TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025017488
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023120541
出願日
2023-07-25
発明の名称
画像処理装置
出願人
東京計器株式会社
代理人
個人
,
弁理士法人i.PARTNERS特許事務所
主分類
G06T
3/14 20240101AFI20250130BHJP(計算;計数)
要約
【課題】複数の車両が相対回転した場合であっても複数のカメラによる撮像画像をより適切に合成する画像処理装置を提供する。
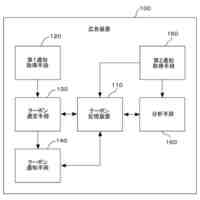
【解決手段】連結部を有する少なくとも2つの車両に設けられる第1のカメラと第2のカメラとを備える移動装置と通信可能に接続される画像処理装置であって、第1のカメラにより撮像された第1の撮像画像と、第2のカメラにより撮像された第2の撮像画像とを取得する画像取得部と、少なくとも1つの連結部の回転量を取得する測定情報取得部と、第1のカメラと第2のカメラとの相対位置及び相対姿勢と第1のカメラと第2のカメラとの間に位置する連結部の回転軸の位置及び向きを示すカメラ間外部パラメータと、第1のカメラと第2のカメラの間に位置する連結部について取得された回転量とに基づいて、第1の撮像画像と第2の撮像画像とを合成すること合成処理部と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
少なくとも2つの車両と、該少なくとも2つの車両を進行方向に連結し、回転軸周りに回転可能な少なくとも1つの連結部と、互いに異なる前記車両に設けられる第1のカメラと第2のカメラとを備える移動装置と通信可能に接続される画像処理装置であって、
前記第1のカメラにより撮像された第1の撮像画像と、前記第2のカメラにより撮像された第2の撮像画像とを取得する画像取得部と、
前記少なくとも1つの連結部の回転量を取得する測定情報取得部と、
前記第1のカメラと前記第2のカメラとの相対位置及び相対姿勢と前記第1のカメラと前記第2のカメラとの間に位置する連結部の回転軸の位置及び向きを示すカメラ間外部パラメータと、前記第1のカメラと前記第2のカメラの間に位置する連結部について取得された回転量とに基づいて、前記第1の撮像画像と前記第2の撮像画像とを合成すること合成処理部と
を備える画像処理装置。
続きを表示(約 1,300 文字)
【請求項2】
特徴点が2次元状に配列されたパターンが第1のカメラ及び第2のカメラのそれぞれにより撮像された調整用撮像画像と、該撮像用画像が撮像された時点における前記第1のカメラと前記第2のカメラの間に位置する連結部の回転量とに基づいて、第1外部パラメータを調整する調整処理部を更に備え、
