TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025013322
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2024113361
出願日
2024-07-16
発明の名称
一次アームおよび二次工具の組み合わせシステム
出願人
マクドナルド・デトワイラー・アンド・アソシエイツ・インコーポレイテッド
代理人
個人
,
個人
,
個人
主分類
B64G
4/00 20060101AFI20250117BHJP(航空機;飛行;宇宙工学)
要約
【課題】ロボット操縦のためのシステムおよび方法が提供されている。
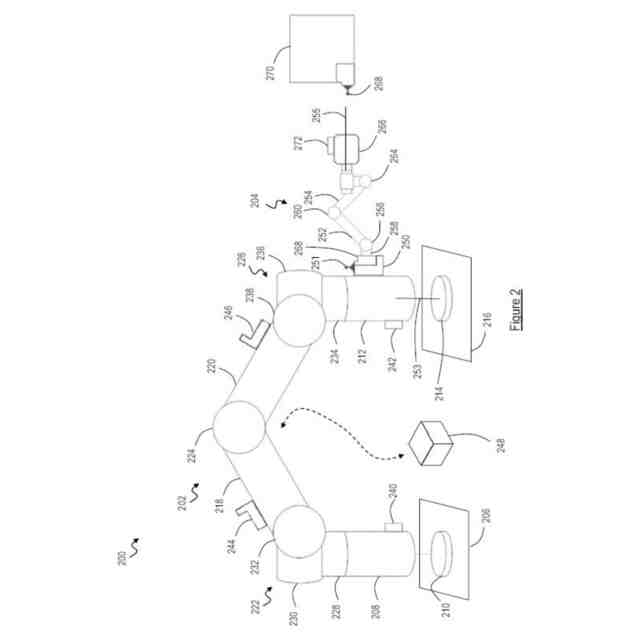
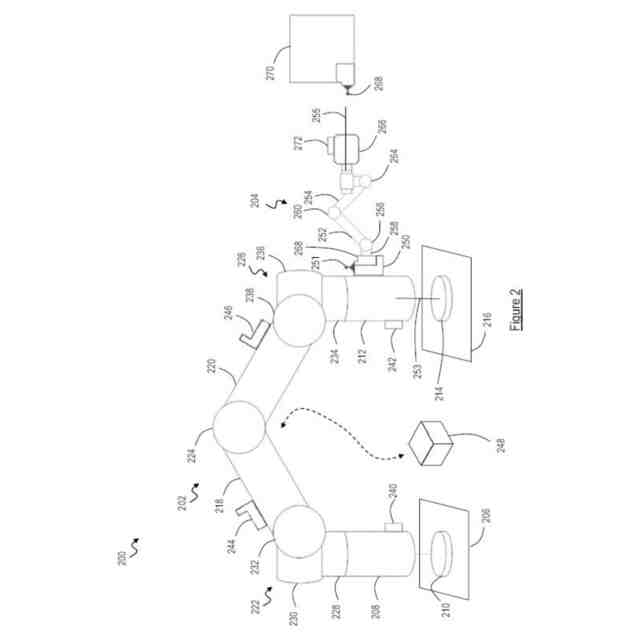
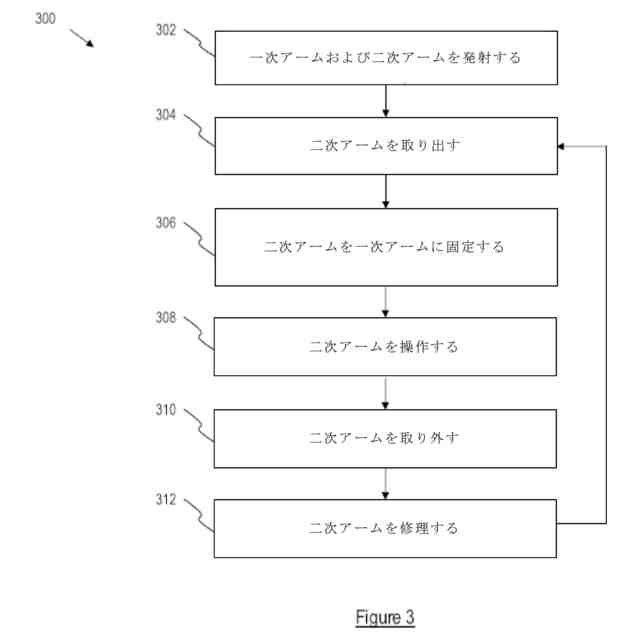
【解決手段】システムは、2つのアームリンクを備えた一次アームと、二次工具と、二次工具を一次アームに取り付けるためのアタッチメントと、二次工具を操作するための、一次工具のコントローラと、を含んでいる。方法は、保管場所から二次アームを取り出すステップと、二次アームを一次アームに固定するステップと、一次アームのコントローラを用いて、二次アームを操作するステップと、を含んでいる。
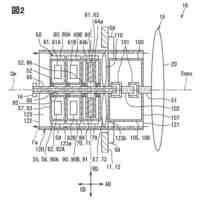
【選択図】図2
特許請求の範囲
【請求項1】
ロボット操縦のためのシステムであって、
2つのアームリンクを備えた一次アームと、
二次工具と、
該二次工具を前記一次アームに取り付けるためのアタッチメントと、
前記二次工具を操作するための、前記一次アームのコントローラと、
を備えている、システム。
続きを表示(約 1,000 文字)
【請求項2】
前記アタッチメントは、前記一次アームの手首に取りつけられている、請求項1に記載のシステム。
【請求項3】
前記二次工具は二次アームである、請求項2に記載のシステム。
【請求項4】
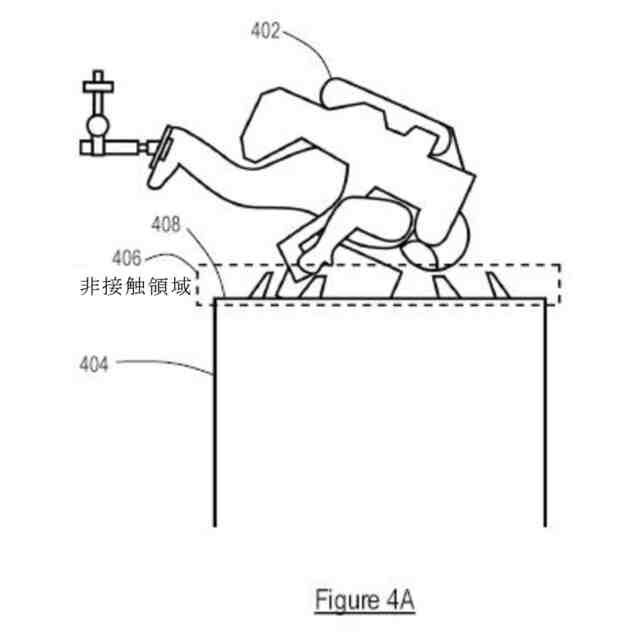
