TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025016590
公報種別
公開特許公報(A)
公開日
2025-02-04
出願番号
2024188976,2023094660
出願日
2024-10-28,2014-03-14
発明の名称
回転可能なシャフトを備えた作動機構体を有する外科用ステープラ
出願人
アプライド メディカル リソーシーズ コーポレイション
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
A61B
17/072 20060101AFI20250128BHJP(医学または獣医学;衛生学)
要約
【課題】複雑な機構体を用いないでクランプされた組織を確実にステープル留めする外科用ステープラを提供する。
【解決手段】外科用ステープラ10のためのハンドル組立体40が回転可能な作動シャフトを含む。作動シャフトは、作動シャフトがジョー組立体30を繰り返し可能な開きモードと閉じモードで作動させることができる第1の回転配向状態、作動シャフトがジョー組立体をステープル発火モードで作動させることができる第2の回転配向状態、及び作動シャフトがジョー組立体を後退モードで作動させることができる第3の回転配向状態を有することができる。ハンドル組立体は、回転可能な作動シャフトを回転配向状態のうちの一つに不連続に位置決めするよう構成された回転機構体を含む。回転機構体は、例えば作動シャフトを回転させるために摺動スイッチ又はセレクタを設けることによって、片手で操作できるよう構成されている。
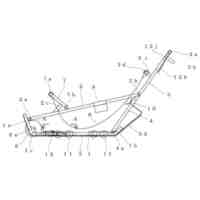
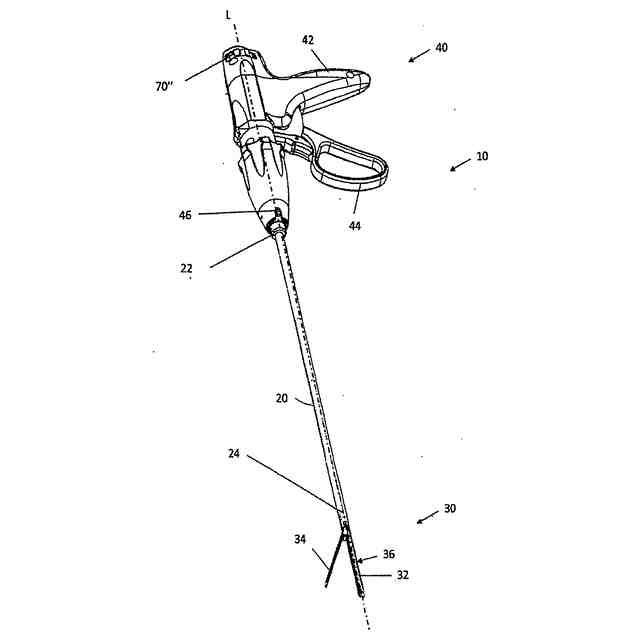
【選択図】図1
特許請求の範囲
【請求項1】
外科用ステープラであって、
近位端部及び遠位端部を有すると共に前記近位端部と遠位端部との間に長手方向軸線を定める細長いシャフトを有し、
前記細長いシャフトの前記遠位端部のところに配置されたジョー組立体を有し、前記ジョー組立体は、
第1のジョーと、
第2のジョーと、
複数個のステープルと、を含み、
前記ジョー組立体は、閉じ形態、開き形態、及び発火形態のうちの1つに選択的に位置決め可能であり、
前記細長いシャフトの前記近位端部のところに配置されたハンドル組立体を有し、前記ハンドル組立体は、
静止ハンドルと、
可動トリガと、
作動シャフトと、を含み、前記作動シャフトは、前記作動シャフトの前記長手方向軸線に対して前記ハンドル組立体内で長手方向に摺動可能であると共に前記長手方向軸線に対して前記ハンドル組立体内で回転可能であり、
前記作動シャフトは、前記ジョー組立体に作動可能に結合され、前記作動シャフトは、前記ジョー組立体の前記開き形態に対応した第1の位置から前記ジョー組立体の前記閉じ形態に対応した第2の位置に第1の方向に長手方向に摺動可能であると共に前記第2の位置から前記発火形態に対応した第3の位置に第1の方向に長手方向に摺動可能であり、
