TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025016533
公報種別
公開特許公報(A)
公開日
2025-02-04
出願番号
2024184292,2021575295
出願日
2024-10-18,2019-12-10
発明の名称
追跡システムと追跡システムによる追跡対象のマーカデバイス
出願人
コーニンクレッカ フィリップス エヌ ヴェ
,
Koninklijke Philips N.V.
代理人
弁理士法人M&Sパートナーズ
主分類
A61B
34/20 20160101AFI20250128BHJP(医学または獣医学;衛生学)
要約
【課題】医療デバイスへの取り付けられているマーカデバイスを追跡する追跡システムを提供する。
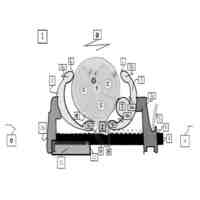
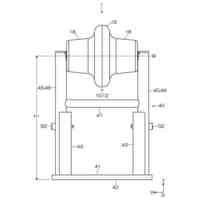
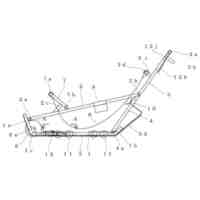
【解決手段】マーカデバイス501は、外部磁気励起場又は外部電磁励起場によって機械式振動を起こす磁性体507、508を有するセンシングユニットを有し、追跡システムは、磁性体の機械式振動を誘起させるのに所定の磁気励起場又は電磁励起場を生成する磁場発生装置と、磁性体の誘起された機械式振動を1つ又は複数の電気応答信号に変換するトランスデューサと、1つ又は複数の電気応答信号に基づいて、マーカデバイスの位置を決定する位置決定ユニットとを有する。
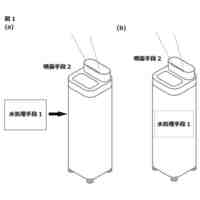
【選択図】図1
特許請求の範囲
【請求項1】
医療デバイスに取り付けられているマーカデバイスを追跡するための、外科手術用の追跡システムであって、
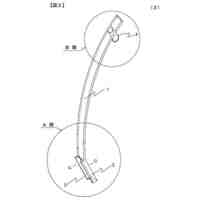
前記マーカデバイスは、
永久磁気モーメントをもたらす磁性体を有するセンシングユニットであって、外部磁気励起場又は外部電磁励起場を前記磁性体の機械式振動に変換する、センシングユニットを有し、
前記追跡システムが、
前記センシングユニットの前記磁性体の機械式振動を誘起させるのに所定の磁気励起場又は電磁励起場を生成する磁場発生装置と、
前記磁性体の誘起された機械式振動によって生成された磁場又は電磁場を1つ又は複数の電気応答信号に変換するトランスデューサと、
前記1つ又は複数の電気応答信号に基づき、前記マーカデバイスの位置を決定する位置決定ユニットとを有する、追跡システム。
続きを表示(約 1,700 文字)
【請求項2】
前記位置決定ユニットが、前記1つ又は複数の電気応答信号に基づき、前記追跡システムによって与えられた座標系に対する前記マーカデバイスにとっての少なくとも5自由度を決定し、前記少なくとも5自由度は、前記追跡システムに対する前記マーカデバイスの位置及び少なくとも2つの向き角を含む、請求項1に記載の追跡デバイス。
【請求項3】
前記追跡システムが、前記複数のマーカデバイスの位置を決定し、前記複数のマーカデバイスのそれぞれは、それぞれのセンシングユニットを有し、
前記それぞれのセンシングユニットの前記磁性体が、共振周波数が違えば、前記それぞれのマーカデバイスに特有のぞれぞれの1つ又は複数の電気応答信号において変換される異なる磁場又は電磁場を生成するように振動可能であり、
前記位置決定ユニットが、前記それぞれの1つ又は複数の電気応答信号に基づき、前記複数のマーカデバイスのうちの1つ又は複数の位置を決定する、請求項1又は2に記載の追跡システム。
【請求項4】
温度に対する前記1つ又は複数の電気応答信号の依存を補償する、請求項1から3のいずれか一項に記載の追跡システム。
【請求項5】
前記位置決定ユニットが、
静的背景磁場、及び
動的背景磁場
のうちの1つ又は複数を補償する、補償アルゴリズムを適用する、請求項1から4のいずれか一項に記載の追跡システム。
【請求項6】
前記位置決定ユニットが、様々な振動振幅の前記機械式振動からもたらされる非線形性を補償するために補償アルゴリズムを適用する、請求項1から5のいずれか一項に記載の追跡システム。
【請求項7】
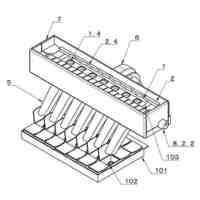
前記磁場発生装置は、所定の空間配列で配列された複数の発生ユニットを有する磁場発生アレイを有し、