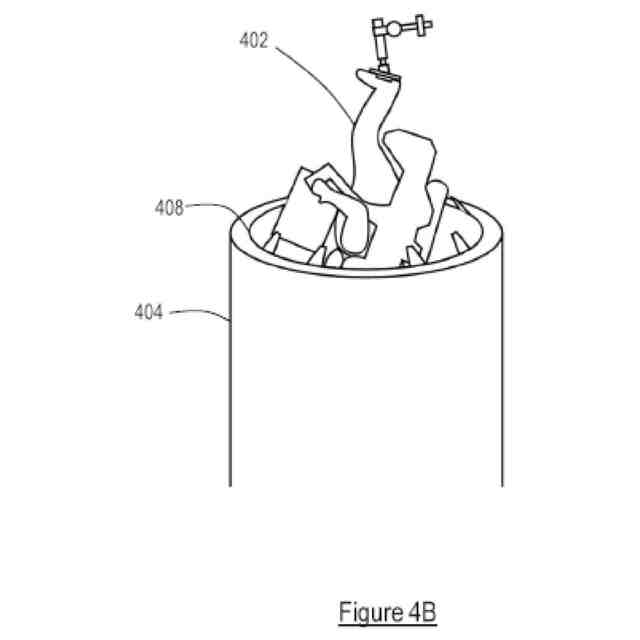
前記一次アームは、第1の把捉固定具から別の把捉固定具へとプラットフォーム上を回転しながら歩行するように操作可能である、請求項3に記載のシステム。
【請求項5】
前記一次アームは、
該一次アームを第1の把捉固定具に接続するように操作可能な第1のエンドエフェクタと、
前記一次アームを第2の把捉固定具に接続するように操作可能な第2のエンドエフェクタと、
を含み、
前記一次アームは、前記第1のエンドエフェクタおよび前記第2のエンドエフェクタを、プラットフォーム上の異なった位置に対して操縦する、請求項4に記載のシステム。
【請求項6】
前記一次アームは、
第1のブームおよび第2のブームと、
前記第1のエンドエフェクタを前記第1のブームに接続した第1のジョイントであって、3自由度の手首クラスタを備えた第1のジョイントと、
前記第1のブームを前記第2のブームに接続した第2のジョイントであって、3自由度の手首クラスタを備えた第2のジョイントと、
前記第2のブームを前記第2のエンドエフェクタに接続した第3のジョイントと、
を備えている、請求項5に記載のシステム。
【請求項7】
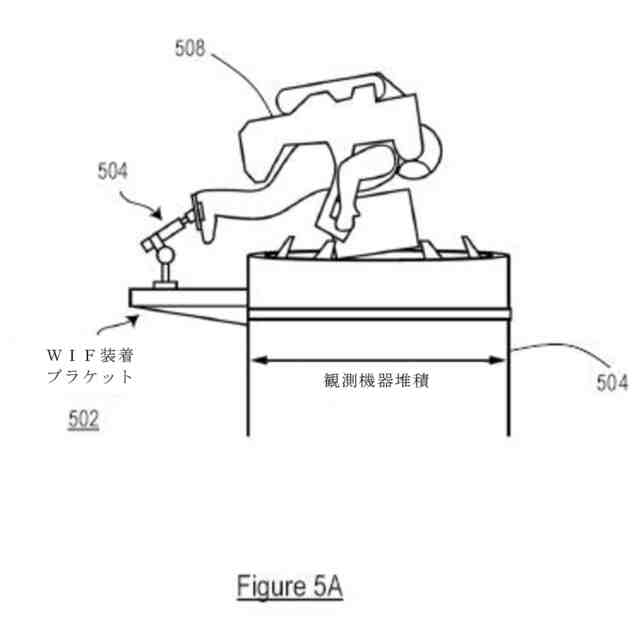
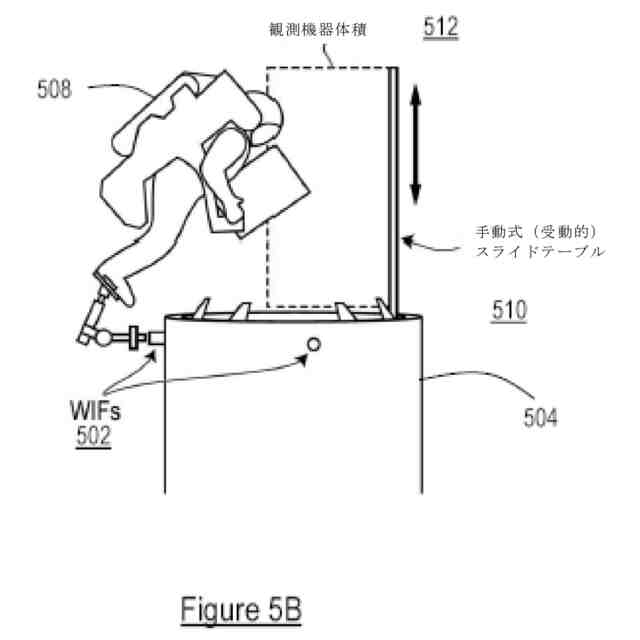
前記第1のブームおよび前記第2のブームは、第1および第2の軌道上交換ユニットインターフェイスを含み、該第1および第2の軌道上交換ユニットインターフェイスは、相互作用する対象物に機械的物品、電力、およびデータのいずれか1つ以上を提供する、請求項6に記載のシステム。
【請求項8】
前記一次アームの前記コントローラは、前記一次アームおよび前記二次工具の両方を備えた、より大きく且つより複雑な構造を補償するように操作可能である、請求項1に記載のシステム。
【請求項9】
前記二次アームは7自由度を有し、前記一次アームは7自由度を有する、請求項2に記載のシステム。
【請求項10】
前記二次アームは、観測機器と相互作用するための把捉固定具を備え、該把捉固定具は、機械的、電力的、およびデータ的伝達のうちのいずれか1つ以上を前記観測機器に伝達する、請求項3に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