前記作動シャフトは、前記可動トリガに作動可能に結合され、前記作動シャフトは、前記トリガの運動により前記作動シャフトが前記第2の位置と前記第3の位置との間で動く第1の配向状態と前記トリガの運動により前記作動シャフトが前記第3の位置から前記第1の位置に動く第2の配向状態との間で回転可能である、外科用ステープラ。
続きを表示(約 1,700 文字)
【請求項2】
前記可動トリガは、前記静止ハンドルに回動可能に結合されている、請求項1記載の外科用ステープラ。
【請求項3】
前記ハンドル組立体は、
前記可動トリガに作動可能に結合された前進駆動体と、
前記可動トリガに作動可能に結合された後退駆動体と、
前記作動シャフトに沿って延びる前進面と、
前記前進面から角度的にオフセットした場所で前記作動シャフトに沿って延びる後退面とを更に含み、
前記作動シャフトが前記第1の配向状態にある場合、前記前進駆動体は、前記前進面に係合し、前記第2の配向状態では、前記後退駆動体は、前記後退面に係合する、請求項1又は2記載の外科用ステープラ。
【請求項4】
前記前進駆動体は、爪から成り、前記前進面は、前記作動シャフトに沿って形成された第1のラックから成る、請求項3記載の外科用ステープラ。
【請求項5】
前記後退駆動体は、爪から成り、前記後退面は、前記作動シャフトに沿って形成された第2のラックから成る、請求項3又は4記載の外科用ステープラ。
【請求項6】
前記ハンドル組立体は、前記可動トリガ、前記前進駆動体、及び前記後退駆動体に作動可能に結合されたアイドラを更に含み、前記トリガの運動により前記前進駆動体が第1の方向に動くと共に前記後退駆動体が前記第1の方向とは逆の第2の方向に動く、請求項3~5のうちいずれか一に記載の外科用ステープラ。
【請求項7】
前記ハンドル組立体は、前記作動シャフトに作動可能に結合された開放駆動体を更に含み、前記開放駆動体は、前記作動シャフトを前記第2の位置から前記第1の位置に付勢し、前記開放駆動体は、前記作動シャフトから選択的に離脱可能である、請求項1~6のうちいずれか一に記載の外科用ステープラ。
【請求項8】
近位端部及び遠位端部を有すると共に前記近位端部と前記遠位端部との間に長手方向軸線を定める細長いシャフトと、前記細長いシャフトの前記遠位端部のところに設けられたジョー組立体とを有する外科用ステープラのためのハンドル組立体であって、前記ハンドル組立体は、
ハウジングと、
前記ハウジング内に配置された作動機構体と、を含み、前記作動機構体は、
前進駆動体と、
後退駆動体と、
前記長手方向に沿って延びる作動シャフトと、を含み、前記作動シャフトは、前記長手方向軸線に対して前記ハウジングに回転可能に結合され、前記作動シャフトは、