前記1つ又は複数の電気応答信号が、前記複数の発生ユニットのそれぞれによって誘起された前記センシングユニットの前記磁性体の特有の機械式振動を示し、
前記位置決定ユニットが、前記特有の機械式振動を示す前記1つ又は複数の電気応答信号に少なくとも部分的に基づき、前記マーカデバイスの位置を決定する、請求項1から6のいずれか一項に記載の追跡システム。
【請求項8】
前記位置決定ユニットが、前記1つ又は複数の電気応答信号から、前記複数の発生ユニットのユニットごとに、前記磁性体の前記特有の機械式振動の振幅を決定する、請求項7に記載の追跡システム。
【請求項9】
前記追跡システムが制御ユニットをさらに有し、
前記磁場発生装置は、所定の空間配列で配列された複数の発生ユニットを有する磁場発生アレイを有し、
前記複数の発生ユニットのそれぞれのユニットが、前記制御ユニットによって、前記複数の発生ユニットのそれ以外のユニットとは無関係に制御され、前記制御ユニットは、前記磁気励起場又は電磁励起場の少なくとも1つの空間励磁場成分が前記制御によって修正可能であるように、前記発生ユニットのうちの少なくともいくつかを制御し、
前記位置決定ユニットは、前記少なくとも1つの空間励起場成分の前記修正を示す前記1つ又は複数の電気応答信号に少なくとも部分的に基づいて、前記マーカデバイス位置を決定する、請求項1から8のいずれか一項に記載の追跡システム。
【請求項10】
前記磁場発生装置が、空間及び/又は時間で変動のある一連の様々なさらなる磁気エンコーディング場又は電磁エンコーディング場を順次生成し、
前記位置決定ユニットが、前記一連の様々なさらなる磁気エンコーディング場又は電磁エンコーディング場のそれぞれに応じて前記磁性体の誘起された機械式振動によって生成された磁場又は電磁場に基づいて、前記トランスデューサによって変換された前記1つ又は複数の電気応答信号に少なくとも部分的に基づいて、前記マーカデバイスの位置を決定する、請求項1から9のいずれか一項に記載の追跡システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、医療デバイスに取りけられたマーカデバイスを対象とする追跡システム、それぞれのマーカデバイス、対応する医療デバイス、マーカデバイスを追跡する際の追跡方法及び追跡コンピュータプログラムに関するものである。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
侵襲の、具体的には、低侵襲の医療処置は、患者に対し血管内状態を正しく見極め且つ/又は処置するのによく使用される手段である。
【0003】
特に低侵襲医療処置において、このような処置に使用される医療デバイスを電磁力で追跡することが知られている。しかし、このような電磁追跡には、医療デバイスの位置だけではなく向きも決定するために、医療デバイスは、いくつかの電磁マーカデバイス、各マーカデバイスが、例えば、3自由度(DoF:Degree of freedom)~5自由度(DoF)に適合されるいくつかの電磁マーカデバイスを装備する必要があるという欠点がある。
【0004】
また、一般的に知られている電磁マーカデバイスは、1mmよりも相当に大きい。例えば、B.Maxwellらによる論文「Validation of the Calypso Surface Beacon Trasponder」、Jornal of Applied Clinical Medical Phisics、17巻(2016年)、223~234頁に開示されている追跡システムによって使用される電磁マーカデバイスのサイズは、8mmである。
【0005】
さらなる問題として、比較的遠くからでは、例えば30cmよりも遠くからでは電磁マーカデバイスを読み出すことができないことが多い。例えば、B.Maxwellらによる上に述べた論文で開示されたシステムは、16cm程度離れてマーカデバイスを読み出すことを可能にする。
【発明の概要】
【発明が解決しようとする課題】
【0006】
したがって、本発明の目的は、改良型追跡システム、改良型マーカデバイス、それぞれの医療デバイス、またマーカデバイスを追跡する際の追跡方法及びコンピュータプログラムを提供することにある。より具体的には、本発明の目的は、小型であり、人間、具体的には、低侵襲処置が行われる患者の外科手術時に使用される医療デバイスの位置を正確に示すことができる、マーカデバイスを提供することにある。本発明のさらなる目的は、このようなマーカデバイスを正確に追跡することができる追跡デバイスを提供することにある。