ここに開示された実施形態はロボット操縦に関し、特に、一次アームおよび二次工具の組み合わせシステムのためのシステム、方法、およびデバイスに関する。
続きを表示(約 990 文字)
【背景技術】
【0002】
従来、制約のある作業場所にアクセスすることは、困難である場合がある。特に、閉鎖された空洞内等の、傾斜したインターフェイスが存在する場所、オリジナルのアームがアクセスすることが不可能となり得る場所である。従来のシステムにより多くの工具を単に加えることは、ロボットの制御を複雑にする。
【0003】
ロボット制御の実行中には、複数アームの制御のための逆運動学の演算、両方のアームを介したデータ転送構造、多様な制御出力を容易にする制御アルゴリズム/コントローラの構成変更、サブシステムの出力割り当て、安全な操作手順、および結合したアームの危険制御などを含む、いくつかの課題が存在している。
【先行技術文献】
【特許文献】
【0004】
カナダ特許第3,106,753号明細書
国際公開第2023/108293号パンフレット
【発明の概要】
【発明が解決しようとする課題】
【0005】
したがって、ロボット操縦のための改良されたシステムおよび方法が、必要とされている。
【課題を解決するための手段】
【0006】
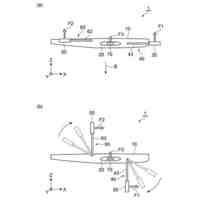
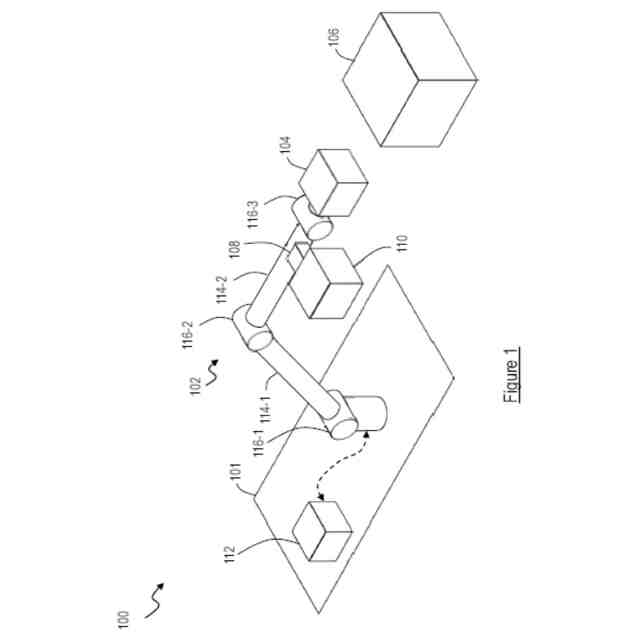
ロボット操縦のためのシステムが提供されている。システムは、2つのアームリンクを備えた一次アームと、二次工具と、二次工具を一次アームに取り付けるためのアタッチメントと、二次工具を操作するための、一次工具のコントローラと、を含んでいる。
【0007】
アタッチメントは、一次アームの手首に取りつけられ得る。
【0008】
二次工具は二次アームであり得る。
【0009】
一次アームは、第1の把捉固定具から別の把捉固定具へとプラットフォーム上を回転しながら歩行するように操作可能であり得る。
【0010】
