TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025014523
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023117151
出願日
2023-07-18
発明の名称
歩行動作補助装置の制御装置及び制御方法
出願人
医療法人社団飛翔会
,
株式会社スペース・バイオ・ラボラトリーズ
代理人
個人
主分類
A61H
3/00 20060101AFI20250123BHJP(医学または獣医学;衛生学)
要約
【課題】実際に歩行した際のユーザの違和感を低減させ安定した歩行を実現し得る歩行動作補助技術を提供する。
【解決手段】歩行動作補助装置の制御装置は、ユーザの対象脚の一歩行周期中の現在の位相を特定可能な現位相情報を取得する手段と、その現位相情報に基づいてモータによる駆動機構の駆動を制御する制御処理手段とを備え、その制御処理手段は、当該前記現位相情報に基づいて駆動機構を底屈方向に回動させる底屈制御及び駆動機構を背屈方向に回動させる背屈制御を実行可能であり、当該現位相情報が一歩行周期中の足底接地状態に対応する位相を示す間の少なくとも一部である第一区間若しくは当該現位相情報が一歩行周期中の遊脚状態に対応する位相を示す間の少なくとも一部である第二区間の一方又は両方において、駆動機構をフリー状態とするフリー制御を実行する。
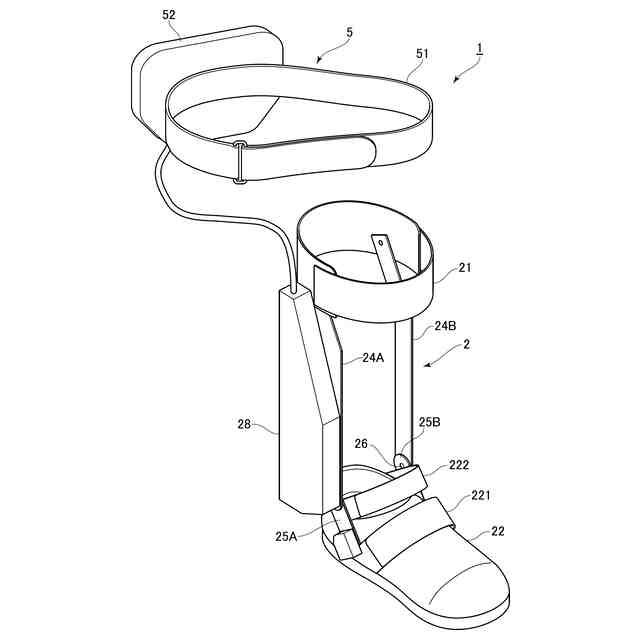
【選択図】図1
特許請求の範囲
【請求項1】
モータと、そのモータの駆動力により回動しユーザの対象脚の足関節の回動運動を補助可能な駆動機構とを少なくとも含む歩行動作補助装置の制御装置であって、
前記対象脚の一歩行周期中の現在の位相を特定可能な現位相情報を取得する取得手段と、
前記現位相情報に基づいて、前記モータによる前記駆動機構の駆動を制御する制御処理手段と、
を備え、
前記制御処理手段は、
前記現位相情報に基づいて前記駆動機構を底屈方向に回動させる底屈制御及び前記駆動機構を背屈方向に回動させる背屈制御を実行可能であり、
前記現位相情報が一歩行周期中の足底接地状態に対応する位相を示す間の少なくとも一部である第一区間若しくは前記現位相情報が一歩行周期中の遊脚状態に対応する位相を示す間の少なくとも一部である第二区間の一方又は両方において、前記駆動機構をフリー状態とするフリー制御を実行する、
歩行動作補助装置の制御装置。
続きを表示(約 2,500 文字)
【請求項2】
前記制御処理手段は、前記対象脚の一歩行周期内において、前記背屈制御に続けて前記第一区間の前記フリー制御を実行し、前記第一区間の前記フリー制御に続けて前記底屈制御及び前記背屈制御を順に実行し、前記背屈制御に続けて前記第二区間の前記フリー制御を実行する、
請求項1に記載の歩行動作補助装置の制御装置。
【請求項3】
前記制御処理手段は、前記現位相情報が一歩行周期中の前記遊脚状態に対応する位相を示す間、前記第二区間の前記フリー制御を継続する、
