TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025016531
公報種別
公開特許公報(A)
公開日
2025-02-04
出願番号
2024182521,2021512216
出願日
2024-10-18,2019-09-05
発明の名称
電気手術発生器制御システム
出願人
アプライド メディカル リソーシーズ コーポレイション
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
A61B
18/12 20060101AFI20250128BHJP(医学または獣医学;衛生学)
要約
【課題】全ての動的条件下で組織又は血管を密封、溶解、及び/又は切断するための最適RF出力を有する発生器を提供することによって手術結果を高めるためのシステム及び方法を提供する。
【解決手段】デジタル閉ループ制御システムは、RFエネルギを発生するためのRF増幅器と、接続可能な電気手術器具に供給されるRFエネルギの電気特性、例えば、電圧、電流、及び電力を継続的にモニタするためのフィードバックシステムと、フィードバックシステムからの測定データを処理し、かつあらゆる変化する条件下で望ましい調整ターゲットを満足するようにRF増幅器の出力を調節するためのマイクロコントローラとを含むことができる。
【選択図】図6
特許請求の範囲
【請求項1】
電気手術RFエネルギを手術部位に供給する電気手術発生器と共に使用されるデジタル閉ループ制御システムであって、
前記手術部位に前記供給されたRFエネルギの電気的性質を同時手術条件として継続的にモニタし、かつそれに関連するデジタルRF信号を発生させるためのフィードバックシステムと、
前記フィードバックシステムからの前記発生されたRF信号に応答して、前記供給されたRFエネルギを複数の調整モードにわたって発生させて外科手順のための最適RF出力をあらゆる手術条件、作動条件、又は手順条件下で提供するRF増幅器を調整かつ制御するように可変利得係数を用いて構成されたマイクロコントローラと、
を含むことを特徴とするデジタル閉ループ制御システム。
続きを表示(約 1,200 文字)
【請求項2】
前記フィードバックシステムは、前記RF出力の電気的性質を少なくとも1つのチャネルを通じて測定して該測定されたデータを前記マイクロコントローラにデジタル送信するように構成されることを特徴とする請求項1に記載のデジタル閉ループ制御システム。
【請求項3】