前記作動シャフトに沿って長手方向に延びる前進面と、
前記作動シャフトに沿って長手方向に延びる後退面とを有し、前記後退面は、前記前進面から角度的にオフセットしており、
前記作動シャフトは、前記前進駆動体が前記前進面に係合する第1の配向状態と前記後退駆動体が前記後退面に係合する第2の配向状態との間で回転可能であり、
前記外科用ステープラの前記細長いシャフトに係合するようになったカップラを含む、ハンドル組立体。
【請求項9】
前記ハウジングに設けられた静止ハンドルと、
前記ハウジングに回動可能に結合されると共に前記静止ハンドルから間隔を置いた開き位置と前記静止ハンドルに隣接した閉じ位置との間で回動可能である可動ハンドルとを更に含み、
前記前進駆動体は、前記可動ハンドルに作動可能に結合され、前記前進駆動体は、前記開き位置から前記閉じ位置への前記可動ハンドルの運動に応答して前記長手方向軸線に対して遠位側に並進可能であり、
前記後退駆動体は、前記可動ハンドルに作動可能に結合され、前記後退駆動体は、前記開き位置から前記閉じ位置への前記可動ハンドルの運動に応答して前記長手方向軸線に対して近位側に並進可能である、請求項8記載のハンドル組立体。
【請求項10】
前記作動機構体は、前記可動ハンドル、前記前進駆動体、及び前記後退駆動体に作動可能に結合されたアイドラを更に含む、請求項9記載のハンドル組立体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願は、一般に、外科用閉塞器具、特に外科用ステープラに関する。
続きを表示(約 4,800 文字)
【0002】
〔関連出願の説明〕
本願は、2013年3月15日に出願された現在係属中の米国特許仮出願第61/794,700号(発明の名称:SURGICAL STAPLER HAVING ACTUATION MECHANISM WITH ROTATABLE SHAFT)の権益主張出願である。この先の出願を参照により引用し、その記載内容全体を本明細書の一部とする。
【背景技術】
【0003】
外科用ステープラは、組織に接近し又はクランプすると共にクランプされた組織を一緒にステープル留めするために用いられる。したがって、外科用ステープラは、組織が適正に位置決めされて捕捉されるようにし、そしてステープルを組織中に打ち込む機構体を有する。その結果、これにより、例えば、クランプされた組織の適正なステープル留めを可能にする複雑な機構体と関連して多数のトリガ及びハンドル(取っ手)が設けられた。
【発明の概要】
【発明が解決しようとする課題】
【0004】
これら複雑な機構体により、外科用ステープラは、製造上の負担が増すと共に器具の故障の潜在的な源及びユーザにとっての混乱を招く場合がある。かくして、複雑な機構体を用いないでクランプされた組織を確実にステープル留めすることが望ましい。
【課題を解決するための手段】
【0005】