請求項2に記載の歩行動作補助装置の制御装置。
【請求項4】
前記制御処理手段は、前記第一区間の前記フリー制御の開始時点のほうが前記第二区間の前記フリー制御の開始時点よりも前記駆動機構の回動角度が背屈側に大きくなるように制御する、
請求項1から3のいずれか一項に記載の歩行動作補助装置の制御装置。
【請求項5】
前記対象脚の一歩行周期に対する前記駆動機構の時系列回動パターンを示す設定情報を保持する保持手段、
を更に備え、
前記設定情報は、一歩行周期中における位相が相互に異なる複数の設定点の各々に関して、一歩行周期中の位相とその位相における前記駆動機構の目標回動角度との対応情報をそれぞれ含み、
前記制御処理手段は、
前記現位相情報及び前記設定情報に基づいて、前記複数の設定点の各々においてその設定点の位相に対応するタイミングにその設定点の目標回動角度となるように前記背屈制御又は前記底屈制御を実行し、
前記設定情報において前記複数の設定点の中の位相が隣接する第一及び第二設定点の前記目標回動角度が同一である場合に、第一設定点の位相に対応するタイミングから第二設定点の位相に対応するタイミングまでの間では前記フリー制御を実行する、
請求項1に記載の歩行動作補助装置の制御装置。
【請求項6】
前記設定情報は、一歩行周期中の終了点の目標回動角度を示す情報を更に含み、
前記終了点に関する情報を表示装置に表示させるために前記保持手段に保持される前記設定情報をその表示装置に送信する送信手段と、
前記表示装置の表示に対して前記終了点の目標回動角度を変更するユーザ操作が行われた場合に、前記終了点の変更後の目標回動角度を示すように前記保持手段に保持される前記設定情報を更新する更新手段と、
を更に備える請求項5に記載の歩行動作補助装置の制御装置。
【請求項7】
前記歩行動作補助装置は、前記対象脚における踵接地状態、踵離地状態、つま先接地状態及びつま先離地状態を検出可能な検出手段を更に含み、
前記取得手段は、一歩行周期における開始点からの経過時間を前記現位相情報として取得すると共に、前記検出手段による検出情報を取得し、
フットフラット基準点は、一歩行周期における開始点からつま先が離地から接地へ転じるべき基準となる位相に対応し、
前記制御処理手段は、
前記設定情報において前記第一設定点が前記フットフラット基準点に相当するように設定されている場合には、前記現位相情報に基づいて前記第一設定点の位相に対応するタイミングに前記第一設定点の目標回動角度となるように前記背屈制御を実行し、
前記現位相情報により特定可能な前記第一設定点の位相に対応するタイミングにおいて前記検出情報が前記つま先接地状態を示さない場合には、前記駆動機構の回動角度を固定する固定制御又は前記フリー制御を開始する、
請求項5又は6に記載の歩行動作補助装置の制御装置。
【請求項8】
前記制御処理手段は、前記現位相情報により特定可能な前記第一設定点の位相に対応するタイミングにおいて前記検出情報が前記つま先接地状態を示さない場合には、前記検出情報が前記つま先接地状態を示したタイミングから所定の時間長で前記フリー制御を継続的に実行し、