前記マイクロコントローラは、前記測定データを受信し、それに関連する電力計算を実行して電圧、電流、及び電力の測定された大きさを取得し、かつ前記複数の調整モードの各々に対する個々の誤差値を計算するように構成されることを特徴とする請求項2に記載のデジタル閉ループ制御システム。
【請求項4】
前記マイクロコントローラは、前記計算された誤差値に基づいて1つの調整モードを選択するように更に構成され、
前記調整モードは、最もポジティブな誤差値に基づいて選択される、
ことを特徴とする請求項3に記載のデジタル閉ループ制御システム。
【請求項5】
前記個々の誤差値は、望ましい電圧、電流、及び電力設定値を該電圧、電流、及び電力の前記測定された大きさから減算することによって計算されることを特徴とする請求項3に記載のデジタル閉ループ制御システム。
【請求項6】
前記マイクロコントローラは、前記複数の調整モードの各々に対する可変利得係数を演算して該計算された誤差値に基づいて1つの可変利得係数を選択するように更に構成され、
前記可変利得は、最もポジティブな誤差値に基づいて選択される、
ことを特徴とする請求項3に記載のデジタル閉ループ制御システム。
【請求項7】
前記複数の調整モードは、電圧、電流、及び電力調整モードのうちの1つを含むことを特徴とする請求項1に記載のデジタル閉ループ制御システム。
【請求項8】
前記マイクロプロセッサは、1次完全プログラマブルゲートアレイ(FPGA)及び1次プロセッサを含み、
前記1次プロセッサは、前記複数のRF調整モードの各々に対する望ましいRF出力値又は設定値を確立するように構成される、
ことを特徴とする請求項1に記載のデジタル閉ループ制御システム。
【請求項9】
前記望ましいRF値又は設定値は、デバイススクリプトによって提供されることを特徴とする請求項8に記載のデジタル閉ループ制御システム。
【請求項10】
前記複数の調整モードに対する前記可変利得係数は、望ましいRF値又は設定値、測定データの計算された大きさ、計算された組織インピーダンス負荷、及び累積誤差値、又はそのいずれかの組合せを使用して特殊アルゴリズムによって演算されることを特徴とする請求項1に記載のデジタル閉ループ制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
〔関連出願への相互参照〕
この出願は、これにより全ての目的に対してその全体が引用によって明示的に組み込まれる2018年9月5日出願の同時係属米国仮特許出願第62/727,195号の利益を主張するものである。
続きを表示(約 2,600 文字)
【0002】
本発明の開示は、一般的に電気手術発生器システム及び方法に関連し、より詳細には、組織又は血管を密封、溶解、及び/又は切断するための最適無線周波数(RF)エネルギを提供するために発生器の出力を動的に調整するように構成された電気手術制御システムに関する。
