TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025018367
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023121996
出願日
2023-07-26
発明の名称
無人航空機を用いた構造物の点検・補修方法
出願人
オリエンタル白石株式会社
代理人
個人
,
個人
主分類
B64U
10/60 20230101AFI20250130BHJP(航空機;飛行;宇宙工学)
要約
【課題】大きなバッテリーを搭載しなくても作業時間や使用できる機器の制限が少なく、且つ、給電用の電源ケーブルが安定飛行の阻害要因になり難い無人航空機を用いた構造物の点検・補修方法を提供する。
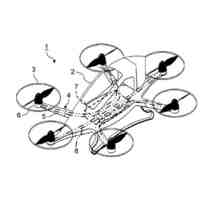
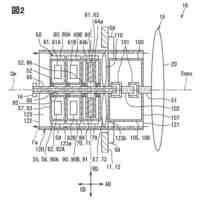
【解決手段】無人航空機1を用いた構造物の点検・補修方法において、構造物に吸着可能な真空吸着装置を有し、発電機に有線で接続された複数の給電部材をそれぞれ複数の無人航空機で運搬して有線で給電部材同士を接続して給電施設を延伸し、設置した給電部材から電力の供給を受けつつ無人航空機で前記構造物の点検・補修を行う。
【選択図】図1
特許請求の範囲
【請求項1】
無人航空機を用いた構造物の点検・補修方法であって、
構造物に吸着可能な真空吸着装置を有し、発電機に有線で接続された複数の給電部材をそれぞれ複数の無人航空機で運搬して有線で給電部材同士を接続して給電施設を延伸し、設置した給電部材から電力の供給を受けつつ無人航空機で前記構造物の点検・補修を行うこと
を特徴とする無人航空機を用いた構造物の点検・補修方法。
続きを表示(約 270 文字)
【請求項2】
前記給電部材は、無人航空機に脱着可能に構成されていること
を特徴とする請求項1に記載の無人航空機を用いた構造物の点検・補修方法。
【請求項3】
前記給電施設の先端部は、有線で複数の給電部材に分岐されていること
を特徴とする請求項1又は2に記載の無人航空機を用いた構造物の点検・補修方法。
【請求項4】
前記給電部材とともに、前記無人航空機と通信する通信ケーブルも延伸すること
を特徴とする請求項1又は2に記載の無人航空機を用いた構造物の点検・補修方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、無人航空機を用いた構造物の点検・補修方法に関し、詳しくは、給電中継手段と真空吸着装置を有する無人航空機を用いた構造物の点検・補修方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
構造物の維持管理においては、有人で構造物を点検して仮設足場等を設置しつつ補修を行っているのが現状である。このため、点検・補修に費用が嵩むだけでなく、点検・補修すべき構造物の膨大なストックがあるため、耐用年数が経過するまでに人員不足により構造物の点検・補修を行うことができないという問題が発生している。また、点検・補修時には、仮設足場の設置や橋梁点検車の使用が必要なことから、車線規制も必要になるという問題もある。
【0003】
このような問題を解決するべく、簡易的に維持管理を行うための一手法として、飛行ロボットによる点検補修も提案されている。例えば、特許文献1には、複数のドローン1を有線ケーブル2によって直列に連結してドローン群を形成し、有線ケーブル2は、各ドローン1への給電及び/又は各ドローン1との通信を行う機能を有し、ドローン群の一端側のドローン1に、ドローン群の移動を制御する制御装置3を接続した有線式ドローン群が開示されている(特許文献1の特許請求の範囲の請求項1、明細書の段落[0024]~[0026]、図面の図4,図5等参照)。
【0004】
また、特許文献2には、複数のプロペラ2を有し三次元移動可能なドローン1であって、ドローン1の機体上部にメカナムホイール9が配置され、プロペラ2の揚力によって構造物にメカナムホイール9が接触した状態で、メカナムホイール9の推進力によって水平移動可能とするドローン1が開示されている(特許文献2の特許請求の範囲の請求項1、明細書の段落[0025]~[0044]、図面の図1~図6等参照)。また、特許文献2には、ドローン1に対して有線給電装置により地上から有線給電しながらトンネル内壁面を点検することが開示されている(特許文献2の特許請求の範囲の請求項6、明細書の段落[0043]、図面の図6等参照)。
【0005】