或る特定の実施形態では、外科用ステープラが本明細書において提供される。外科用ステープラは、細長いシャフト、ジョー組立体、及びハンドル組立体を含む。細長いシャフトは、近位端部及び遠位端部を有する。細長いシャフトは、近位端部と遠位端部との間に長手方向軸線を定める。ジョー組立体は、細長いシャフトの遠位端部のところに配置されている。ジョー組立体は、第1のジョーと、第2のジョーと、複数個のステープルとを含む。ジョー組立体は、閉じ形態、開き形態、及び発火形態のうちの1つに選択的に位置決め可能である。ハンドル組立体は、細長いシャフトの近位端部のところに配置されている。ハンドル組立体は、静止ハンドルと、静止ハンドルに回動可能に結合された可動トリガと、作動シャフトとを含む。作動シャフトは、作動シャフトの長手方向軸線に対してハンドル組立体内で長手方向に摺動可能であると共に長手方向軸線に対してハンドル組立体内で回転可能である。作動シャフトは、ジョー組立体に作動可能に結合され、作動シャフトは、ジョー組立体の開き形態に対応した第1の位置からジョー組立体の閉じ形態に対応した第2の位置に第1の方向に長手方向に摺動可能であると共に第2の位置から発火形態に対応した第3の位置に第1の方向に長手方向に摺動可能である。作動シャフトは、可動トリガに作動可能に結合されている。作動シャフトは、トリガの運動により作動シャフトが第2の位置と第3の位置との間で動く第1の配向状態とトリガの運動により作動シャフトが第3の位置から第1の位置に動く第2の配向状態との間で回転可能である。
【0006】
或る特定の実施形態では、外科用ステープラのためのハンドル組立体が提供される。外科用ステープラは、近位端部及び遠位端部を有すると共に近位端部と遠位端部との間に長手方向軸線を定める細長いシャフトと、細長いシャフトの遠位端部のところに設けられたジョー組立体とを有する。ハンドル組立体は、ハウジング、ハウジング内に位置決めされた作動機構体、及びカップラを含む。作動機構体は、前進駆動体、後退駆動体、及び作動シャフトを含む。作動シャフトは、長手方向軸線に沿って延びている。作動シャフトは、長手方向軸線に対してハウジングに回転可能に結合されている。作動シャフトは、前進面及び後退面を有する。前進面は、作動シャフトに沿って長手方向に延びている。後退面は、作動シャフトに沿って長手方向に延びている。後退面は、前進面から角度的にオフセットしている。作動シャフトは、前進駆動体が前進面に係合する第1の配向状態と後退駆動体が後退面に係合する第2の配向状態との間で回転可能である。カップラは、外科用ステープラの細長いシャフトに係合するようになっている。ハンドル組立体の幾つかの実施形態では、ハンドル組立体は、ハウジングに設けられた静止ハンドルと、ハウジングに回動可能に結合されると共に静止ハンドルから間隔を置いた開き位置と静止ハンドルに隣接した閉じ位置との間で回動可能である可動ハンドルとを更に含む。