【背景技術】
【0003】
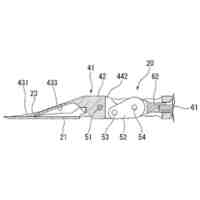
ある一定の外科的タスクを実行するために無線周波数(RF)エネルギを使用する電気手術ハンドデバイス又は器具が利用可能になっている。電気手術器具は、電気エネルギが電気手術発生器から供給されるように構成された1又は2以上の電極を含むことができる。電気エネルギは、それが印加される組織を溶解、密封、又は切断するのに使用することができる。そのような電気手術又は手術器具の例は、捕捉器具、はさみ、ピンセット、ブレード、又はニードルを含むことができる。
【0004】
電気手術器具は、典型的に2つの分類、すなわち、単極及び双極に該当する。単極器具では、電気エネルギは、高電流密度で器具上の1又は2以上の電極に供給され、一方で個別の戻り電極が、患者に電気的に結合され、かつ多くの場合に電流密度を最小にするように設計される。単極電気手術器具は、ある一定の手順では有用である可能性があるが、戻り電極の機能に少なくとも部分的に帰属することが多い電気火傷のようなある一定のタイプの患者損傷のリスクを含む可能性がある。双極電気手術器具では、1又は2以上の電極は、第1の極性の電気エネルギのソースに電気的に結合され、1又は2以上の他の電極は、第1の極性とは反対の第2の極性の電気エネルギのソースに電気的に結合される。別々の戻り電極なしで作動する双極電気手術器具は、低減したリスクで集中組織区域に電気信号を送出することができる。
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、双極電気手術器具の比較的集中した手術効果によってさえも、手術結果は、外科医技術に非常に依存することが多い。この依存性を低減するために強化された発生器が作られている。
【課題を解決するための手段】
【0006】
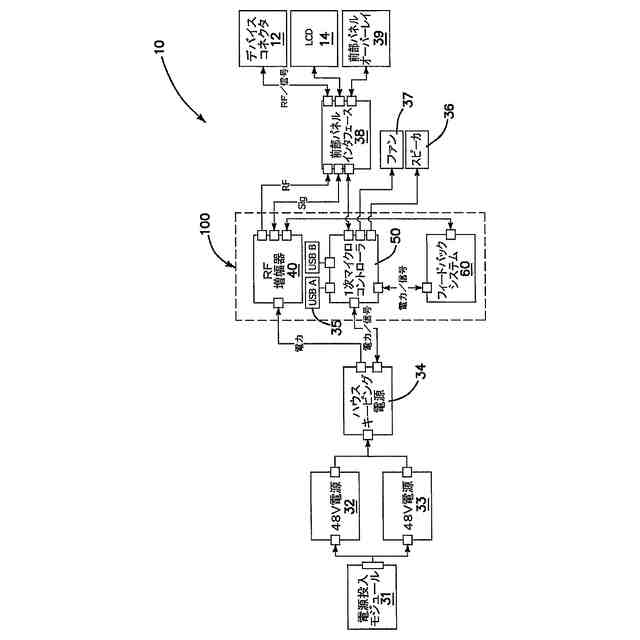
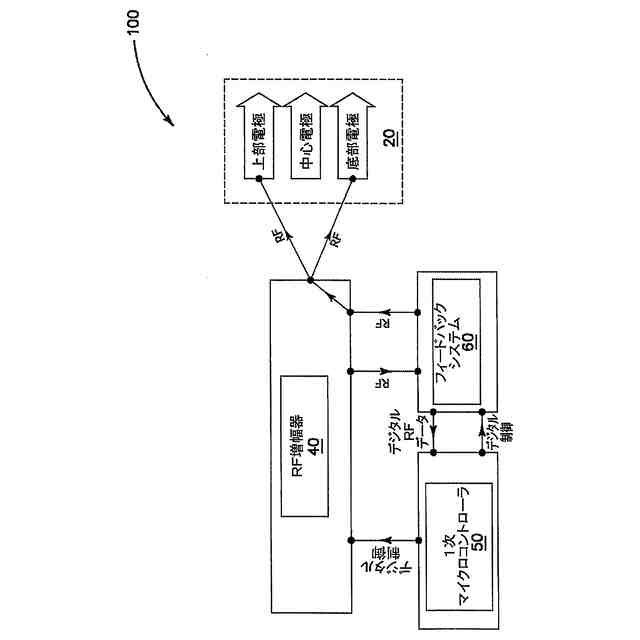
様々な実施形態により、組織を密封、溶解、及び/又は切断するための電気手術システムを提供する。電気手術システムは、電気手術発生器と電気手術器具又はデバイスとを含むことができる。電気手術発生器は、本発明の実施形態により、電気手術又は無線周波数(RF)エネルギの送出を調整し、RFエネルギを調節し、かつ様々な実施形態では接続可能な電気手術器具に供給されるRFエネルギの電気的性質、例えば、位相、電流、電圧、及び電力を測定かつモニタするデジタル閉ループ制御システムを含むことができる。