TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025014359
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023116853
出願日
2023-07-18
発明の名称
産業用ロボットおよび産業用ロボットの制御方法
出願人
ニデックインスツルメンツ株式会社
代理人
個人
主分類
H01L
21/68 20060101AFI20250123BHJP(基本的電気素子)
要約
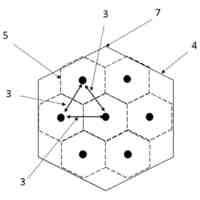
【課題】搬出部から搬入部に搬送対象物を搬送する産業用ロボットにおいて、機械的な制約によって搬出部および搬入部のいずれか一方で産業用ロボットのハンドの位置および向きを適切に補正することができなくても、搬出部から搬入部に搬送対象物を適切に搬送することが可能な産業用ロボットを提供する。
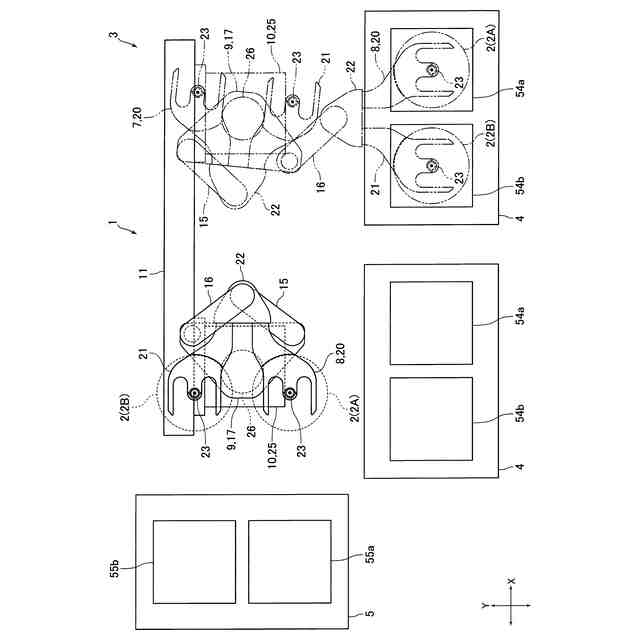
【解決手段】産業用ロボット1の制御部には、搬出部5で正規の位置に配置される搬送対象物2の、設計上の位置からのずれに基づいてハンド7、8の位置および向きを補正するための搬出側補正値と、搬入部4で正規の位置に配置される搬送対象物2の、設計上の位置からのずれに基づいてハンド7、8の位置および向きを補正するための搬入側補正値とが予め記憶されている。産業用ロボット1は、搬出部5ではハンド7、8の位置および向きを補正せずに、搬入部4において搬出側補正値および搬入側補正値に基づいてハンド7、8の位置および向きを補正する。
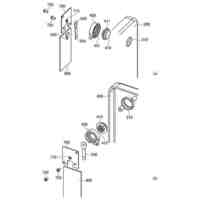
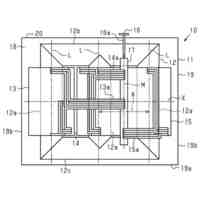
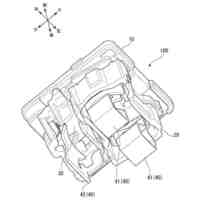
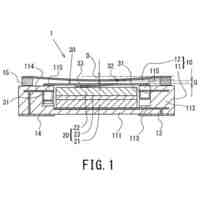
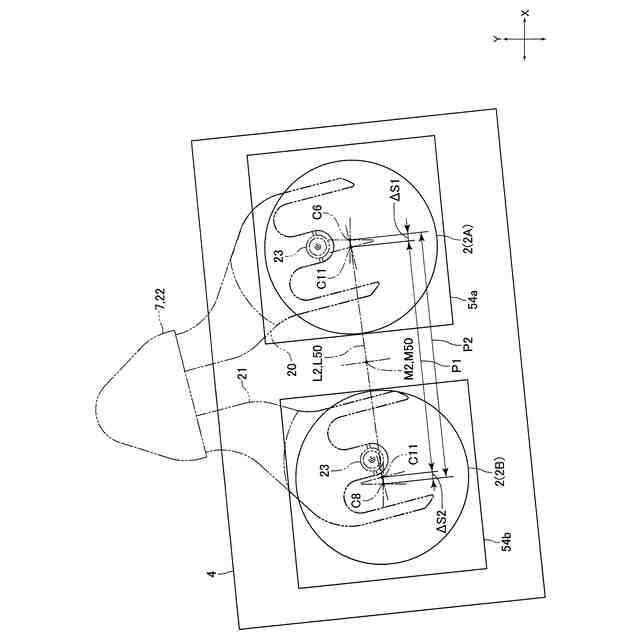
【選択図】図1
特許請求の範囲
【請求項1】
搬送対象物が配置可能な搬出部から前記搬送対象物が配置可能な搬入部に前記搬送対象物を搬送する産業用ロボットであって、
前記搬送対象物が搭載されるハンドと、前記ハンドが連結されるアームと、前記アームが回動可能に連結される本体部と、水平方向への直線的な移動が可能となるように前記本体部を保持する本体保持部と、前記本体保持部に対して前記本体部を移動させる水平移動機構と、上下方向を回動の軸方向として前記本体部に対して前記アームを回動させるとともに一定方向を向いた状態の前記ハンドを前記本体部に対して水平方向に直線的に移動させるハンド駆動機構と、前記産業用ロボットを制御するための制御部とを備え、
前記制御部には、前記搬出部において正規の位置に配置される前記搬送対象物の、設計上の位置からのずれに基づいて前記ハンドの位置および向きを補正するための搬出側補正値と、前記搬入部において正規の位置に配置される前記搬送対象物の、設計上の位置からのずれに基づいて前記ハンドの位置および向きを補正するための搬入側補正値とが予め記憶され、