可動ハンドルは、ハウジングに回動可能に結合されると共に静止ハンドルから間隔を置いた開き位置と静止ハンドルに隣接した閉じ位置との間で回動可能である。前進駆動体は、可動ハンドルに作動可能に結合され、前進駆動体は、開き位置から閉じ位置への可動ハンドルの運動に応答して長手方向軸線に対して遠位側に並進可能である。後退駆動体は、可動ハンドルに作動可能に結合され、後退駆動体は、開き位置から閉じ位置への可動ハンドルの運動に応答して長手方向軸線に対して近位側に並進可能である。
【0007】
或る特定の実施形態では、外科用ステープラのためのハンドル組立体が提供される。ハンドル組立体は、ハウジング、ハウジングに結合されたアクチュエータ、及び作動機構体を含む。作動機構体は、フォワード駆動体、リバース駆動体、作動シャフト、及びセレクタを含む。フォワード駆動体は、トリガに作動可能に結合されている。リバース駆動体は、トリガに作動可能に結合されている。作動シャフトは、長手方向軸線を有する。作動シャフトは、長手方向軸線に対してハウジングに回転可能に結合されている。作動シャフトは、フォワードインターフェース面及びフォワードインターフェース面から角度的にオフセットしたリバースインターフェース面を有する。作動シャフトは、フォワードインターフェース面がフォワード駆動体に係合して駆動シャフトをアクチュエータに応答して第1の方向に動かす第1の配向状態と、リバースインターフェース面がリバース駆動体に係合して作動シャフトをアクチュエータに応答して第1の方向とは逆の第2の方向に動かす第2の配向状態との間で回転可能である。セレクタは、作動シャフトを第1の配向状態と第2の配向状態との間で選択的に回転させるよう作動シャフトに作動可能に結合されている。幾つかの実施形態では、アクチュエータは、ハウジングに回動可能に結合されたトリガを有し、第1及び第2の方向における作動シャフトの運動は、トリガの回動運動に応答する。
【図面の簡単な説明】
【0008】
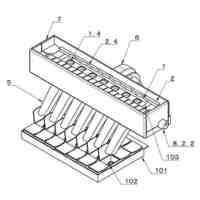
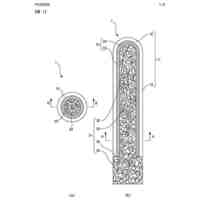
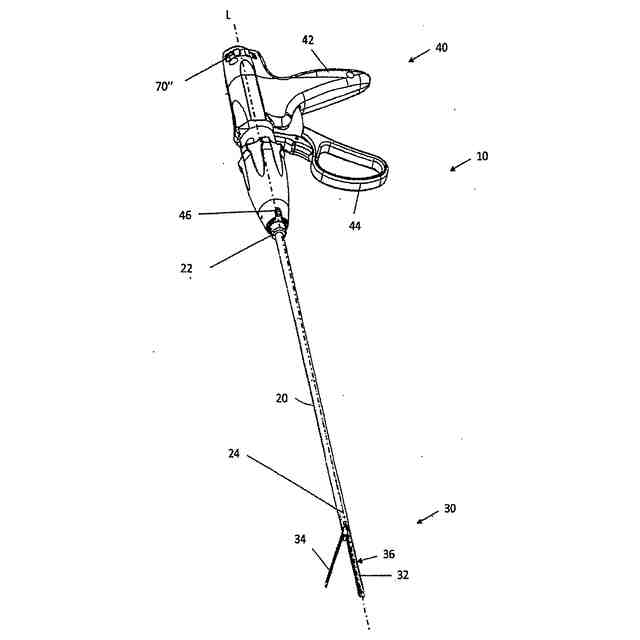
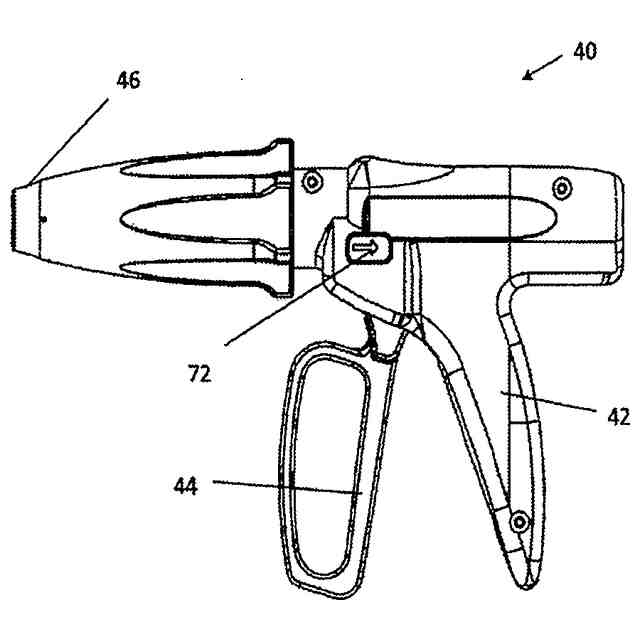
外科用ステープル留め器具の実施形態の斜視図であり、ジョーが開き形態にある状態を示す図である。
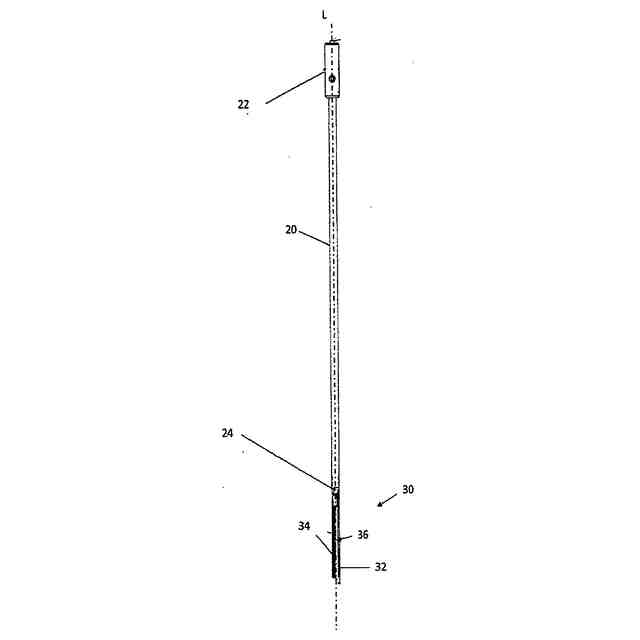
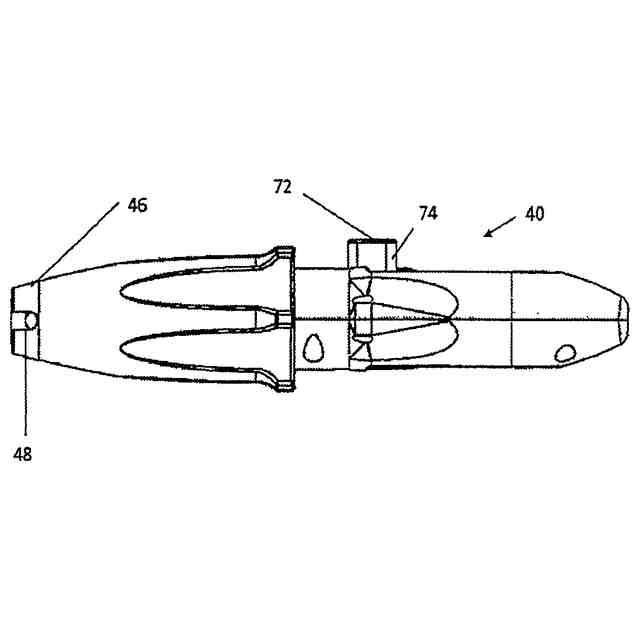
図1の外科用ステープル留め器具用のカートリッジの実施形態の斜視図であり、ジョーが閉じ形態にある状態を示す図である。
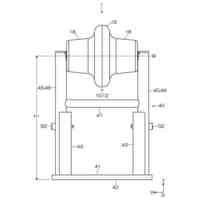
