TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025014369
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023116868
出願日
2023-07-18
発明の名称
清掃装置
出願人
株式会社マキタ
代理人
名古屋国際弁理士法人
主分類
A47L
11/14 20060101AFI20250123BHJP(家具;家庭用品または家庭用設備;コーヒーひき;香辛料ひき;真空掃除機一般)
要約
【課題】モータの逆方向への回転中における使用を抑制可能な清掃装置を提供する。
【解決手段】清掃装置は、モータと、スイッチと、先端接続部と、複数の第1の爪と、制御部と、を備える。先端接続部は、先端アタッチメントが接続可能であり、モータの駆動力により回転する。第1の爪は、先端接続部の回転軸の周方向に沿って先端接続部に配置されている。複数の第1の爪は、先端接続部が正方向へ回転することに応じて先端アタッチメントが有する複数の第2の爪と係合し、先端接続部が逆方向へ回転することに応じて複数の第2の爪から離れる。制御部は、逆方向へのモータの回転中に、接続部の回転状態が第1の条件を満たした場合に、モータを停止させる。
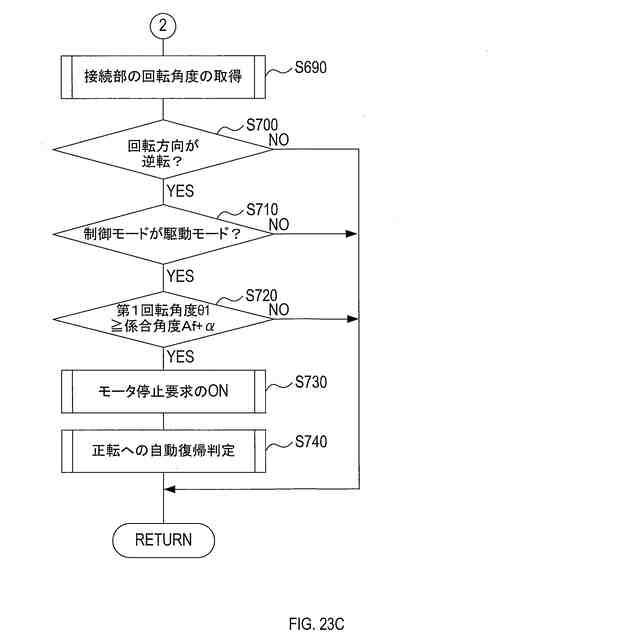
【選択図】図23C
特許請求の範囲
【請求項1】
先端アタッチメントが取り付け可能な清掃装置であって、
モータと、
前記モータの回転方向を正方向又は逆方向に切替えるために手動操作されるように構成された操作スイッチと、
前記先端アタッチメントが接続可能であり、且つ、前記モータの駆動力により回転するように構成された先端接続部と、
前記先端接続部の回転軸の周方向に沿って前記先端接続部に配置された複数の第1の爪であって、前記先端接続部が前記正方向へ回転することに応じて前記先端アタッチメントが有する複数の第2の爪と係合し、前記先端接続部が前記逆方向へ回転することに応じて前記複数の第2の爪から離れるように構成された複数の第1の爪と、
前記モータの駆動を制御するように構成された制御部であって、前記逆方向への前記モータの回転中に、前記先端接続部の回転状態が第1の条件を満たした場合に、前記モータを停止させるように構成された制御部と、を備える、
清掃装置。
続きを表示(約 1,600 文字)
【請求項2】
前記第1の条件は、前記先端接続部が、前記逆方向に係合角度以上回転した場合に成立し、
前記係合角度は、前記複数の第1の爪のうちの1つが前記複数の第2の爪のうちの1つと重なっており、且つ、前記複数の第1の爪のうちの1つと前記複数の第2の爪のうちの1つとの間に係合力が生じている領域に対応している、
請求項1に記載の清掃装置。
【請求項3】
前記第1の条件は、前記先端接続部が、前記モータの回転速度と係合角度とに応じた所定時間、前記逆方向へ回転した場合に成立し、
前記係合角度は、前記複数の第1の爪のうちの1つが前記複数の第2の爪のうちの1つと重なっており、且つ、前記複数の第1の爪のうちの1つと前記複数の第2の爪のうちの1つとの間に係合力が生じている領域に対応している、
請求項1に記載の清掃装置。
【請求項4】
前記制御部は、前記逆方向への前記モータの回転中に、前記モータの駆動状態が第2の条件を満たした場合に、前記回転方向を前記正方向へ変えるように構成されている、
請求項2又は3に記載の清掃装置。
【請求項5】
前記制御部は、更に、前記モータが受けている負荷が負荷閾値以上か判定するように構成されており、
前記第2の条件は、前記モータが受けている負荷が前記負荷閾値以上であるときに、前記先端接続部が、前記逆方向に前記係合角度以上回転した場合に成立する、
請求項4に記載の清掃装置。
【請求項6】
前記第2の条件は、前記モータの前記逆方向への駆動回数が所定回数以上である場合に成立し、
1回の駆動は、前記モータの回転開始から停止までに相当する、
請求項4又は5に記載の清掃装置。
【請求項7】
前記制御部は、
前記操作スイッチを介して前記回転方向が前記逆方向に切替えられた場合に、前記第1の爪を介して前記先端接続部に取り付けられた前記先端アタッチメントが、床面に押し付けられているか判定し、
前記先端アタッチメントが前記床面に押し付けられていないと判定された場合に、前記モータを直ちに停止させる、ように構成されている、
請求項1~6のいずれか1項に記載の清掃装置。