前記合成処理部は、前記調整された前記第1外部パラメータに基づいて、前記第1の撮像画像と前記第2の撮像画像とを合成することを特徴とする請求項1に記載の画像処理装置。
【請求項3】
前記調整処理部は、前記第1外部パラメータに基づいて前記第2のカメラの座標系における前記第1のカメラによる撮像画像における特徴点の位置を算出し、該算出した特徴点が投影される第2のカメラによる撮像画像上の位置と、前記第2のカメラによる撮像画像上における前記算出された特徴点と同一の特徴点との距離が最小となるように前記第1外部パラメータを調整することを特徴とする請求項2に記載の画像処理装置。
【請求項4】
前記調整処理部は、前記移動装置を移動させながら前記第1のカメラが前記パターンを撮像した複数の撮像画像のそれぞれについて前記パターンを基準とする前記第1のカメラの位置を地面に投影した位置を前記移動装置の位置として算出し、算出した複数の前記移動装置の位置に基づく近似曲線を前記移動装置の軌跡として算出し、算出した規制に基づいて前記移動装置と前記第1のカメラとの相対位置及び相対姿勢を示す第2外部パラメータを算出し、
前記合成処理部は、前記第1外部パラメータと前記第2外部パラメータとに基づいて、前記第1の撮像画像と前記第2の撮像画像とを合成することを特徴とする請求項2または請求項3に記載の画像処理装置。
【請求項5】
前記調整処理部は、前記算出した軌跡に1軸を一致させるように前記移動装置の座標系を設定し、前記移動装置を移動させながら前記第1のカメラが前記パターンを撮像した複数の撮像画像のそれぞれについて、前記パターンを基準とする前記移動装置の相対位置及び相対姿勢を示す第3外部パラメータを算出し、算出した複数の第3外部パラメータに基づいて、前記第2外部パラメータを算出することを特徴とする請求項4に記載の画像処理装置。
【請求項6】
前記調整処理部は、前記移動装置を移動させながら前記第1のカメラが前記パターンを撮像した複数の撮像画像のそれぞれについて前記パターンを基準とする前記第1のカメラの装置位置及び相対姿勢を示す第4外部パラメータを複数算出し、算出した複数の第4外部パラメータのそれぞれと前記複数の第3外部パラメータのそれぞれとに基づいて、前記第2外部パラメータを算出することを特徴とする請求項5に記載の画像処理装置。
【請求項7】
前記調整処理部は、複数の第3外部パラメータのそれぞれと前記複数の第4外部パラメータのそれぞれとに基づいて算出した外部パラメータの平均値を前記第2外部パラメータとして算出することを特徴とする請求項6に記載の画像処理装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、撮像画像を合成する技術に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、複数の車両が互いに相対回転可能に連結された移動装置が知られている。