TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025016125
公報種別
公開特許公報(A)
公開日
2025-01-31
出願番号
2023119185
出願日
2023-07-21
発明の名称
曲率推定装置、車両制御装置及び曲率推定プログラム
出願人
株式会社アドヴィックス
,
株式会社J-QuAD DYNAMICS
,
株式会社デンソー
,
株式会社アイシン
,
株式会社ジェイテクト
代理人
個人
,
個人
主分類
B60W
40/114 20120101AFI20250124BHJP(車両一般)
要約
【課題】車両の走行軌道の曲率を精度良く取得できる曲率推定装置、車両制御装置及び曲率推定プログラムを提供する。
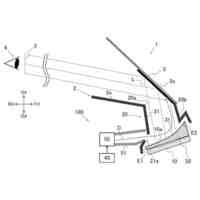
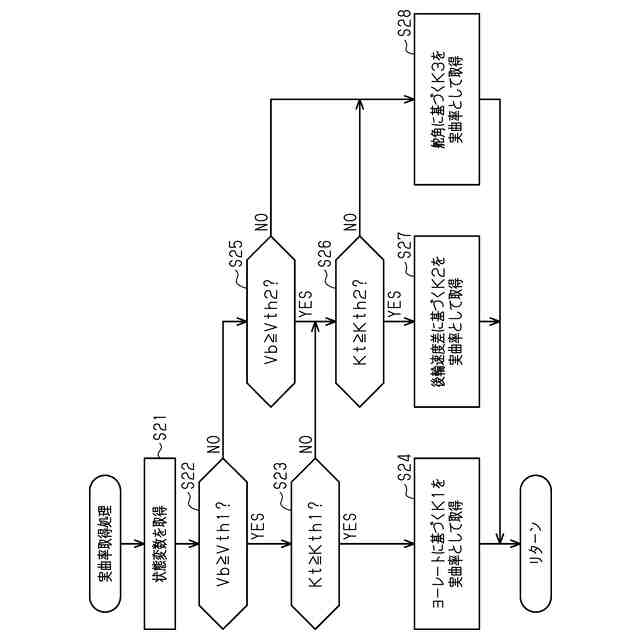
【解決手段】曲率推定装置100は、車両10の走行軌道の曲率である実曲率を取得する実曲率取得部102を備える。実曲率取得部102は、車体速度が第1速度判定値以上の場合には、ヨーレートに基づく走行軌道の曲率の演算値である第1曲率演算値を実曲率として取得する。一方、実曲率取得部102は、車体速度が第1速度判定値未満の場合には、後輪23,24の速度差に基づく走行軌道の曲率の演算値である第2曲率演算値を実曲率として取得する。
【選択図】図1
特許請求の範囲
【請求項1】
車輪速度センサの検出結果に基づいて車両の右輪の車輪速度及び前記車両の左輪の車輪速度を取得し、ヨーレートセンサの検出結果に基づいて前記車両のヨーレートを取得する状態変数取得部と、
前記車両の走行軌道の曲率である実曲率を取得する実曲率取得部と、を備え、
前記実曲率取得部は、
車体速度が第1速度判定値以上の場合には、前記ヨーレートに基づく前記走行軌道の曲率の演算値である第1曲率演算値を、前記実曲率として取得し、
前記車体速度が前記第1速度判定値未満の場合には、前記右輪の車輪速度と前記左輪の車輪速度との速度差に基づく前記走行軌道の曲率の演算値である第2曲率演算値を、前記実曲率として取得する
曲率推定装置。
続きを表示(約 1,300 文字)
【請求項2】
前記状態変数取得部は、舵角センサの検出結果に基づいて前記車両の転舵輪の舵角を取得し、
前記実曲率取得部は、前記車体速度が前記第1速度判定値よりも小さな第2速度判定値未満の場合に、前記舵角に基づく前記走行軌道の曲率の演算値である第3曲率演算値を、前記実曲率として取得する
請求項1に記載の曲率推定装置。
【請求項3】
前記右輪及び前記左輪を有する車輪と、前記車輪の舵角を調整する転舵装置と、を備える前記車両に適用され、前記転舵装置に指示舵角を出力することによって目標軌道に沿う前記車両の走行を支援する車両制御装置であって、
請求項1に記載の曲率推定装置と、
前記目標軌道の曲率である目標曲率を取得する目標曲率取得部と、