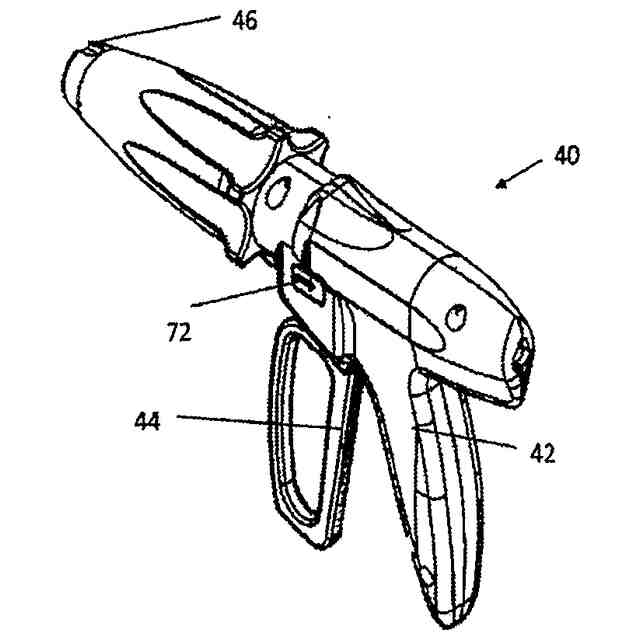
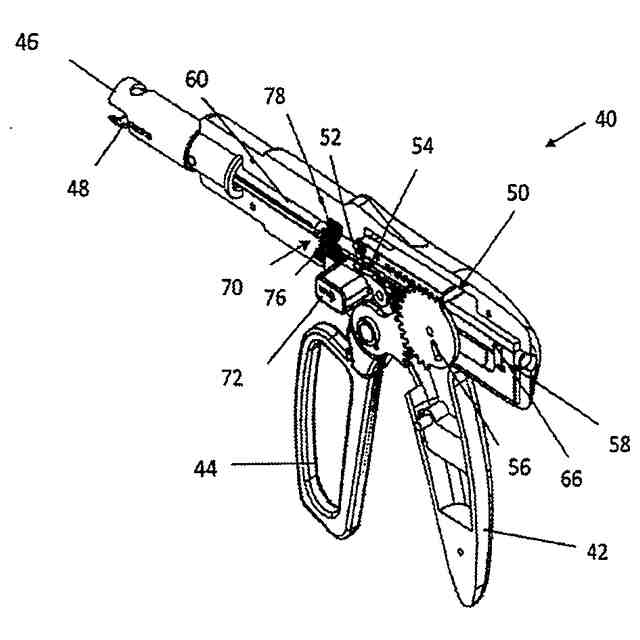
外科用ステープル留め器具のためのハンドル組立体の実施形態の斜視図である。
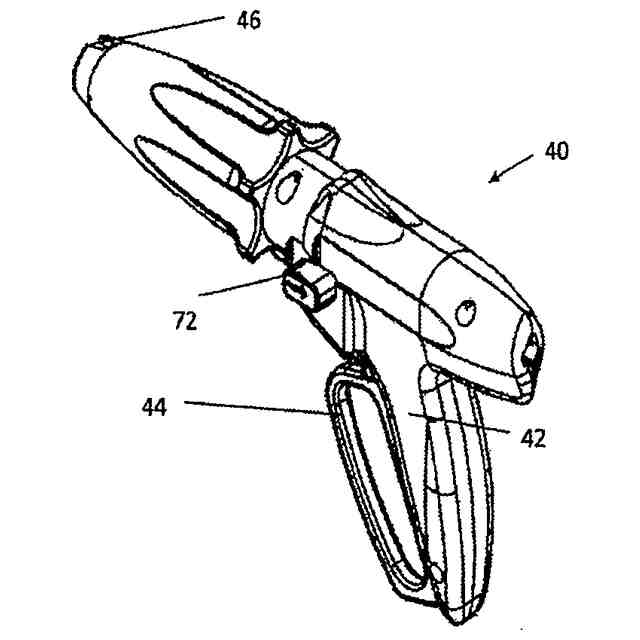
図3のハンドル組立体の斜視図であり、可動ハンドルが閉じ形態にある状態を示す図である。
図3のハンドル組立体の平面図であり、セレクタが第1の形態にある状態を示す図である。
図3のハンドル組立体の平面図であり、セレクタが第2の形態にある状態を示す図である。
図3のハンドル組立体の側面図である。
初期形態にある図3のハンドル組立体の断面側面図である。
図8Aのハンドル組立体の断面斜視図である。
閉鎖形態に作動された図3のハンドル組立体の断面側面図である。
図9Aのハンドル組立体の断面斜視図である。
フォワード駆動形態にある図3のハンドル組立体の断面側面図である。
図10Aのハンドル組立体の断面斜視図である。
フォワード駆動形態にある図3のハンドル組立体の断面側面図である。
図11Aのハンドル組立体の断面斜視図である。
完全に駆動されたフォワード形態にある図3のハンドル組立体の断面側面図である。
図12Aのハンドル組立体の断面斜視図である。
リバース駆動形態にある図3のハンドル組立体の断面側面図である。
図13Aのハンドル組立体の断面斜視図である。
完全に駆動されたリバース形態にある図3のハンドル組立体の断面側面図である。
図14Aのハンドル組立体の断面斜視図である。
外科用ステープル留め用器具ハンドル組立体の別の実施形態の側面図である。
図15のハンドル組立体の斜視図である。
図15のハンドル組立体の切除側面図である。
図15のハンドル組立体の作動機構体のための回転機構体の平面図である。
図18の回転機構体のハブカラー及び作動シャフトの平面図であり、ハブカラーが第1の位置にある状態を示す図である。
図18の回転機構体のハブカラー及び作動シャフトの平面図であり、ハブカラーが第2の位置にある状態を示す図である。
図18の回転機構体のハブカラー及び作動シャフトの平面図であり、ハブカラーが第3の位置にある状態を示す図である。
図18の回転機構体のハブカラー及び作動シャフトの平面図であり、ハブカラーが第4の位置にある状態を示す図である。
図18の回転機構体のハブカラー及び作動シャフトの平面図であり、ハブカラーが第5の位置にある状態を示す図である。
図18の回転機構体のハブカラー及び作動シャフトの平面図であり、ハブカラーが第6の位置にある状態を示す図である。
図18の回転機構体のハブカラー及び作動シャフトの平面図であり、ハブカラーが第7の位置にある状態を示す図である。
【発明を実施するための形態】
【0009】