前記所定の時間長は、前記設定情報に設定された前記第一設定点の位相及び前記第二設定点の位相との間の時間長とされる、
請求項7に記載の歩行動作補助装置の制御装置。
【請求項9】
前記歩行動作補助装置は、前記対象脚における踵接地状態、踵離地状態、つま先接地状態及びつま先離地状態を検出可能な検出手段を更に含み、
前記歩行動作補助装置の前記制御装置は、前記対象脚の一歩行周期におけるヒールオフ基準点の位相を少なくとも示すヒールオフ基準情報を保持する保持手段を更に備え、
前記ヒールオフ基準点は、一歩行周期における前記足底接地状態から踵が離地へ転じるべき基準となる位相に対応し、
前記取得手段は、一歩行周期中のヒールオフ基準点よりも前の基準点からの経過時間を前記現位相情報として取得すると共に、前記検出手段による検出情報を取得し、
前記制御処理手段は、前記現位相情報により特定可能な前記ヒールオフ基準点の位相に対応するタイミングで前記検出情報が前記踵接地状態を示している場合には、前記駆動機構の回動角度を固定する固定制御又は前記フリー制御を開始し、その後に前記検出情報が前記踵接地状態から前記踵離地状態への変化を示した際に、前記背屈制御又は前記底屈制御へ移行する、
請求項1に記載の歩行動作補助装置の制御装置。
【請求項10】
前記ヒールオフ基準点に関する情報を表示装置に表示させるために前記保持手段に保持される前記ヒールオフ基準情報をその表示装置に送信する送信手段と、
前記表示装置の表示に対して前記ヒールオフ基準点の位相を変更するユーザ操作が行われた場合に、変更後の前記ヒールオフ基準点の位相を示すように前記保持手段に保持される前記ヒールオフ基準情報を更新する更新手段と、
を更に備える請求項9に記載の歩行動作補助装置の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ユーザの足関節の回動運動を補助可能な歩行動作補助装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
歩行動作補助装置をユーザの脚に装着することで歩行訓練を円滑化する試みが行われている。
下記特許文献1には、駆動モータ、駆動モータにより足関節に対して同軸的に回動動作可能な駆動機構等を備えて、装着者の足関節の回動動作を補助する歩行動作補助装置が提案されている。この歩行動作補助装置では、歩行周期における時系列的な足関節角度の変化を表しかつ所定の複数点を屈曲点とする折れ線、ベジエ曲線又はこれらの組合せで表される動作パターンに基づいて駆動モータの駆動が制御される。
【先行技術文献】
【特許文献】
【0003】
特開2017-217039号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
歩行動作補助技術において、いかに苦痛なく安定した歩行を実現するかは重要な課題である。
本発明者らは、試行錯誤の結果、ユーザの足関節の回動運動を補助するうえで過剰な補助がユーザに違和感を生じさせてしまう、或いは無駄な動きを生じさせてしまうといった逆効果を生み出すことを見出した。