前記本体保持部に対する前記本体部の移動方向を第1方向とし、前記第1方向と上下方向とに直交する方向を第2方向とすると、
前記ハンドは、設計上、前記搬出部および前記搬入部のいずれか一方に対して前記第1方向に直線的に移動するとともに、前記搬出部および前記搬入部のいずれか他方に対して前記第2方向に直線的に移動し、
前記制御部は、前記搬出部および前記搬入部のいずれか一方では、前記ハンドの位置および向きを補正せず、前記搬出部および前記搬入部のいずれか他方では、前記搬出側補正値および前記搬入側補正値に基づいて前記ハンドの位置および向きを補正することを特徴とする産業用ロボット。
続きを表示(約 2,000 文字)
【請求項2】
水平多関節型のロボットであり、
前記ハンドは、前記アームに回動可能に連結され、
前記ハンド駆動機構は、上下方向を回動の軸方向として前記本体部に対して前記アームを回動させるとともに前記ハンドが一定方向を向いた状態で前記本体部に対して水平方向に直線的に移動するように前記アームを伸縮させるアーム駆動機構であることを特徴とする請求項1記載の産業用ロボット。
【請求項3】
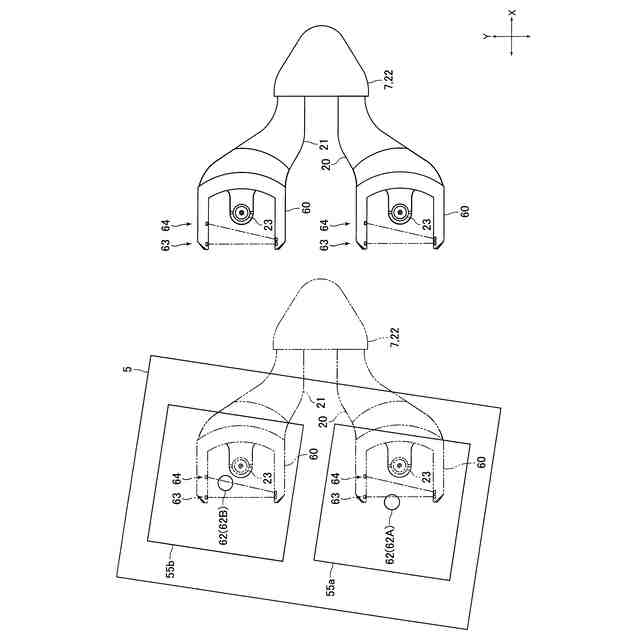
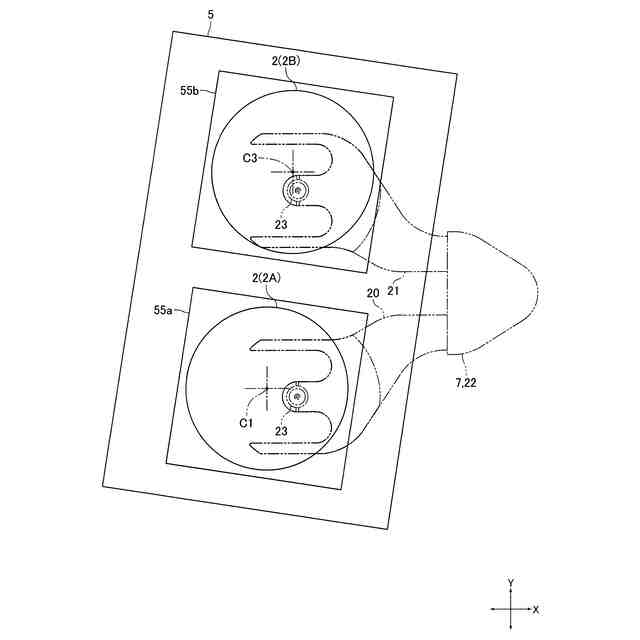
前記ハンドとしての第1ハンドおよび第2ハンドを備え、
前記第1ハンドは、前記第2ハンドよりも下側に配置され、
前記アームは、前記第1ハンドが先端側に回動可能に連結される第1先端側アーム部と、前記第2ハンドが先端側に回動可能に連結される第2先端側アーム部と、前記第1先端側アーム部の基端側および前記第2先端側アーム部の基端側が回動可能に連結される共通アーム部とを備えることを特徴とする請求項2記載の産業用ロボット。
【請求項4】
上下方向で重なっていない状態の2個の前記搬送対象物を前記搬出部から前記搬入部に一緒に搬送し、
前記搬出部および前記搬入部には、上下方向で重なっていない状態の2個の前記搬送対象物が配置可能になっており、
前記ハンドは、1個の前記搬送対象物が搭載される第1搭載部と、1個の前記搬送対象物が搭載される第2搭載部とを備え、
前記ハンドには、上下方向で重なっていない状態の2個の前記搬送対象物が搭載されることを特徴とする請求項1から3のいずれかに記載の産業用ロボット。
【請求項5】
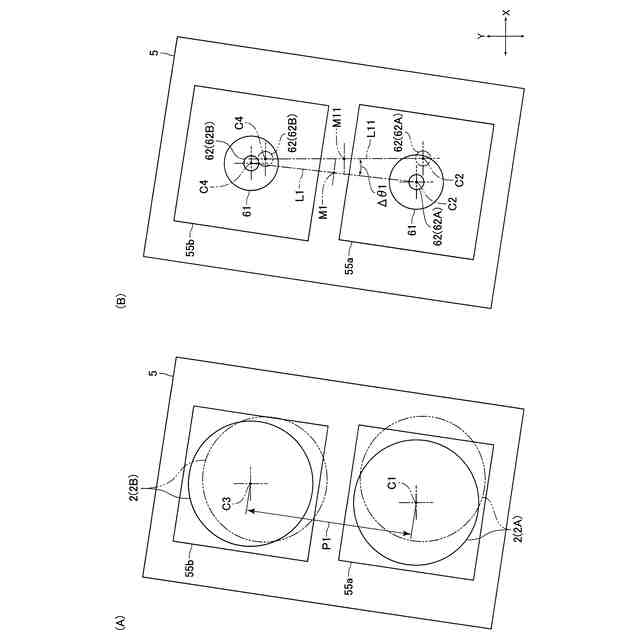
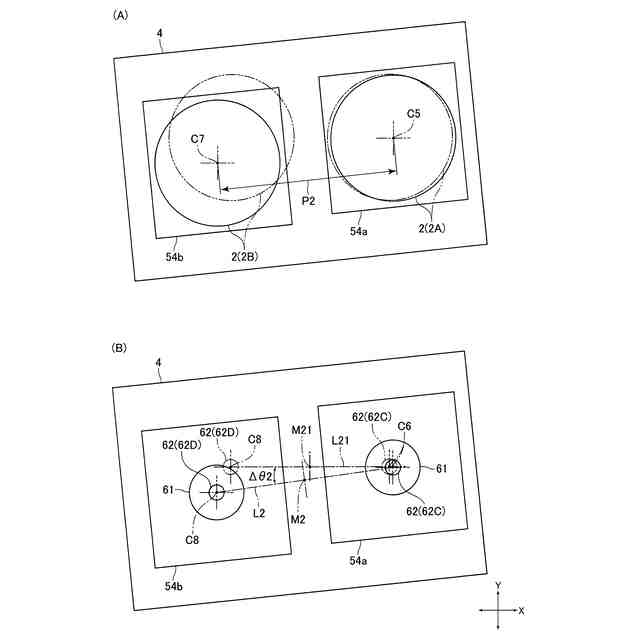