【請求項8】
前記モータに印加する電圧を制御するように構成された駆動回路を更に備え、
前記制御部は、
前記操作スイッチを介して前記回転方向が前記逆方向に切替えられた場合に、前記モータに第1の電圧が印加されるように前記駆動回路を制御して、前記先端アタッチメントが、前記床面に押し付けられているか判定し、
前記先端アタッチメントが、前記床面に押し付けられていると判定された場合に、前記第1の電圧よりも大きい第2の電圧が前記モータに印加されるように前記駆動回路を制御するように構成されている、
請求項7に記載の清掃装置。
【請求項9】
前記制御部は、
前記操作スイッチを介して前記回転方向が前記逆方向に切替えられた場合に、前記モータに第1のデューティ比を有するパルス幅変調信号が印加されるように前記駆動回路を制御して、前記先端アタッチメントが、前記床面に押し付けられているか判定し、
前記先端アタッチメントが、前記床面に押し付けられていると判定された場合に、前記第1のデューティ比を徐々に増加させるように構成されている、
請求項8に記載の清掃装置。
【請求項10】
前記制御部は、前記モータの回転状態に基づいて、前記先端アタッチメントが、前記床面に押し付けられているか判定するように構成されている、
請求項7~9のいずれか1項に記載の清掃装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、回転する先端アタッチメントが取り付けられる清掃装置に関する。
続きを表示(約 3,900 文字)
【背景技術】
【0002】
特許文献1に記載のスクラバーは、モータと、モータの軸に固着されたモータアダプタと、を有し、回転清掃具が取り付けられる。回転清掃具は、3個の係止フランジを備え、モータアダプタは、3個の係止爪を備える。3個の係止フランジが、3個の係止爪に嵌合することにより、回転清掃具がモータアダプタに取り付けられる。ユーザが、モータを逆方向へ回転させることにより、3個の係止フランジと3個の係止爪との嵌合が解除される。ひいては、ユーザは、手を使わずに、回転清掃具をモータアダプタから取り外すことができる。
【先行技術文献】
【特許文献】
【0003】
特開平7-327897号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ユーザが、モータが逆方向に回転していることに気づかずに上記スクラバーを使用して、作業中に回転清掃具がスクラバーから外れ、作業が中断されることが生じ得る。さらに、作業中に回転清掃具がスクラバーから外れた場合に、回転清掃具が人や物に当たる可能性がある。
【0005】
本開示の1つの局面は、モータの逆方向への回転中における使用を抑制可能な清掃装置を提供する。
【課題を解決するための手段】
【0006】
本開示の1つの局面の清掃装置は、先端アタッチメントが取り付け可能であって、モータと、操作スイッチと、先端接続部と、複数の第1の爪と、制御部と、を備える。操作スイッチは、モータの回転方向を正方向又は逆方向に切替えるために手動操作される。先端接続部は、先端アタッチメントが接続可能であり、且つ、モータの駆動力により回転する。複数の第1の爪は、先端接続部の回転軸の周方向に沿って先端接続部に配置されている。複数の第1の爪は、先端接続部が正方向へ回転することに応じて先端アタッチメントが有する複数の第2の爪と係合し、先端接続部が逆方向へ回転することに応じて複数の第2の爪から離れる。制御部は、モータの駆動を制御する。制御部は、逆方向へのモータの回転中に、先端接続部の回転状態が第1の条件を満たした場合に、モータを停止させる。
【0007】
本開示の1つの局面の清掃装置は、逆方向へのモータの回転中に、先端接続部の回転状態が第1の条件を満たした場合に、モータを停止させる。したがって、ユーザが、モータが逆方向に回転していることに気づかずに、清掃装置を使用することを抑制できる。
【図面の簡単な説明】
【0008】
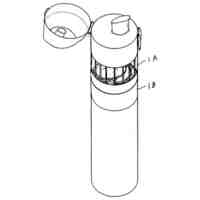
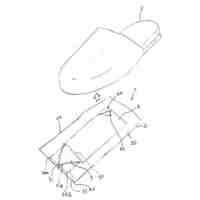
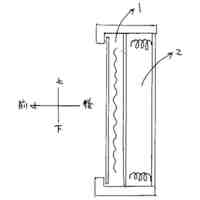
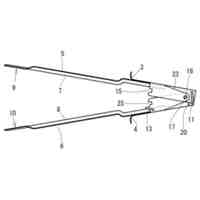
第1実施形態に係る清掃装置の外観を示す図である。