【0005】
本発明は、このような事情に鑑みてなされたものであり、実際に歩行した際のユーザの違和感を低減させ効率的で安定した歩行を実現し得る歩行動作補助技術を提供する。
【課題を解決するための手段】
【0006】
本発明の一態様は、モータと、そのモータの駆動力により回動しユーザの対象脚の足関節の回動運動を補助可能な駆動機構とを少なくとも含む歩行動作補助装置を制御する制御装置である。当該一態様に係る制御装置は、当該対象脚の一歩行周期中の現在の位相を特定可能な現位相情報を取得する取得手段と、その現位相情報に基づいて、モータによる駆動機構の駆動を制御する制御処理手段とを備え、その制御処理手段は、当該前記現位相情報に基づいて駆動機構を底屈方向に回動させる底屈制御及び駆動機構を背屈方向に回動させる背屈制御を実行可能であり、当該現位相情報が一歩行周期中の足底接地状態に対応する位相を示す間の少なくとも一部である第一区間若しくは当該現位相情報が一歩行周期中の遊脚状態に対応する位相を示す間の少なくとも一部である第二区間の一方又は両方において、駆動機構をフリー状態とするフリー制御を実行する。
【0007】
本発明の一態様は、モータと、そのモータの駆動力により回動しユーザの対象脚の足関節の回動運動を補助可能な駆動機構と、その対象脚の一歩行周期中の現在の位相を特定可能な現位相情報を取得する取得手段と、その現位相情報に基づいてモータによる駆動機構の駆動を制御する制御処理手段とを備える歩行動作補助装置によって実行される歩行動作補助方法である。当該一態様に係る歩行動作補助方法は、制御処理手段が、当該現位相情報に基づいて、駆動機構を底屈方向に回動させる底屈制御及び駆動機構を背屈方向に回動させる背屈制御を実行し、現位相情報が一歩行周期中の足底接地状態に対応する位相を示す間の少なくとも一部である第一区間若しくは現位相情報が一歩行周期中の遊脚状態に対応する位相を示す間の少なくとも一部である第二区間の一方又は両方において、駆動機構をフリー状態とするフリー制御を実行することを含む。
【0008】
また、本発明の他の態様として、上述の歩行動作補助方法を当該歩行動作補助装置が備える一以上のプロセッサに実行させるコンピュータプログラムであってもよいし、このようなコンピュータプログラムを記録する記録媒体であってもよい。
【発明の効果】
【0009】
本発明によれば、実際に歩行した際のユーザの違和感を低減させ効率的で安定した歩行を実現し得る歩行動作補助技術を提供することができる。
【図面の簡単な説明】
【0010】
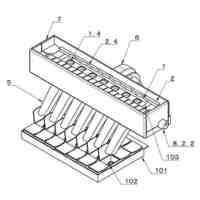
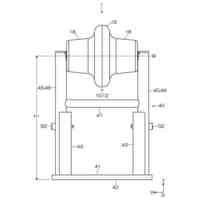
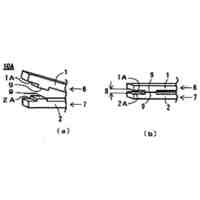
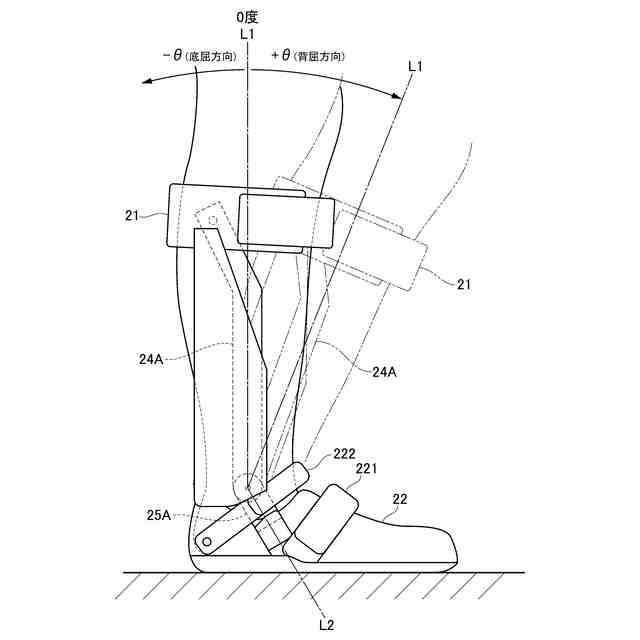
本実施形態に係る歩行動作補助装置の外観を示す斜視図である。