前記実曲率が前記目標曲率に近付くよう前記目標曲率と前記実曲率とに基づくフィードバック制御によって前記指示舵角を演算する指示舵角演算部と、を備え、
前記実曲率取得部は、前記車体速度が前記第1速度判定値以上である場合であっても、前記目標曲率が第1曲率判定値未満である場合には、前記第2曲率演算値を前記実曲率として取得する
車両制御装置。
【請求項4】
前記右輪及び前記左輪を有する車輪と、前記車輪の前記舵角を調整する転舵装置と、を備える前記車両に適用され、前記転舵装置に指示舵角を出力することによって目標軌道に沿う前記車両の走行を支援する車両制御装置であって、
請求項2に記載の曲率推定装置と、
前記目標軌道の曲率である目標曲率を取得する目標曲率取得部と、
前記実曲率が前記目標曲率に近付くよう前記目標曲率と前記実曲率とに基づくフィードバック制御によって前記指示舵角を演算する指示舵角演算部と、を備え、
前記実曲率取得部は、
前記車体速度が前記第1速度判定値以上である場合であっても、前記目標曲率が第1曲率判定値未満かつ前記第1曲率判定値よりも小さな第2曲率判定値以上の場合には、前記第2曲率演算値を前記実曲率として取得し、
前記車体速度が前記第2速度判定値以上である場合であっても、前記目標曲率が前記第2曲率判定値未満の場合には、前記第3曲率演算値を前記実曲率として取得する
車両制御装置。
【請求項5】
車輪速度センサの検出結果に基づいて車両の右輪の車輪速度及び前記車両の左輪の車輪速度を取得し、ヨーレートセンサの検出結果に基づいて前記車両のヨーレートを取得する状態変数取得処理と、
前記車両の走行軌道の曲率である実曲率を取得する実曲率取得処理と、を前記車両の制御装置に実行させる曲率推定プログラムであって、
前記実曲率取得処理は、
車体速度が第1速度判定値以上の場合には、前記ヨーレートに基づく前記走行軌道の曲率の演算値である第1曲率演算値を、前記実曲率として取得し、
前記車体速度が前記第1速度判定値未満の場合には、前記右輪の車輪速度と前記左輪の車輪速度との速度差に基づく前記走行軌道の曲率の演算値である第2曲率演算値を、前記実曲率として取得する
曲率推定プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、曲率推定装置、車両制御装置及び曲率推定プログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、車両を目標軌道に沿って走行させるために、車両の操舵角を制御する車両制御装置が記載されている。車両制御装置は、目標軌道上に設定される目標位置と現在位置との偏差に基づいて、車両の操舵角を演算する。そして、車両制御装置は、演算した車両の操舵角により、車両の転舵制御を実行する。
【先行技術文献】
【特許文献】
【0003】
特開2020-32828号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のような車両用制御装置において、転舵制御の制動を向上させるためには、車両の現在位置を精度良く取得することが望ましい。一例として、車両の現在位置は、車両の走行軌道の曲率である実曲率から求めることができる。つまり、車両用制御装置は、実曲率を精度良く取得できれば、車両の現在位置を精度良く取得できる。