様々な実施形態では、デジタル制御システムは、RF出力の電圧、電流、及び電力の測定及び調整における安定性を保証しながら精度を高める。これは、例えば、可変負荷、手順条件、又は作動条件のような動的条件下で組織/血管を密封、溶解、及び/又は切断するための最適RF出力を提供する。
【0007】
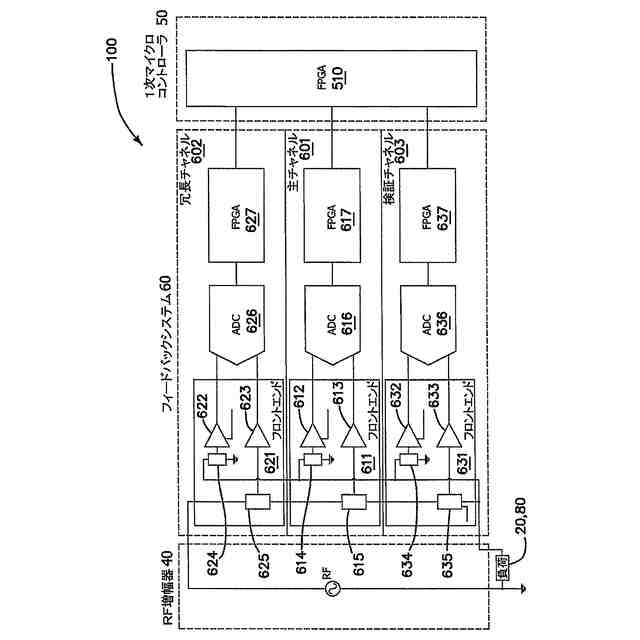
本発明の一態様により、電気手術RFエネルギを手術部位に供給する電気手術発生器と共に使用するためのデジタル閉ループ制御システムを提供する。デジタル閉ループ制御システムは、供給されたRFエネルギの電気的性質を継続的にモニタし、かつそれに関連するデジタルRF信号を発生するフィードバックシステムと、あらゆる手術条件、作動条件、又は手順条件下で外科手順のための最適RF出力を提供するために複数のRF調整モードにわたって供給RFエネルギを発生するRF増幅器を調整かつ制御するように可変利得係数を用いて構成されたマイクロコントローラとを含むことができる。
【0008】
本発明の第2の態様により、電気手術器具を通して電気手術RFエネルギを手術部位に供給する電気手術発生器を動的に制御する方法を提供する。本方法は、複数のRF調整モードに対する望ましいRF設定値又はターゲット値を取り出して望ましいRF設定値でのRFエネルギを発生させる段階と、フィードバックシステムからの少なくとも1つのチャネルを通じてRF出力の電気特性を測定して測定データの実数及び虚数成分をマイクロコントローラに通信する段階とを含む。マイクロコントローラは、送信データを受信した後に、電力計算を実行して複数のRF調整モードの各々に対する測定データと組織インピーダンス負荷との大きさを取得する。
【0009】
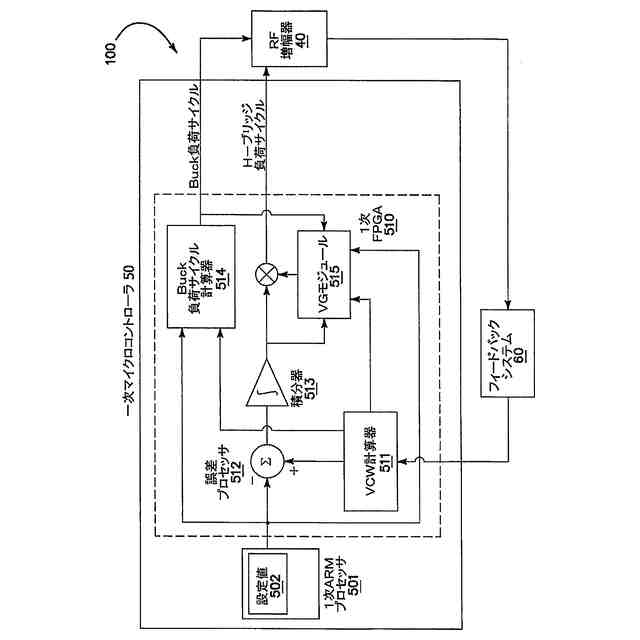
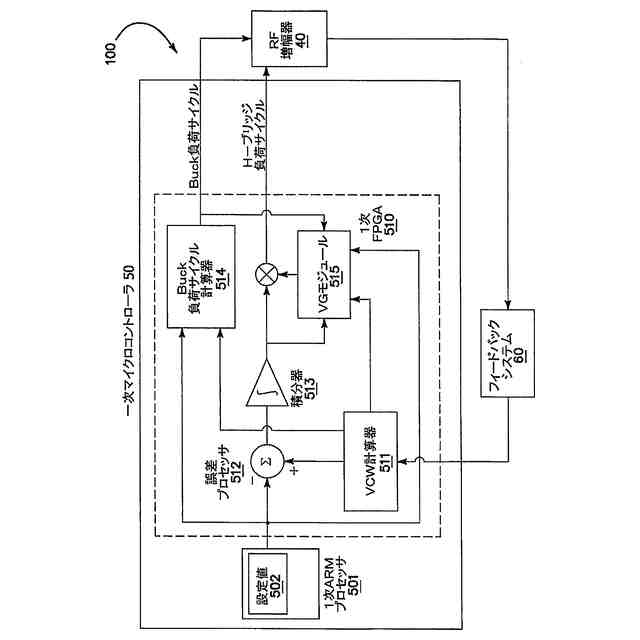
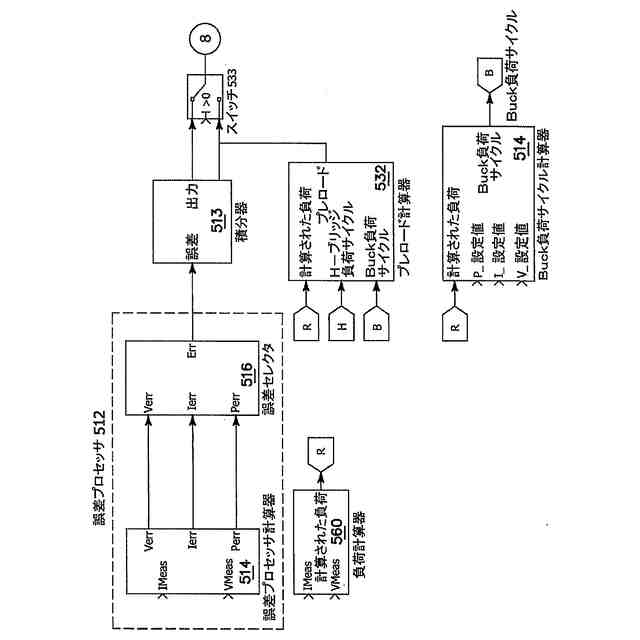
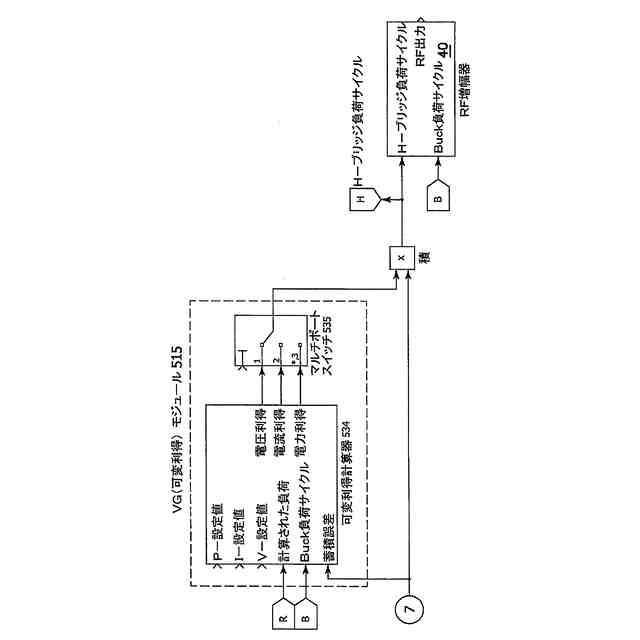
本方法は、誤差信号を複数のRF調整モードにわたって発生させ、1つの調整モードを計算誤差値に基づいて選択する段階と、特殊アルゴリズムを使用して複数の調整モードの各々に対して可変利得係数を計算し、1つの可変利得を計算誤差値に基づいて選択する段階と、電気手術発生器のRF増幅器のBuck及びH-ブリッジ回路のための出力制御信号を決定する段階と、発生器の望ましい出力値を維持するために出力制御信号に応答して電気手術発生器のRF出力の量を制御する段階とを更に含む。
