源回路
1か月前
株式会社ダイフク
物品搬送設備
2か月前
ローム株式会社
電源回路
1か月前
株式会社ダイフク
物品搬送設備
14日前
株式会社ダイフク
物品搬送設備
8日前
株式会社ダイフク
物品搬送設備
8日前
旭精機工業株式会社
監視データ処理装置
15日前
トヨタ自動車株式会社
群制御システム及び方法
2か月前
村田機械株式会社
搬送車システム
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
1日前
東フロコーポレーション株式会社
流量制御装置
1か月前
株式会社ダイフク
情報表示システム
1か月前
ブラザー工業株式会社
数値制御装置及び工作機械
21日前
株式会社日立製作所
移動体制御システム
1か月前
ローム株式会社
放電回路および電源システム
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