TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025013185
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2024092622
出願日
2024-06-06
発明の名称
装置、装置の制御方法、物品の製造方法、装置の組立方法、ロボット、自動車、プログラム、及び記録媒体
出願人
キヤノン株式会社
代理人
弁理士法人近島国際特許事務所
主分類
B25J
17/00 20060101AFI20250117BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】高精度な動作が可能なロボットを提供する。
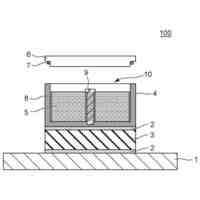
【解決手段】装置は、2つの部位を有する支持体と、ユニットと、を備える。ユニットは、減速機、減速機に設けられたモータ、及び減速機に設けられた軸受を有し、減速機、モータ及び軸受が互いに一体的に組み付けられ、2つの部位に装着されている。
【選択図】図1
特許請求の範囲
【請求項1】
2つの部位を有する支持体と、
減速機、前記減速機に設けられたモータ、及び前記減速機に設けられた軸受を有し、前記減速機、前記モータ及び前記軸受が互いに一体的に組み付けられ、前記2つの部位に装着された、ユニットと、を備える、
ことを特徴とする装置。
続きを表示(約 740 文字)
【請求項2】
前記2つの部位は、U字形状部の一部であり、前記支持体は前記U字形状部を有している、
ことを特徴とする請求項1に記載の装置。
【請求項3】
前記ユニットは、前記支持体から一体的に着脱可能に前記支持体に装着されている、
ことを特徴とする請求項1に記載の装置。
【請求項4】
前記ユニットは、前記モータと前記減速機とを位置決めする第1部材を有する、
ことを特徴とする請求項2に記載の装置。
【請求項5】
前記第1部材は、前記モータのステータ及びロータを収容するハウジングを含む、