【0010】
本発明の第3の態様により、外科手順を実行するための電気手術システムを提供する。電気手術システムは、RFエネルギを手術部位に供給するようになった電気手術発生器と、電気手術発生器に接続された電気手術器具とを含むことができる。電気手術器具は、電気手術RFエネルギを手術部位で組織に印加するようになった少なくとも1つの能動電極を有する。電気手術発生器は、複数のRF調整モードにわたって誤差信号を発生させて1つの調整モードを選択する段階と、複数の調整モードに対する可変利得係数を演算して1つの可変利得係数を選択する段階と、選択誤差信号を積分して積分信号を発生させて発生積分信号を選択可変利得係数によって乗算する段階と、予想出力電圧及び発生積分信号をそれぞれ使用してRF増幅器のBuck及びH-ブリッジ回路に対する負荷サイクルを駆動する段階とを引き起こすように構成された1次FPGA(完全プログラマブルゲートアレイ)を含むことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
錠剤撒き器
5か月前
個人
歯の掃除具
3か月前
個人
歯茎みが品
17日前
個人
マッサージ機
4日前
個人
乗馬テラピー
3か月前
個人
導電香
10日前
個人
塗り薬塗り具
2か月前
個人
身体牽引装置
3か月前
個人
収納容器
1か月前
個人
発熱器具
3か月前
個人
片足歩行支援具
25日前
個人
クリップ
24日前
個人
健康器具
2か月前
個人
染毛方法
2か月前
個人
磁器治療器
3か月前
個人
鼻腔拡張具
5か月前
個人
眼科診療車
1か月前
個人
挟圧手工爪矯正具
5か月前
株式会社コロナ
脱臭機
5か月前
個人
動体視力強化装置
3か月前
東レ株式会社
吸収制御剤
2か月前
個人
避難困難者救出台車
1か月前
個人
口腔ケア用歯ブラシ
5か月前
株式会社ナカニシ
生検針
3か月前
個人
血管硬化度算出方法
4か月前
東レ株式会社
下肢着用具
3か月前
個人
除菌システム
25日前
株式会社コーセー
美爪料
25日前
株式会社 MTG
浴用剤
11日前
株式会社コーセー
化粧料
25日前
株式会社ニデック
眼科装置
3か月前
株式会社ニデック
眼科装置
24日前
株式会社ニデック
眼科装置
5か月前
個人
唾液分泌促進具
3か月前
株式会社ニデック
眼科装置
5か月前
株式会社ファンケル
化粧料
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