このような移動装置は、作業者が容易に立ち入ることができない設備等の点検に用いられており、複数の車両のそれぞれにはカメラが備えられている。複数のカメラによる撮像画像は1つの合成画像に合成され、これによって、作業者は、広い視野範囲で点検対象の状態を容易に確認することができる。
【0003】
なお、関連する技術として、異なる時刻において、同じ道路空間を覆う第1カメラと第2カメラにより取得される画像を調和させる画像処理方法、が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2023-31307号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明が解決しようとする課題は、複数の車両が相対回転した場合であっても複数のカメラによる撮像画像をより適切に合成する技術を提供することである。
【課題を解決するための手段】
【0006】
一実施形態は、少なくとも2つの車両と、該少なくとも2つの車両を進行方向に連結し、回転軸周りに回転可能な少なくとも1つの連結部と、互いに異なる前記車両に設けられる第1のカメラと第2のカメラとを備える移動装置と通信可能に接続される画像処理装置であって、前記第1のカメラにより撮像された第1の撮像画像と、前記第2のカメラにより撮像された第2の撮像画像とを取得する画像取得部と、前記少なくとも1つの連結部の回転量を取得する測定情報取得部と、前記第1のカメラと前記第2のカメラとの相対位置及び相対姿勢と前記第1のカメラと前記第2のカメラとの間に位置する連結部の回転軸の位置及び向きを示すカメラ間外部パラメータと、前記第1のカメラと前記第2のカメラの間に位置する連結部について取得された回転量とに基づいて、前記第1の撮像画像と前記第2の撮像画像とを合成すること合成処理部とを備える。
【図面の簡単な説明】
【0007】
実施形態に係る移動装置の構成を示す概略平面図である。
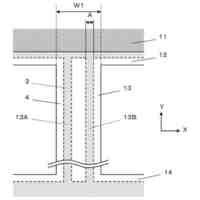
実施形態に係る移動装置の構成を示す概略側面図である。
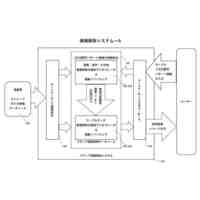
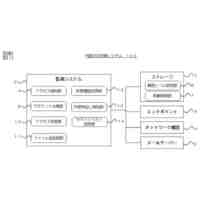
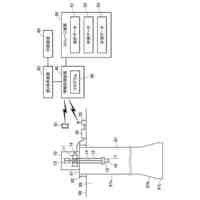
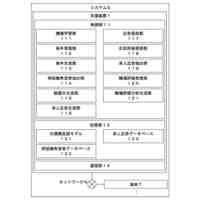
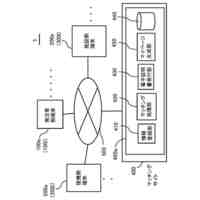
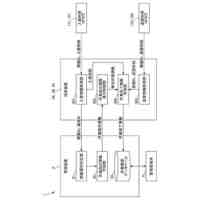