ことを特徴とする請求項4に記載の装置。
【請求項6】
前記ユニットは、前記減速機の入力側に設けられ、前記第1部材に支持された第1オイルシールを有する、
ことを特徴とする請求項4に記載の装置。
【請求項7】
前記第1部材は、前記U字形状部に支持される、
ことを特徴とする請求項4に記載の装置。
【請求項8】
前記軸受を前記ユニットに一体化させ、前記ユニットにおける前記軸受の位置決めを行うための第2部材を備えている、
ことを特徴とする請求項1に記載の装置。
【請求項9】
前記軸受の内輪及び外輪のうちの一方が前記第2部材に支持され、他方が前記支持体に支持される、
ことを特徴とする請求項8に記載の装置。
【請求項10】
前記軸受の前記内輪及び前記外輪のうちの他方が連結部材を介して前記支持体に固定される、
ことを特徴とする請求項9に記載の装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、装置の技術に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
装置として、例えばロボットの関節には、特許文献1に示すように、モータ、減速機及び軸受などの複数の機械的な部品が配置されている。
【先行技術文献】
【特許文献】
【0003】
特開2016-196054号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
装置には、再現性の高い高精度な動作が要求されてきている。このことから、装置に配置される機械的な部品には、互いに高精度に組み付けられることが要求される。
【0005】
本開示は、装置が実行する動作の精度を向上させることにある。
【課題を解決するための手段】
【0006】
本開示の第1態様は、2つの部位を有する支持体と、減速機、前記減速機に設けられたモータ、及び前記減速機に設けられた軸受を有し、前記減速機、前記モータ及び前記軸受が互いに一体的に組み付けられ、前記2つの部位に装着された、ユニットと、を備える、ことを特徴とする装置である。