【課題を解決するための手段】
【0005】
上記課題を解決する曲率推定装置は、車輪速度センサの検出結果に基づいて車両の右輪の車輪速度及び前記車両の左輪の車輪速度を取得し、ヨーレートセンサの検出結果に基づいて前記車両のヨーレートを取得する状態変数取得部と、前記車両の走行軌道の曲率である実曲率を取得する実曲率取得部と、を備え、前記実曲率取得部は、車体速度が第1速度判定値以上の場合には、前記ヨーレートに基づく前記走行軌道の曲率の演算値である第1曲率演算値を、前記実曲率として取得し、前記車体速度が前記第1速度判定値未満の場合には、前記右輪の車輪速度と前記左輪の車輪速度との速度差に基づく前記走行軌道の曲率の演算値である第2曲率演算値を、前記実曲率として取得する。
【0006】
上記課題を解決する車両制御装置は、前記右輪及び前記左輪を有する車輪と、前記車輪の舵角を調整する転舵装置と、を備える車両に適用され、前記転舵装置に指示舵角を出力することによって目標軌道に沿う前記車両の走行を支援する車両制御装置であって、上記の曲率推定装置を備える。
【0007】
上記課題を解決する曲率推定プログラムは、車輪速度センサの検出結果に基づいて車両の右輪の車輪速度及び前記車両の左輪の車輪速度を取得し、ヨーレートセンサの検出結果に基づいて前記車両のヨーレートを取得する状態変数取得処理と、前記車両の走行軌道の曲率である実曲率を取得する実曲率取得処理と、を車両の制御装置に実行させる曲率推定プログラムであって、前記実曲率取得処理は、車体速度が第1速度判定値以上の場合には、前記ヨーレートに基づく前記走行軌道の曲率の演算値である第1曲率演算値を、前記実曲率として取得し、前記車体速度が前記第1速度判定値未満の場合には、前記右輪の車輪速度と前記左輪の車輪速度との速度差に基づく前記走行軌道の曲率の演算値である第2曲率演算値を、前記実曲率として取得する。
【発明の効果】
【0008】
曲率推定装置、車両制御装置及び曲率推定プログラムは、車両の走行軌道の曲率を精度良く取得できる。
【図面の簡単な説明】
【0009】
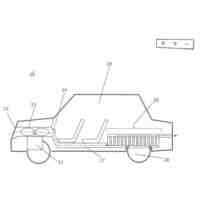
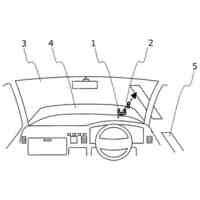
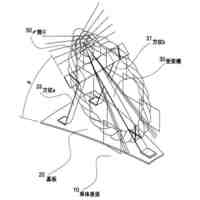
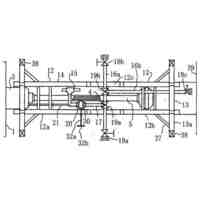
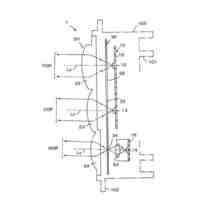
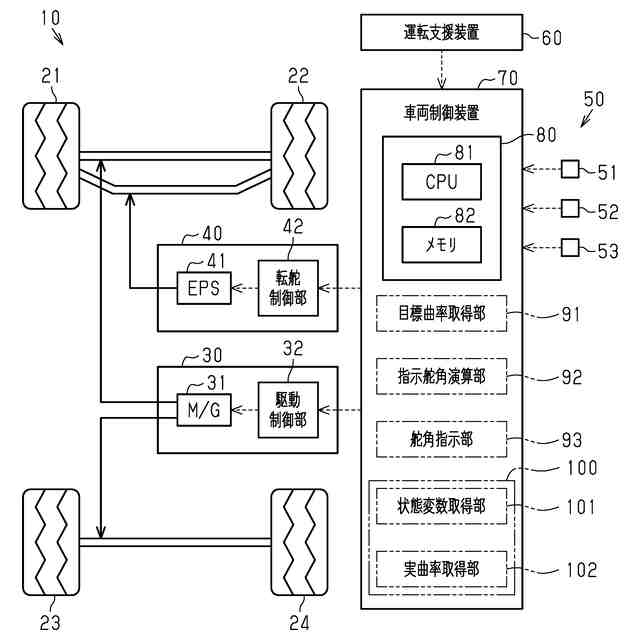
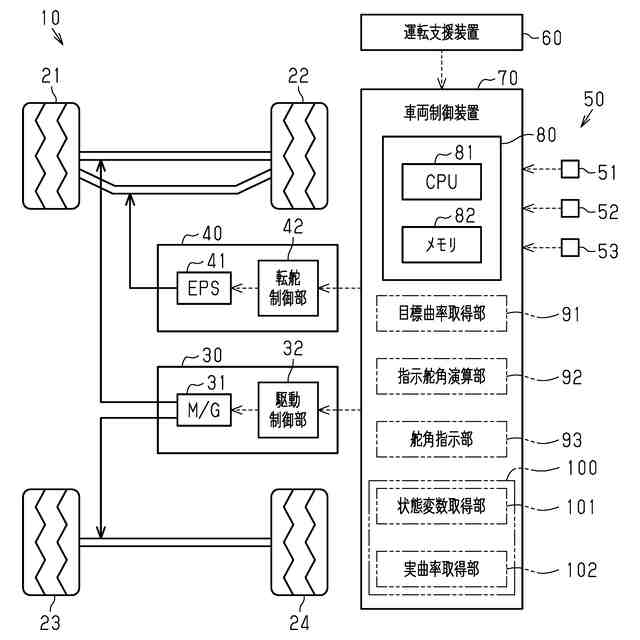
図1は、車両の概略構成を示す模式図である。