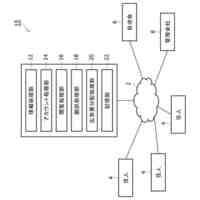
実施形態に係る制御システムの構成を示すブロック図である。
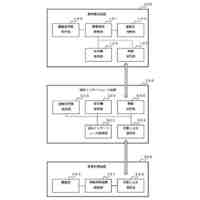
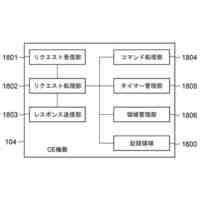
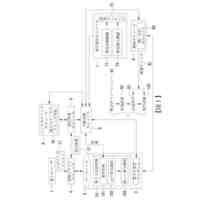
実施形態に係る画像処理装置のハードウェア構成を示すブロック図である。
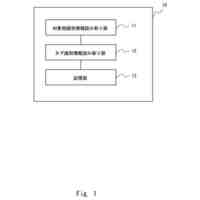
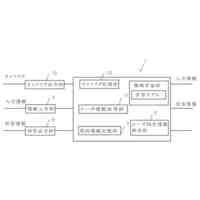
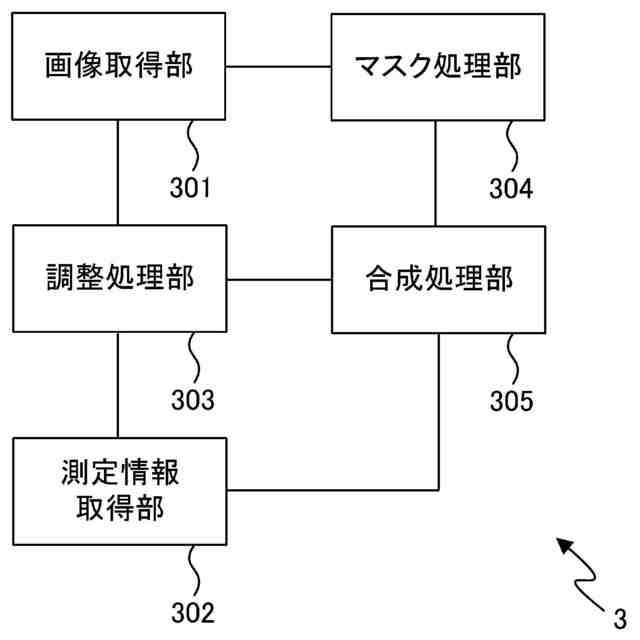
実施形態に係る画像処理装置の機能構成を示すブロック図である。
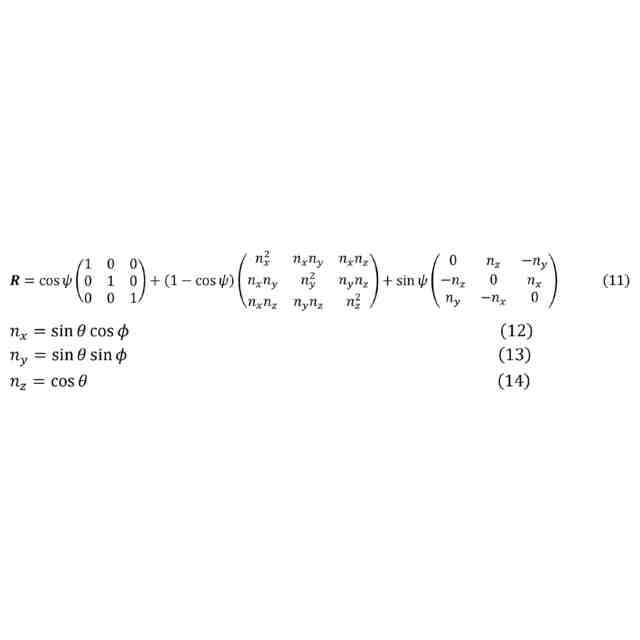
実施形態に係る世界座標系を示す図である。
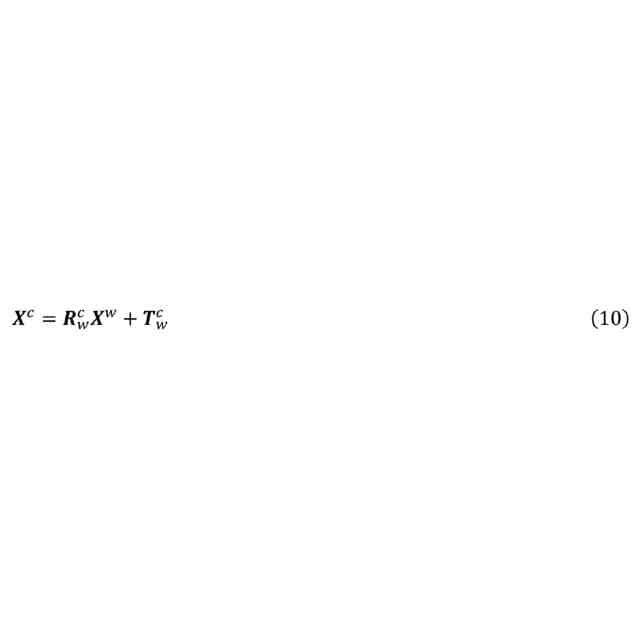
実施形態に係るカメラ座標系を示す図である。
実施形態に係る移動装置座標系を示す図である。
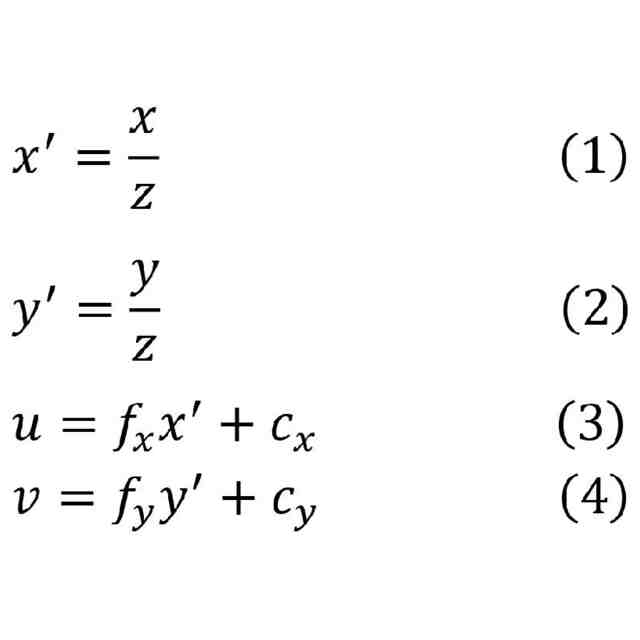
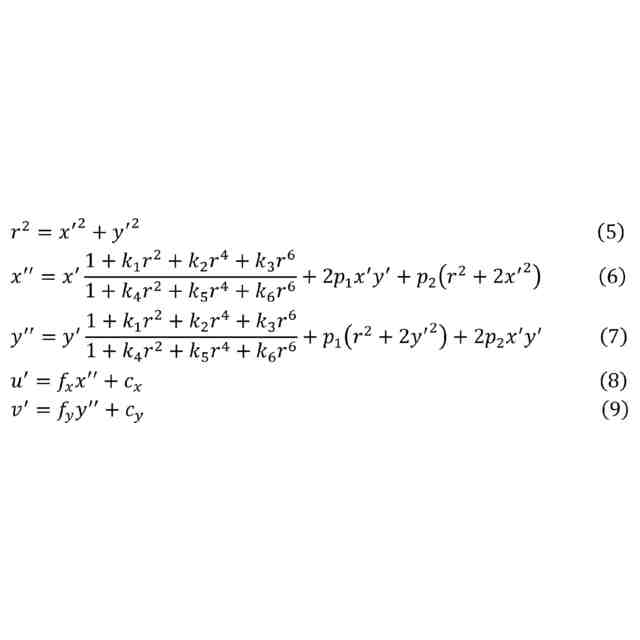
実施形態に係るピンホールカメラモデルを示す図である。
実施形態に係るマーカーパターンを示す図である。
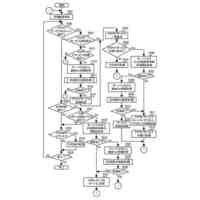
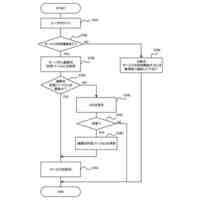
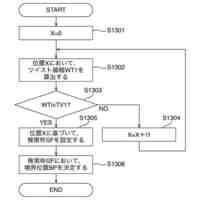
実施形態に係る第1調整処理の動作を示すフローチャートである。
実施形態に係る第2調整処理の動作を示すフローチャートである。
実施形態に係るモデル空間を示す図である。
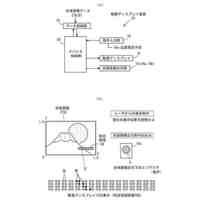
実施形態に係るマスク処理がなされない撮像画像を示す図である。
実施形態に係るマスク処理がなされた撮像画像を示す図である。
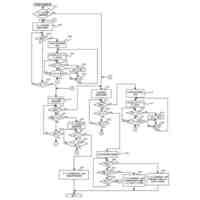
実施形態に係る合成処理の動作を示すフローチャートである。
実施形態に係る回転情報を用いた合成画像を示す図である。
実施形態に係る回転情報を用いない合成画像を示す図である。
【発明を実施するための形態】
【0008】
以下、図面を参照しながら、本発明の実施形態について説明する。
【0009】
(1 移動装置)
(1.1 移動装置の構成)
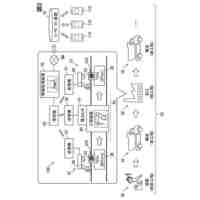