【0007】
本開示の第2態様は、2つの部位を有する支持体を備える装置の組立方法であって、減速機とモータとが位置決めされるように前記減速機と前記モータとを第1部材に固定し、前記減速機と軸受とが位置決めされるように前記減速機と前記軸受とを第2部材に固定し、前記第1部材及び前記軸受を前記支持体の前記2つの部位に支持させる、ことを特徴とする装置の組立方法である。
【発明の効果】
【0008】
本開示によれば、装置が実行する動作の精度を向上させることが可能となる。
【図面の簡単な説明】
【0009】
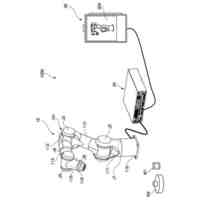
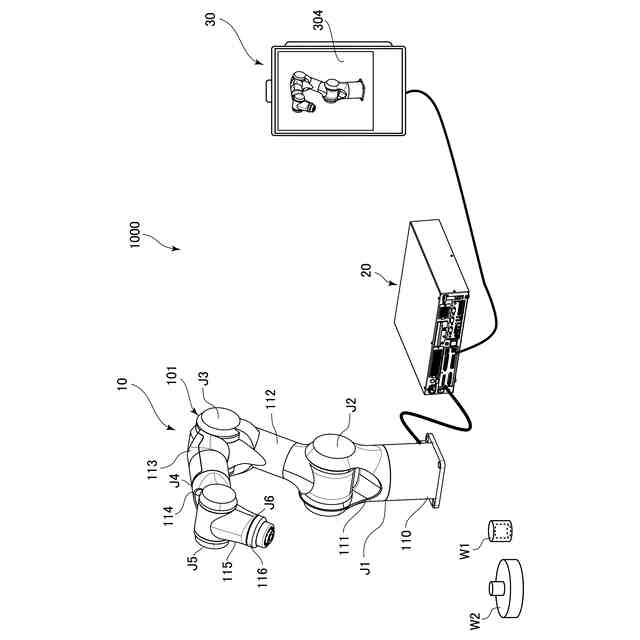
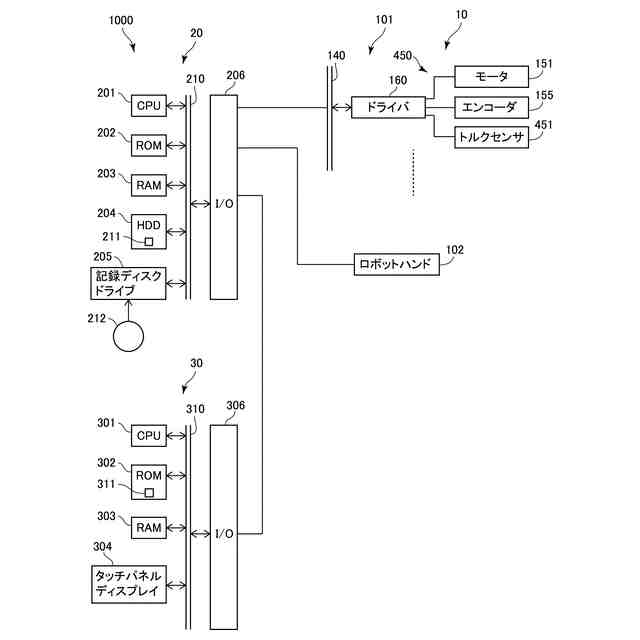
第1実施形態に係るロボットシステムの構成を示す説明図である。
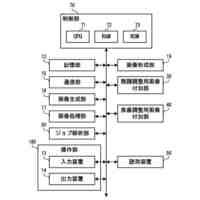
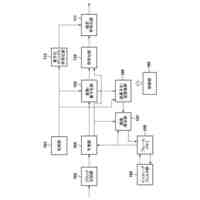
第1実施形態に係るロボットシステムの制御系を示すブロック図である。
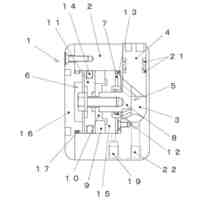
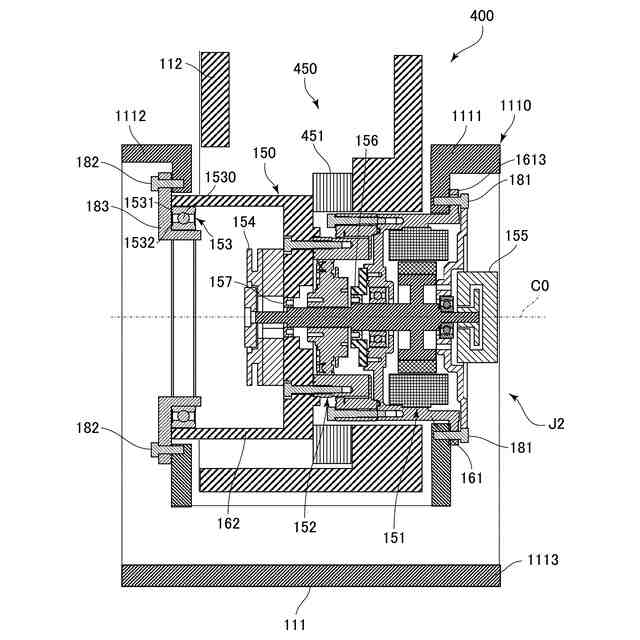
第1実施形態に係る関節構造の断面図である。
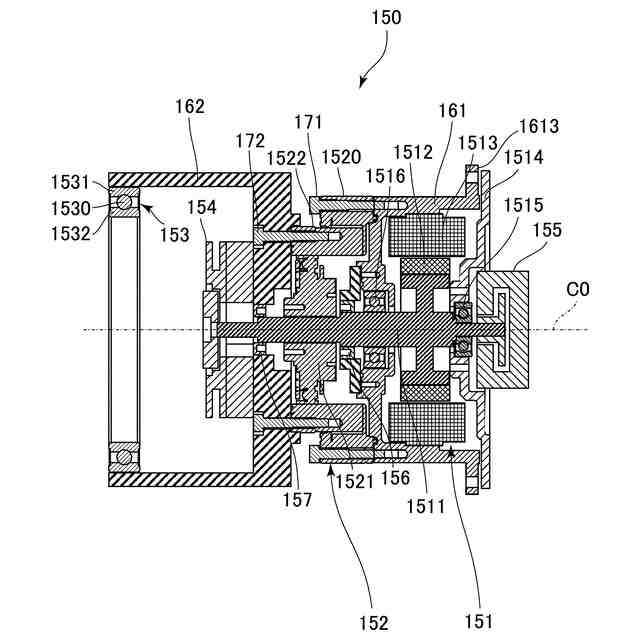
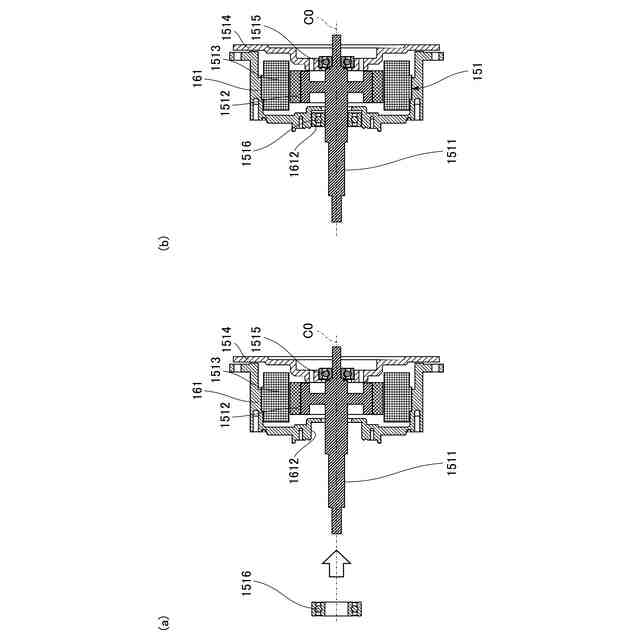
第1実施形態に係る駆動ユニットの断面図である。
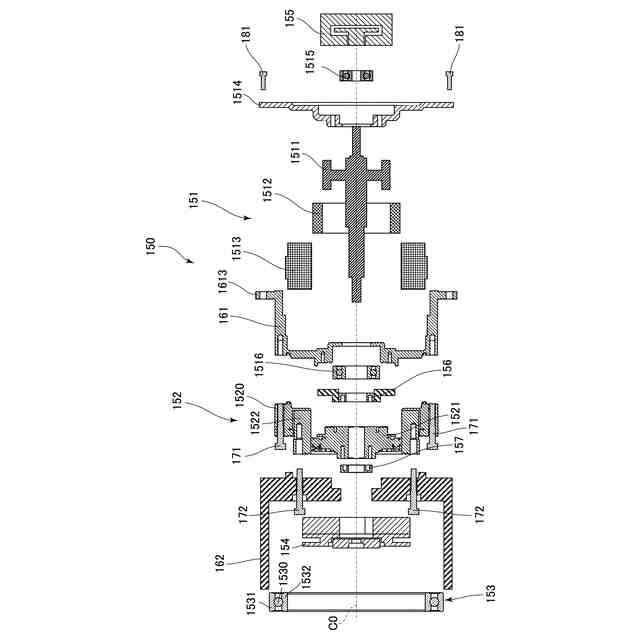
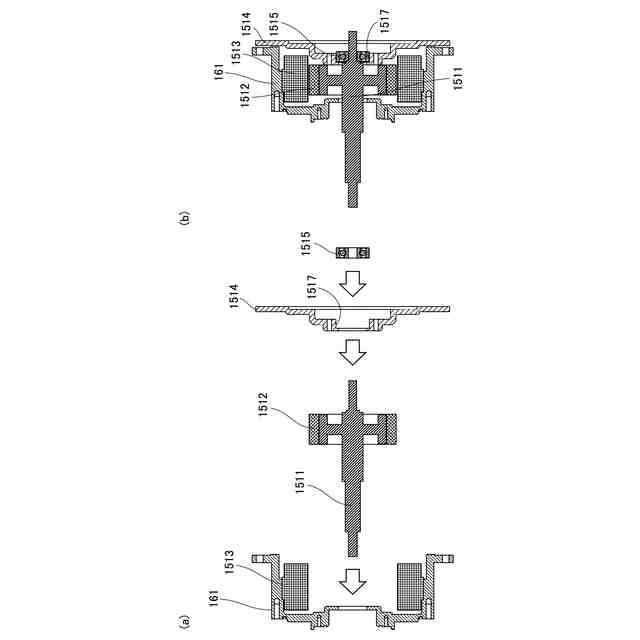
第1実施形態に係る駆動ユニットの分解断面図である。