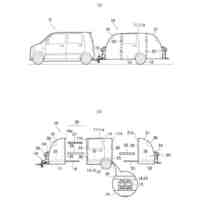
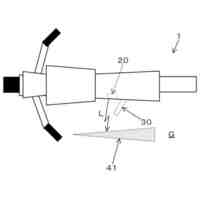
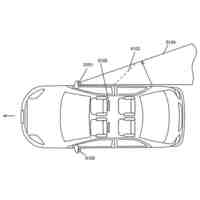
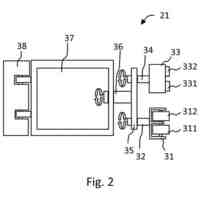
図2は、自動駐車時の車両の目標軌道の一例を示す模式図である。
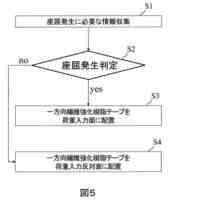
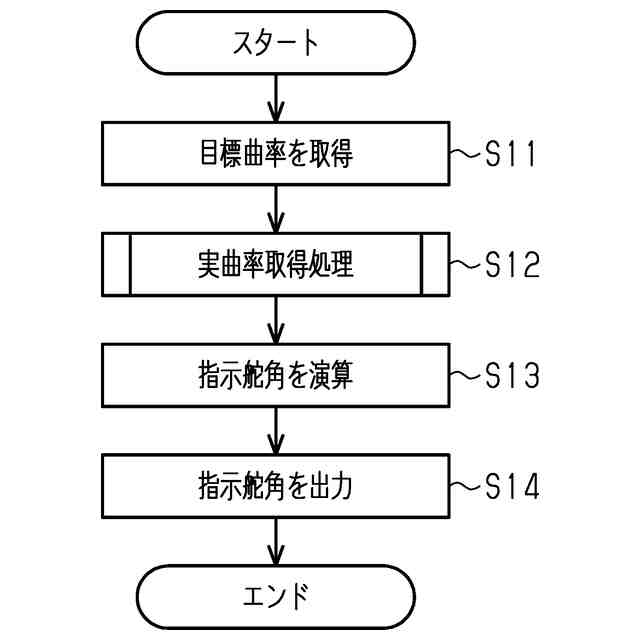
図3は、指示舵角を出力するために車両制御装置が実施する処理の流れを示すフローチャートである。
図4は、実曲率を取得するために車両制御装置が実施する処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、車両制御装置及び車両制御プログラムの一実施形態について説明する。
<本実施形態の構成>
図1に示すように、車両10は、前輪21,22と、後輪23,24と、駆動装置30と、転舵装置40と、検出系50と、運転支援装置60と、車両制御装置70と、を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両
2か月前
個人
眼科手術車
23日前
個人
授乳用車両
15日前
個人
自動車運転補助装置
2か月前
井関農機株式会社
作業車両
15日前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1日前
井関農機株式会社
作業車両
1か月前
個人
キャンピングトレーラー
1か月前
個人
台車用車輪止め具
24日前
個人
自動車外部装着用しめ飾り
2か月前
日本精機株式会社
車載表示装置
2か月前
エムケー精工株式会社
洗車装置
3か月前
日本精機株式会社
車載表示装置
1か月前
個人
謝意シグナル装着車
1か月前
日本精機株式会社
車両用表示装置
15日前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
3か月前
株式会社青木製作所
タンクローリ
24日前
マツダ株式会社
車両
8日前
トヨタ自動車株式会社
車両
2か月前
日本精機株式会社
車両用表示装置
2か月前
トヨタ自動車株式会社
車両
24日前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
1か月前
株式会社小糸製作所
投影装置
12日前
株式会社コーワ
フィルター清掃装置
3か月前
ダイハツ工業株式会社
バッグ
2か月前
日本化薬株式会社
ガス発生器
3か月前
東レ株式会社
車両用部材の補強方法
1か月前
YKS特許評価株式会社
自動車
2か月前
トヨタ自動車株式会社
搬送装置
2か月前
株式会社アイシン
車高調整装置
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