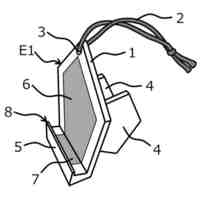
第1実施形態に係る清掃装置の表示部を示す図である。
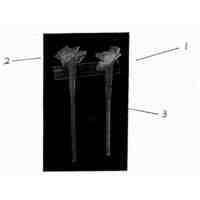
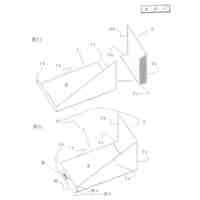
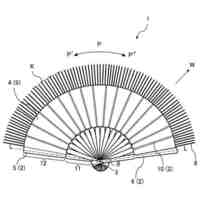
第1実施形態に係る清掃装置に接続される先端アタッチメントを示す図である。
第1実施形態の第1例に係る先端アタッチメントの下面を示す図である。
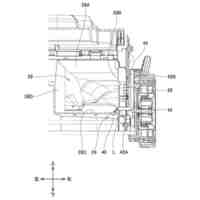
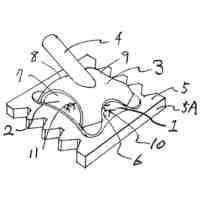
第1実施形態に係る清掃装置の先端接続部の下面を示す図である。
第1実施形態に係る清掃装置の先端接続部の斜視図である。
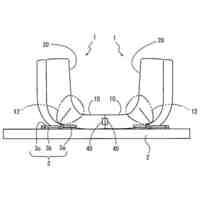
第1実施形態に係る清掃装置の先端接続部に第1例に係る先端アタッチメントが接続している状態を示す図である。
第1実施形態の第2例に係る先端アタッチメントの下面を示す図である。
第1実施形態に係る清掃装置の先端接続部に第2例に係る先端アタッチメントが接続している状態を示す図である。
第1実施形態に係る清掃装置の第1の爪とブラシの第2の爪との係合角度を示す図である。
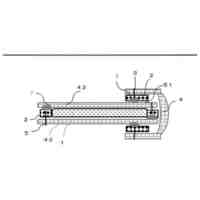
第1実施形態に係る清掃装置の第1の爪の径方向に沿った断面を示す図である。
第1実施形態に係る清掃装置の第1の爪、及び、第1の爪に係合した第2の爪の径方向に沿った断面を示す図である。
第1実施形態に係る清掃装置の第1の爪の周方向に沿った断面を示す図である。
第1実施形態に係る清掃装置の第1の爪、及び第1の爪に係合した第2の爪の周方向に沿った断面を示す図である。
第1実施形態に係る清掃装置の電気的構成を示すブロック図である。
第1実施形態に係る清掃装置のマイコンが実行するメイン処理を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する割込み処理を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行するスイッチ操作検出処理を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する電源管理処理を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する主電源状態のオフ判定処理を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する主電源状態の自動オフ判定処理を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行するモータ制御処理を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する速度モードの設定処理を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する回転方向の設定処理の第1部分を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する回転方向の設定処理の第2部分を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する回転方向の設定処理の第3部分を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する先端接続部の回転角度の取得処理の第1例を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する先端接続部の回転角度の取得処理の第2例を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する正転への自動復帰判定処理の第1例を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する正転への自動復帰判定処理の第2例を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する正転への自動復帰判定処理