前記第1搭載部に搭載される前記搬送対象物を第1搬送対象物とし、前記第2搭載部に搭載される前記搬送対象物を第2搬送対象物とし、前記搬出部の、前記第1搬送対象物が配置される位置を搬出側第1配置位置とし、前記搬出部の、前記第2搬送対象物が配置される位置を搬出側第2配置位置とし、前記搬入部の、前記第1搬送対象物が配置される位置を搬入側第1配置位置とし、前記搬入部の、前記第2搬送対象物が配置される位置を搬入側第2配置位置とし、上下方向から見たときに、前記搬出側第1配置位置の正規の位置に配置される前記第1搬送対象物の中心と前記搬出側第2配置位置の正規の位置に配置される前記第2搬送対象物の中心とを結ぶ線分を第1線分とし、上下方向から見たときに、前記搬入側第1配置位置の正規の位置に配置される前記第1搬送対象物の中心と前記搬入側第2配置位置の正規の位置に配置される前記第2搬送対象物の中心とを結ぶ線分を第2線分とすると、
前記搬出側補正値には、前記第1線分の中点の、水平方向における設計上の位置からのずれ量と、上下方向から見たときの前記第1線分の、設計上の位置からの傾きとが含まれ、
前記搬入側補正値には、前記第2線分の中点の、水平方向における設計上の位置からのずれ量と、上下方向から見たときの前記第2線分の、設計上の位置からの傾きとが含まれていることを特徴とする請求項4記載の産業用ロボット。
【請求項6】
搬送対象物が搭載されるハンドと、前記ハンドが連結されるアームと、前記アームが回動可能に連結される本体部と、水平方向への直線的な移動が可能となるように前記本体部を保持する本体保持部と、前記本体保持部に対して前記本体部を移動させる水平移動機構と、上下方向を回動の軸方向として前記本体部に対して前記アームを回動させるとともに一定方向を向いた状態の前記ハンドを前記本体部に対して水平方向に直線的に移動させるハンド駆動機構とを備え、前記搬送対象物が配置可能な搬出部から前記搬送対象物が配置可能な搬入部に前記搬送対象物を搬送し、
前記本体保持部に対する前記本体部の移動方向を第1方向とし、前記第1方向と上下方向とに直交する方向を第2方向とすると、
前記ハンドは、設計上、前記搬出部および前記搬入部のいずれか一方に対して前記第1方向に直線的に移動するとともに、前記搬出部および前記搬入部のいずれか他方に対して前記第2方向に直線的に移動する産業用ロボットの制御方法であって、
前記搬出部において正規の位置に配置される前記搬送対象物の、設計上の位置からのずれに基づいて前記ハンドの位置および向きを補正するための搬出側補正値と、前記搬入部において正規の位置に配置される前記搬送対象物の、設計上の位置からのずれに基づいて前記ハンドの位置および向きを補正するための搬入側補正値とが予め記憶され、
前記搬出部および前記搬入部のいずれか一方では、前記ハンドの位置および向きを補正せず、
前記搬出部および前記搬入部のいずれか他方では、前記搬出側補正値および前記搬入側補正値に基づいて前記ハンドの位置および向きを補正することを特徴とする産業用ロボットの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、半導体ウエハ等の搬送対象物を搬送する産業用ロボットに関する。また、本発明は、かかる産業用ロボットを制御するための産業用ロボットの制御方法に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