本実施形態に係る移動装置について説明する。図1、図2は、それぞれ、本実施形態に係る移動装置の構成を示す概略平面図、概略側面図である。
【0010】
図1、図2に示すように、移動装置1は、3つの車両10A~10Cとこれらを連結する2つの連結部12とを備える。3つの車両10A~10Cは、それぞれ、2つの車輪11を備える。車両10Aは移動装置1の直進方向における先頭に位置し、車両10Cは移動装置1の直進方向における後尾に位置し、車両10Bは車両10Aと車両10Cとの間に位置する。車両10Aと車両10Bとが連結部12により連結され、車両10Bと車両10Cとが連結部12により連結される。以降の説明において、3つの車両10A~10Cを区別しない場合、車両10と称する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
情報検索システム
12日前
個人
確率場データ同化演算手法
24日前
キヤノン株式会社
電子機器
11日前
個人
技術実行管理システム
26日前
シャープ株式会社
電子機器
25日前
キヤノン株式会社
電子機器
11日前
キヤノン株式会社
電子機器
11日前
個人
不動産情報提供システム
21日前
株式会社イノベイト
広告装置
14日前
キヤノン電子株式会社
通信システム
4日前
合同会社IPマネジメント
内部不正対策
19日前
個人
ネイルスキルテストシステム
25日前
トヨタ自動車株式会社
作業評価装置
4日前
トヨタ自動車株式会社
管理システム
6日前
西松建設株式会社
計測システム
10日前
TDK株式会社
等価回路
6日前
株式会社NURSY
再就職の支援装置
5日前
株式会社JVCケンウッド
情報処理装置
25日前
個人
外国為替証拠金取引定期自動売買システム
17日前
株式会社ヒニアラタ
障害者支援システム
19日前
株式会社サマデイ
メンタリングシステム
26日前
個人
公益寄付インタラクティブシステム
4日前
株式会社インテック
触覚ディスプレイ装置
5日前
株式会社セラク
営農支援システム及び方法
20日前
富士フイルム株式会社
タッチセンサ
4日前
大王製紙株式会社
作業管理システム
5日前
JUKI株式会社
電子名刺デバイス
25日前
キオクシア株式会社
電子機器
10日前
サクサ株式会社
警備サービス管理システム
14日前
ジャペル株式会社
登録管理システム
10日前
NGB株式会社
制御装置
24日前
株式会社デンソー
情報処理方法
12日前
合同会社COREHITS
情報共有システム
25日前
個人
チャットボットを用いたシステム
10日前
株式会社デンソー
情報処理方法
4日前
矢崎総業株式会社
情報処理装置
26日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