また、特許文献3には、本体部と、ローターを備えたドローンであって、建造物の鉄部に磁気吸着して走行する磁石車輪を本体部の上部に装着した懸垂型ドローンが開示されている(特許文献3の特許請求の範囲の請求項1、明細書の段落[0011]~[0021]、図面の図1,図2等参照)。また、特許文献3には、「高架や橋梁下面の点検では、高さが数十メートルよりも低いので、有線操作が適している。」こと、及び「有線とした場合、操縦用ラインと電力ライン及び計測機器の制御、計測データ用のラインをまとめて一体としたケーブルを、懸垂型ドローンの本体部に繋げることができる。これによって、懸垂型ドローンバッテリーを積む必要がなく、懸垂型ドローンの重量を軽量化できる。」ことも記載されている(特許文献3の特許請求の範囲の請求項1、明細書の段落[0027]、図面の図9等参照)。
【0006】
このような特許文献1~3に記載の無人航空機(ドローン)は、有線により給電を行うのでバッテリーの容量を小さくしたり、無くしたりすることができるというメリットがある。しかし、給電用の電源ケーブル等は、それ自体重量が重く、ローターに接触すると落下するおそれもあり、無人航空機の飛行の安定を阻害するという問題がある。
【0007】
また、特許文献3に記載の無人航空機(ドローン)は、磁気吸着するものであるため、コンクリート構造物には吸着できないという問題もあった。
【0008】
一方、特許文献4には、多関節ロボットアーム40の先端に吸着部と吸引ファンとを備える真空吸着装置50を有するドローン飛行体1Dが開示されている(特許文献4の特許請求の範囲の請求項6、明細書の段落[0051]~[0056]、図面の図6等参照)。
【0009】
特許文献4に記載のドローン飛行体1Dは、真空吸着装置50を有するため、真空吸着装置50によって構造物に吸着し、ドローン飛行体1Dを安定静止したうえで固定すれば、被点検構造物の微細な傷などの拡大撮影や打音点検などの精緻な点検作業などを行うことが可能とされている。
【0010】
しかし、特許文献4に記載のドローン飛行体1Dは、加速度センサーの検出値から、真空吸着装置50の移動速度、基準位置からの移動量及び移動方向を算出して、この値に基づき外乱方向に対して逆位相で真空吸着装置50を動かし、真空吸着装置50の位置及び姿勢を外乱前に補正して安定飛行姿勢を維持するものであり、飛行や吸着時にロボットアームを点検や補修に使用できるものではないという問題がある。また、特許文献4に記載のドローン飛行体1Dは、有線で給電する構成ではないため、飛行体に搭載可能なバッテリーでは十分な電力がなく、作業時間や使える機器に制約がでるという問題が発生する。その上、バッテリー容量を大きくすると、無人航空機も大きくなり、狭い場所に進入できなくなるという問題も発生する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
22日前
個人
ドローンシステム
2か月前
株式会社三圓
浮上装置
6か月前
個人
空港用貨物搬送車
10か月前
個人
垂直離着陸機用エンジン改
1か月前
個人
ドローンの計測操作方法3
6か月前
個人
飛行艇
8か月前
個人
ドローンの計測操作方法2
6か月前
キヤノン電子株式会社
磁気トルカ
7か月前
個人
人工衛星推進材循環エンジン
11か月前
個人
空中移動システム
3か月前
個人
ドローンを自動離着陸する方法
2か月前
個人
ドローン消音装置
4か月前
トヨタ自動車株式会社
ドローン
9日前
個人
エアライナー全自動パラシュート
22日前
合同会社アドエア
パラシュート射出装置
22日前
株式会社セネック
ドローンポート
9か月前
株式会社中北製作所
羽ばたき装置
10か月前
合同会社アドエア
飛行体の落下補助装置
3か月前
株式会社セネック
ドローンポート
9か月前
株式会社SUBARU
電動航空機
10か月前
株式会社ACSL
システム
29日前
株式会社ACSL
システム
29日前
株式会社中北製作所
羽ばたき装置
11か月前
株式会社SUBARU
移動体
3か月前
株式会社SUBARU
回転翼航空機
10か月前
個人
垂直離着陸機用ガスタービンエンジン
2か月前
全日本空輸株式会社
ドーリシステム
5か月前
HDサービス合同会社
カメラ装着装置
5か月前
ミネベアミツミ株式会社
無人機
8日前
ミネベアミツミ株式会社
無人機
8日前
本田技研工業株式会社
移動体
7か月前
株式会社デンソー
推進装置
8か月前
本田技研工業株式会社
移動体
7か月前
株式会社SUBARU
構造体の製造方法
7か月前
株式会社小糸製作所
航空機用灯具
7か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