従来、半導体ウエハを搬送するための産業用ロボットが知られている(たとえば、特許文献1参照)。特許文献1に記載の産業用ロボットは、半導体ウエハが搭載されるハンドと、ハンドが先端側に回動可能に連結されるアームと、アームの基端側が回動可能に連結される本体部と、本体部を水平方向に直線的に移動させるX軸テーブルとを備えている。この産業用ロボットは、ロードポートに設置されるウエハ収納容器とウエハ処理装置との間で半導体ウエハを1枚ずつ搬送する。
【0003】
特許文献1に記載の産業用ロボットが組み込まれる半導体製造システムでは、たとえば、ウエハ収納容器やウエハ処理装置を構成する部品のばらつき等の影響で、産業用ロボットによってウエハ収納容器やウエハ処理装置に搬入されて正規の位置に配置される半導体ウエハの位置が設計上の位置からずれることがある。そのため、特許文献1に記載の産業用ロボットが組み込まれる半導体製造システムでは、センサ治具と遮光治具とを用いて、ウエハ収納容器やウエハ処理装置においてハンドの位置および向きを補正するための補正値を予め算出し、半導体ウエハを搬送するときにこの補正値に基づいてハンドの位置および向きを補正している。
【先行技術文献】
【特許文献】
【0004】
国際公開第2009/145082号
【発明の概要】
【発明が解決しようとする課題】
【0005】
本願発明者は、特許文献1に記載の産業用ロボットのように、半導体ウエハ等の搬送対象物を所定の搬出部から所定の搬入部に搬送する産業用ロボットを開発している。この産業用ロボットが組み込まれる製造システムでは、特許文献1に記載の産業用ロボットが組み込まれる半導体製造システムと同様に、搬出部においてハンドの位置および向きを補正するための補正値を予め算出し、搬出部から搬送対象物を搬出するときにこの補正値に基づいてハンドの位置および向きを補正するとともに、搬入部においてハンドの位置および向きを補正するための補正値を予め算出し、搬入部に搬送対象物を搬入するときにこの補正値に基づいてハンドの位置および向きを補正することが好ましい。
【0006】
しかしながら、たとえば、搬出部または搬入部の設置位置や、搬出部または搬入部の構造や、産業用ロボットの構造等に起因する機械的な制約によって、搬出部および搬入部のいずれか一方において産業用ロボットのハンドの位置および向きを適切に補正できない場合も生じうる。この場合には、搬出部から搬入部に搬送対象物を適切に搬送することが困難になるおそれがある。
【0007】
そこで、本発明の課題は、搬出部から搬入部に搬送対象物を搬送する産業用ロボットにおいて、機械的な制約によって搬出部および搬入部のいずれか一方で産業用ロボットのハンドの位置および向きを適切に補正することができなくても、搬出部から搬入部に搬送対象物を適切に搬送することが可能な産業用ロボットを提供することにある。また、本発明の課題は、搬出部から搬入部に搬送対象物を搬送する産業用ロボットにおいて、機械的な制約によって搬出部および搬入部のいずれか一方で産業用ロボットのハンドの位置および向きを適切に補正することができなくても、搬出部から搬入部に搬送対象物を適切に搬送することが可能となる産業用ロボットの制御方法を提供することにある。