の第3例を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する第2回転角度に基づく自動復帰判定処理を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する逆転での駆動回数に基づく自動復帰判定処理を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する状態遷移処理を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行する回転角度の計算処理を示すフローチャートである。
第1実施形態に係る清掃装置のマイコンが実行するインバータ制御処理を示すフローチャートである。
第1実施形態に係る清掃装置のモータの速度モードに応じた目標回転速度を示す図である。
第2実施形態に係る清掃装置のマイコンが実行する回転方向の設定処理の第3部分を示すフローチャートである。
第2実施形態に係る清掃装置のマイコンが実行する押し当て判定処理の第1例を示すフローチャートである。
第2実施形態に係る清掃装置のマイコンが実行する押し当て判定処理の第2例を示すフローチャートである。
第2実施形態に係る清掃装置のマイコンが実行する状態遷移処理を示すフローチャートである。
第2実施形態に係る、先端アタッチメントを床面に押し当てている場合における、押し当判定中及び判定完了後の出力デューティ比とモータの回転角度とを示す図である。
第2実施形態に係る、先端アタッチメントを床面に押し当てていない場合における、押し当て判定中及び判定完了後の出力デューティ比とモータの回転角度を示す図である。
【発明を実施するための形態】
【0009】
(実施形態の総括)
ある実施形態は、以下の特徴1~7のうちの少なくとも一つを備えている、先端アタッチメントが取り付け可能な清掃装置を提供してもよい。
・特徴1:モータと。
・特徴2:モータの回転方向を正方向又は逆方向に切替えるために手動操作されるように構成された操作スイッチ。
・特徴3:先端アタッチメントが接続可能であり、且つ、モータの駆動力により回転するように構成された先端接続部。
・特徴4:先端接続部の回転軸の周方向に沿って先端接続部に配置された複数の第1の爪。
・特徴5:複数の第1の爪は、先端接続部が正方向へ回転することに応じて先端アタッチメントが有する複数の第2の爪と係合し、先端接続部が前記逆方向へ回転することに応じて複数の第2の爪から離れる。
・特徴6:モータの駆動を制御するように構成された制御部。
・特徴7:制御部は、逆方向へのモータの回転中に、先端接続部の回転状態が第1の条件を満たした場合に、モータを停止させる。
【0010】
少なくとも特徴1~7を備えている清掃装置は、逆方向へのモータの回転中に、先端接続部の回転状態が第1の条件を満たした場合に、モータを停止させる。したがって、ユーザが、モータが逆方向に回転していることに気づかずに、清掃装置を使用することを抑制できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
作業機
11日前
株式会社マキタ
ケース
12日前
株式会社マキタ
電動工具
11日前
株式会社マキタ
電動工具
18日前
株式会社マキタ
電動工具
26日前
株式会社マキタ
支持ユニット
15日前
株式会社マキタ
集塵アタッチメント
11日前
個人
枕
11か月前
個人
椅子
9か月前
個人
鍋蓋
6か月前
個人
焼き網
9か月前
個人
掃除機
5日前
個人
乾燥器具
5か月前
個人
耳拭き棒
2か月前
個人
スプーン
11か月前
個人
体洗い具
1か月前
個人
枕
1日前
個人
掃除道具
4日前
個人
エコ掃除機
7か月前
個人
皮引き俎板
10か月前
個人
商品トレー
12か月前
個人
掃除シート
25日前
個人
寝具補助具
11か月前
個人
片手代替具
2か月前
個人
省煙消臭器
4日前
個人
エコ掃除機
3か月前
個人
収納型額縁
4か月前
個人
絵馬
10か月前
個人
食器皿セット
12か月前
個人
卓上用清掃具
10か月前
個人
折り畳み椅子
4か月前
個人
宅配ボックス
10か月前
個人
転倒防止装置
11か月前
個人
学童机
5か月前
個人
コップの取手
10か月前
個人
食品用トング
5か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