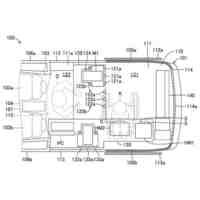
本実施形態に係る歩行動作補助装置の制御系のハードウェア構成を概念的に示す図である。
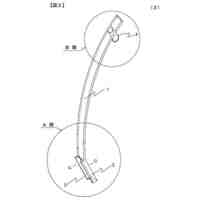
本実施形態における駆動機構の回動角度を説明するための模式図である。
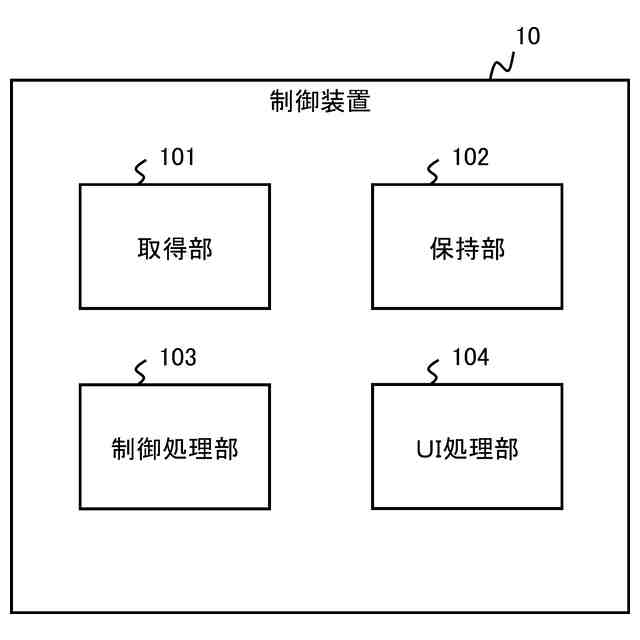
本実施形態における制御装置のソフトウェア構成を概念的に示す図である。
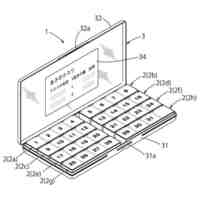
歩行補助設定画面の例を示す図である。
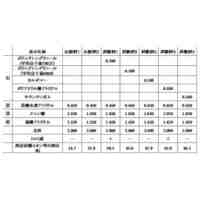
標準設定情報及びカスタマイズ設定情報の例を示す図である。
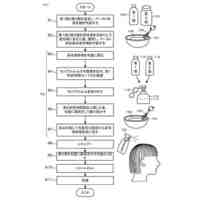
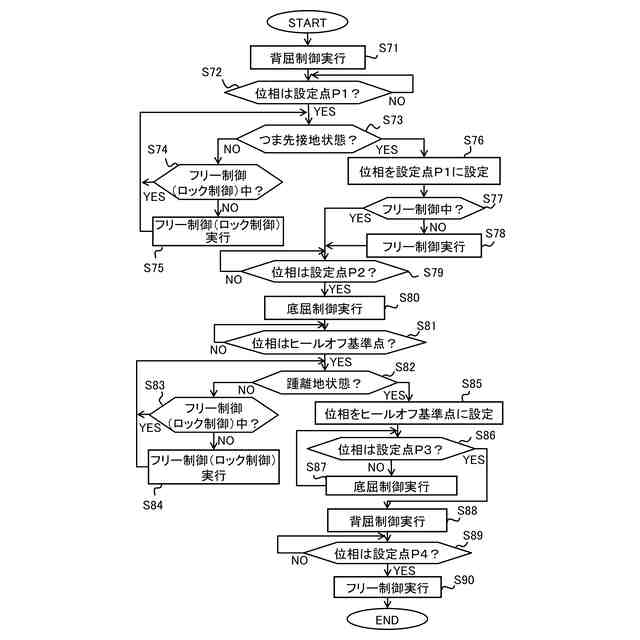
本実施形態に係る歩行動作補助装置の動作例を示すフローチャートである。
ヒールオフ基準情報の変形例及び標準設定情報の変形例を示す図である。
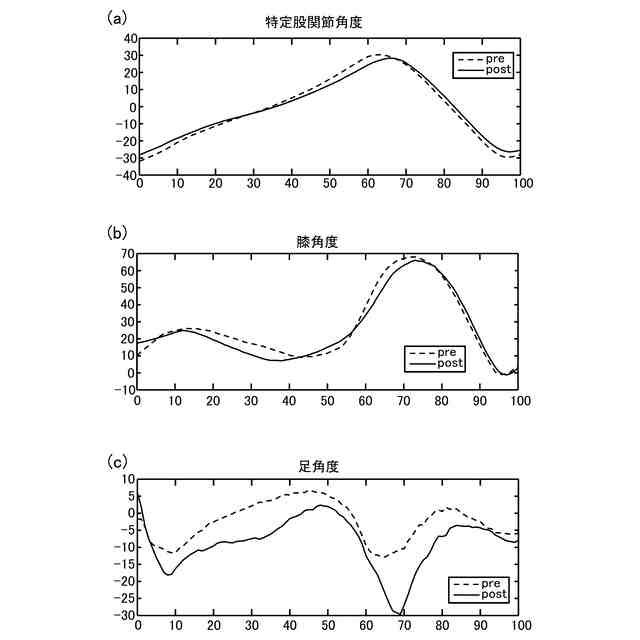
健常者である同一人物が何も装着せずに普通に歩行した第一の場合と本実施形態に係る歩行動作補助装置を装着して5歩、歩行した後に本装置を外して普通に歩行した第二の場合とにおける一歩行周期中の特定股関節角度、膝角度及び足関節角度の推移を示すグラフである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
健康器具
3日前
個人
歯の掃除具
3か月前
個人
錠剤撒き器
5か月前
個人
歯茎みが品
27日前
個人
身体牽引装置
3か月前
個人
マッサージ機
14日前
個人
乗馬テラピー
3か月前
個人
脈波測定方法
6日前
個人
塗り薬塗り具
2か月前
個人
導電香
20日前
個人
発熱器具
3か月前
個人
クリップ
1か月前
個人
染毛方法
3か月前
個人
片足歩行支援具
1か月前
個人
収納容器
2か月前
個人
健康器具
2か月前
個人
口内洗浄具
6日前
個人
眼科診療車
1か月前
株式会社コロナ
脱臭機
5か月前
個人
挟圧手工爪矯正具
5か月前
個人
動体視力強化装置
4か月前
個人
磁器治療器
3か月前
株式会社 MTG
浴用剤
21日前
個人
除菌システム
1か月前
個人
血管硬化度算出方法
4か月前
株式会社ナカニシ
生検針
3か月前
株式会社コーセー
美爪料
1か月前
株式会社コーセー
化粧料
1か月前
個人
避難困難者救出台車
1か月前
東レ株式会社
吸収制御剤
3か月前
東レ株式会社
下肢着用具
3か月前
株式会社ニデック
眼科装置
4か月前
株式会社ニデック
眼科装置
5か月前
株式会社ニデック
眼科装置
5か月前
株式会社ファンケル
化粧料
3か月前
株式会社ダリヤ
毛髪化粧料
6日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