【課題を解決するための手段】
【0008】
上記の課題を解決するため、本発明の産業用ロボットは、搬送対象物が配置可能な搬出部から搬送対象物が配置可能な搬入部に搬送対象物を搬送する産業用ロボットであって、搬送対象物が搭載されるハンドと、ハンドが連結されるアームと、アームが回動可能に連結される本体部と、水平方向への直線的な移動が可能となるように本体部を保持する本体保持部と、本体保持部に対して本体部を移動させる水平移動機構と、上下方向を回動の軸方向として本体部に対してアームを回動させるとともに一定方向を向いた状態のハンドを本体部に対して水平方向に直線的に移動させるハンド駆動機構と、産業用ロボットを制御するための制御部とを備え、制御部には、搬出部において正規の位置に配置される搬送対象物の、設計上の位置からのずれに基づいてハンドの位置および向きを補正するための搬出側補正値と、搬入部において正規の位置に配置される搬送対象物の、設計上の位置からのずれに基づいてハンドの位置および向きを補正するための搬入側補正値とが予め記憶され、本体保持部に対する本体部の移動方向を第1方向とし、第1方向と上下方向とに直交する方向を第2方向とすると、ハンドは、設計上、搬出部および搬入部のいずれか一方に対して第1方向に直線的に移動するとともに、搬出部および搬入部のいずれか他方に対して第2方向に直線的に移動し、制御部は、搬出部および搬入部のいずれか一方では、ハンドの位置および向きを補正せず、搬出部および搬入部のいずれか他方では、搬出側補正値および搬入側補正値に基づいてハンドの位置および向きを補正することを特徴とする。
【0009】
また、上記の課題を解決するため、本発明の産業用ロボットの制御方法は、搬送対象物が搭載されるハンドと、ハンドが連結されるアームと、アームが回動可能に連結される本体部と、水平方向への直線的な移動が可能となるように本体部を保持する本体保持部と、本体保持部に対して本体部を移動させる水平移動機構と、上下方向を回動の軸方向として本体部に対してアームを回動させるとともに一定方向を向いた状態のハンドを本体部に対して水平方向に直線的に移動させるハンド駆動機構とを備え、搬送対象物が配置可能な搬出部から搬送対象物が配置可能な搬入部に搬送対象物を搬送し、本体保持部に対する本体部の移動方向を第1方向とし、第1方向と上下方向とに直交する方向を第2方向とすると、ハンドは、設計上、搬出部および搬入部のいずれか一方に対して第1方向に直線的に移動するとともに、搬出部および搬入部のいずれか他方に対して第2方向に直線的に移動する産業用ロボットの制御方法であって、搬出部において正規の位置に配置される搬送対象物の、設計上の位置からのずれに基づいてハンドの位置および向きを補正するための搬出側補正値と、搬入部において正規の位置に配置される搬送対象物の、設計上の位置からのずれに基づいてハンドの位置および向きを補正するための搬入側補正値とが予め記憶され、搬出部および搬入部のいずれか一方では、ハンドの位置および向きを補正せず、搬出部および搬入部のいずれか他方では、搬出側補正値および搬入側補正値に基づいてハンドの位置および向きを補正することを特徴とする。