図1及び図2を参照すると、外科用ステープル留め器具の実施形態が示されている。外科用ステープラ10の図示の実施形態は、細長いシャフト20、ジョー組立体30、及びハンドル(取っ手)組立体40を有する。図1は、ジョー組立体30が開き形態にある状態で外科用ステープラ10を示している。図2は、ジョー組立体30が閉じ形態にある状態で外科用ステープラ10の細長いシャフト20及びジョー組立体30を有する取り外し可能なカートリッジを示している。
【0010】
引き続き図1及び図2を参照すると、外科用ステープラ10の図示の実施形態は、腹腔鏡下外科的手技に用いられるよう寸法決めされると共に形作られるのが良い。例えば、細長いシャフト20及びジョー組立体30は、アクセスポート又はトロカールカニューレを通って術野中に導入されるよう寸法決めされると共に形作られるのが良い。幾つかの実施形態では、細長いシャフト20及びジョー組立体30は、比較的小さな作業チャネル直径、例えば8mm未満の直径を有するトロカールカニューレ中に挿入されるよう寸法決めされると共に形作られるのが良い。他の実施形態では、細長いシャフト20及びジョー組立体30は、大きな作業チャネル直径、例えば10mm、11mm、12mm、又は15mmの直径を有するトロカールカニューレ中に挿入されるよう寸法決めされると共に形作られるのが良い。他の実施形態では、本明細書において説明する床用ステープラの或る特定の観点を開放外科的処置に用いられる外科用ステープル留め器具に組み込んでも良いことが想定される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
健康器具
7日前
個人
鼾防止用具
3日前
個人
歯の掃除具
3か月前
個人
歯茎みが品
1か月前
個人
錠剤撒き器
5か月前
個人
導電香
24日前
個人
乗馬テラピー
4か月前
個人
マッサージ機
18日前
個人
脈波測定方法
10日前
個人
身体牽引装置
3か月前
個人
脈波測定方法
3日前
個人
塗り薬塗り具
2か月前
個人
収納容器
2か月前
個人
染毛方法
3か月前
個人
発熱器具
3か月前
個人
クリップ
1か月前
個人
健康器具
2か月前
個人
片足歩行支援具
1か月前
個人
磁器治療器
4か月前
個人
挟圧手工爪矯正具
5か月前
株式会社コロナ
脱臭機
5か月前
個人
鼻腔拡張具
6か月前
個人
口内洗浄具
10日前
個人
動体視力強化装置
4か月前
個人
眼科診療車
1か月前
株式会社コーセー
美爪料
1か月前
個人
口腔ケア用歯ブラシ
6か月前
個人
血管硬化度算出方法
4か月前
東レ株式会社
吸収制御剤
3か月前
東レ株式会社
下肢着用具
4か月前
個人
避難困難者救出台車
1か月前
株式会社 MTG
浴用剤
25日前
株式会社コーセー
化粧料
1か月前
個人
除菌システム
1か月前
株式会社ナカニシ
生検針
4か月前
株式会社ニデック
眼科装置
5か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