【課題を解決するための手段】
【0007】
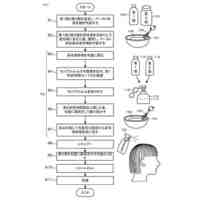
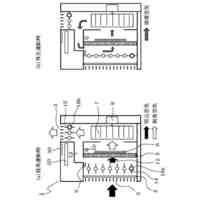
本発明の第1の態様により、医療デバイスに取り付けられたマーカデバイスを追跡する、外科手術用の追跡システムを提供する。マーカデバイスは、永久磁気モーメントをもたらす磁性体を有するセンシングユニットを有し、この場合、センシングユニットは、外部磁気励起場又は外部電磁励起場を磁性体の機械式振動に変換するように構成されている。追跡システムは、センシングユニットの磁性体の機械式振動を誘起させるのに所定の磁気励起場又は電磁励起場を起こす磁場発生装置と、磁性体の誘起された機械式振動によって生成された磁場又は電磁場を1つ又は複数の電気応答信号に変換するトランスデューサと、1つ又は複数の電気応答信号に基づいて、マーカデバイスの位置を決定する位置決定ユニットとを有する。
【0008】
したがって、医療デバイスに取り付けられたそれぞれのマーカデバイスを使用して、医療デバイスの位置及び/又は向きを追跡するのに使用され得る追跡システムを提供する。かなり小型のマーカデバイスを使用して医療デバイスに対する正確な位置決定及び/又は向き決定を可能にするような、この追跡システムは特に、外科手術時に、より一層具体的には低侵襲外科手術時に医療デバイスの位置及び/又は向きを追跡するのに採用される。
【0009】
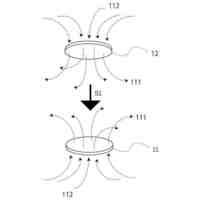
このため、追跡システムは、永久磁気モーメントを有する磁性体によるセンシングユニットで構成されたマーカデバイスを使用する。それにより、マーカデバイスのセンシングユニットが所定の外部磁気励磁場又は外部電磁励起場を受けると、磁性体が、この励起場を受けて振動し始める。磁性体の機械式振動は、磁場又は電磁(応答)場を起こし、この磁場又は電磁(応答)場が次に1つ又は複数の電気応答信号にそれぞれのトランスデューサによって変換される。次に、これらの応答信号を使用して、マーカデバイスの位置を引き出す。より具体的には、磁性体の機械式振動は、典型的には、位置応答信号の観点から表すことができ、マーカデバイスの位置、それによりマーカデバイスが取り付けられている医療デバイスの位置を決定するのに位置決定デバイスによって使用され得る、位置依存磁場変動をもたらす可能性がある。
【0010】
このコンテキストでは、医療デバイスという用語は、具体的に、医療処置に使用されるデバイスを指すものとしてもよい。実施形態によっては、医療デバイスとは、具体的に、外科手術時、具体的には低侵襲外科手術時に使用されるデバイスに相当するものとしてもよい。実施形態によっては、医療デバイスとは、人間、具体的には患者に対して行われる介入処置に使用される介入手段のことであってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
穿刺補助具
7か月前
個人
男性用下着
7か月前
個人
錠剤撒き器
5か月前
個人
歯茎みが品
17日前
個人
歯の掃除具
3か月前
個人
塗り薬塗り具
2か月前
個人
マッサージ機
4日前
個人
乗馬テラピー
3か月前
個人
身体牽引装置
3か月前
個人
導電香
10日前
個人
染毛方法
2か月前
個人
片足歩行支援具
25日前
個人
健康器具
2か月前
個人
発熱器具
3か月前
個人
クリップ
24日前
個人
収納容器
1か月前
個人
動体視力強化装置
3か月前
個人
排便漏れ予防装具
7か月前
個人
眼科診療車
1か月前
株式会社コロナ
脱臭機
5か月前
個人
鼻腔拡張具
5か月前
個人
磁器治療器
3か月前
個人
挟圧手工爪矯正具
5か月前
株式会社コーセー
美爪料
25日前
個人
除菌システム
25日前
株式会社コーセー
化粧料
25日前
個人
血管硬化度算出方法
4か月前
個人
マウスピース
7か月前
株式会社 MTG
浴用剤
11日前
個人
避難困難者救出台車
1か月前
東レ株式会社
下肢着用具
3か月前
個人
口腔ケア用歯ブラシ
5か月前
東レ株式会社
吸収制御剤
2か月前
株式会社ナカニシ
生検針
3か月前
個人
Dr.なかまつよい耳
2か月前
株式会社MIC
陰茎補助具
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