【0010】
本発明では、搬出部および搬入部のいずれか一方においてハンドの位置および向きを補正せずに、搬出部および搬入部のいずれか他方において搬出側補正値および搬入側補正値に基づいてハンドの位置および向きを補正している。そのため、本発明では、たとえば、搬出部または搬入部の設置位置や、搬出部または搬入部の構造や、産業用ロボットの構造等に起因する機械的な制約によって、搬出部および搬入部のいずれか一方においてハンドの位置および向きを適切に補正することができなくても、搬出部および搬入部のいずれか他方においてハンドの位置および向きを適切に補正することが可能になる。したがって、本発明では、機械的な制約によって搬出部および搬入部のいずれか一方においてハンドの位置および向きを適切に補正することができなくても、搬出部から搬入部に搬送対象物を適切に搬送することが可能になる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
テーブルタップ
21日前
三洋化成工業株式会社
軟磁性材料
11日前
キヤノン株式会社
電子機器
21日前
株式会社ヨコオ
同軸コネクタ
17日前
古河電池株式会社
制御弁式鉛蓄電池
17日前
株式会社GSユアサ
蓄電装置
21日前
株式会社GSユアサ
蓄電装置
21日前
個人
六角形パネル展開アレーアンテナ
21日前
日本特殊陶業株式会社
保持装置
11日前
株式会社ユーシン
スイッチ装置
21日前
株式会社ヨコオ
ソケット
4日前
株式会社ユーシン
スイッチ装置
21日前
株式会社半導体エネルギー研究所
電池
10日前
日新電機株式会社
変圧器
5日前
TDK株式会社
コイル部品
17日前
ローム株式会社
半導体装置
21日前
住友電装株式会社
コネクタ
17日前
三洲電線株式会社
撚線導体
11日前
大和電器株式会社
コンセント
17日前
トヨタバッテリー株式会社
二次電池
4日前
株式会社デンソー
半導体装置
21日前
オムロン株式会社
リード線整列治具
21日前
富士電機株式会社
半導体装置
21日前
日産自動車株式会社
電子機器
24日前
三洋化成工業株式会社
リチウムイオン電池
11日前
太陽誘電株式会社
コイル部品
21日前
株式会社デンソー
半導体装置
21日前
ニチコン株式会社
コンデンサ
17日前
株式会社村田製作所
コイル部品
3日前
個人
ユニバーサルデザインコンセントプラグ
21日前
日本無線株式会社
モノポールアンテナ
21日前
株式会社村田製作所
電池パック
11日前
ローム株式会社
半導体発光装置
17日前
トヨタ自動車株式会社
非水系二次電池
24日前
マクセル株式会社
電気化学素子
21日前
河村電器産業株式会社
接続装置
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