一次アームは、一次アームを第1の把捉固定具に接続するように操作可能な第1のエンドエフェクタと、一次アームを第2の把捉固定具に接続するように操作可能な第2のエンドエフェクタと、を含み得る。一次アームは、第1のエンドエフェクタおよび第2のエンドエフェクタを、プラットフォーム上の異なった位置に対して操縦し得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
飛行体
10か月前
個人
ドローンシステム
10日前
株式会社三圓
浮上装置
4か月前
個人
空港用貨物搬送車
8か月前
個人
飛行艇
6か月前
個人
ドローンの計測操作方法2
4か月前
個人
ドローンの計測操作方法3
4か月前
キヤノン電子株式会社
磁気トルカ
5か月前
個人
自由落下運航システム
10か月前
個人
マルチコプター型電気飛行機
9か月前
個人
人工衛星推進材循環エンジン
9か月前
個人
ドローン消音装置
2か月前
個人
ドローンを自動離着陸する方法
14日前
個人
空中移動システム
1か月前
合同会社アドエア
飛行体落下補助装置
12か月前
株式会社セネック
ドローンポート
7か月前
株式会社セネック
ドローンポート
7か月前
株式会社中北製作所
羽ばたき装置
9か月前
株式会社SUBARU
電動航空機
8か月前
株式会社中北製作所
羽ばたき装置
8か月前
合同会社アドエア
飛行体の落下補助装置
1か月前
株式会社SUBARU
移動体
1か月前
株式会社SUBARU
回転翼航空機
8か月前
個人
垂直離着陸機用ガスタービンエンジン
10日前
全日本空輸株式会社
ドーリシステム
3か月前
国立大学法人九州大学
飛行体
10か月前
SkyDeer株式会社
衛星制御方法
10か月前
HDサービス合同会社
カメラ装着装置
2か月前
本田技研工業株式会社
移動体
3か月前
本田技研工業株式会社
航空機
3か月前
本田技研工業株式会社
航空機
3か月前
株式会社デンソー
推進装置
6か月前
本田技研工業株式会社
移動体
5か月前
本田技研工業株式会社
移動体
5か月前
株式会社日立製作所
推進装置
2か月前
株式会社小糸製作所
航空機用灯具
5か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