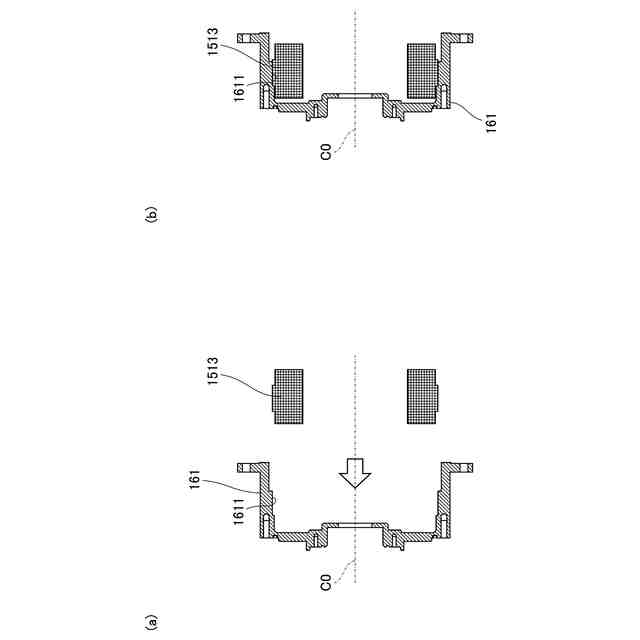
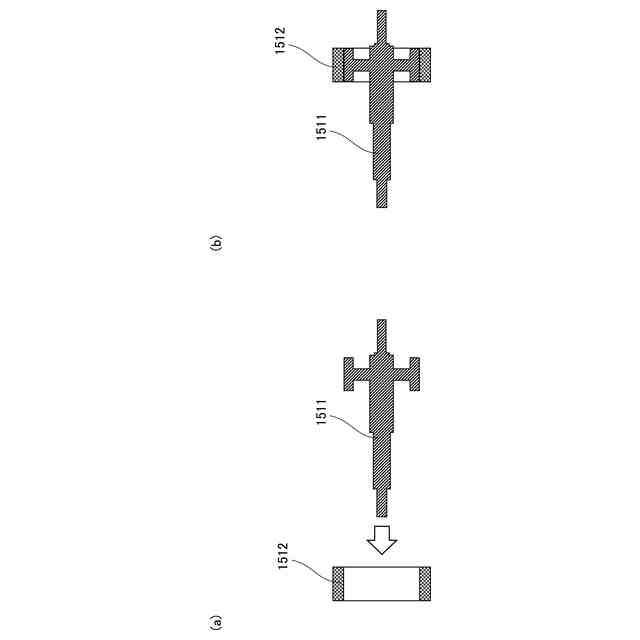
(a)及び(b)は第1実施形態の駆動ユニットの組立方法の説明図である。
(a)及び(b)は第1実施形態の駆動ユニットの組立方法の説明図である。
(a)及び(b)は第1実施形態の駆動ユニットの組立方法の説明図である。
(a)及び(b)は第1実施形態の駆動ユニットの組立方法の説明図である。
(a)及び(b)は第1実施形態の駆動ユニットの組立方法の説明図である。
(a)及び(b)は第1実施形態の駆動ユニットの組立方法の説明図である。
(a)及び(b)は第1実施形態の駆動ユニットの組立方法の説明図である。
(a)及び(b)は第1実施形態の駆動ユニットの組立方法の説明図である。
(a)及び(b)は第1実施形態の駆動ユニットの組立方法の説明図である。
(a)及び(b)は第1実施形態の駆動ユニットの組立方法の説明図である。
(a)及び(b)は第1実施形態の駆動ユニットの組立方法の説明図である。
第1実施形態に係るロボットの関節の組立方法の説明図である。
(a)は第1実施形態に係るリンクの側面図である。(b)は第1実施形態に係る駆動ユニットの側面図である。
(a)は第1実施形態に係るリンクの斜視図である。(b)は第1実施形態に係るリンクの側面図である。(c)は第1実施形態に係るリンクの断面図である。(d)は第1実施形態に係るリンクの製造方法の説明図である。
変形例1に係る関節の組立方法の説明図である。
変形例2に係る関節構造の説明図である。
変形例3に係る関節構造の説明図である。
変形例4に係る関節構造の説明図である。
(a)は変形例5に係るリンクの側面図である。(b)は変形例5に係るリンクの断面図である。(c)は変形例5に係るリンクの製造方法の説明図である。
変形例7に係るリンクの断面図である。
比較例の関節構造の説明図である。
第2実施形態に係る自動車の駆動構造の断面図である。
第2実施形態に係る自動車の駆動構造の組立方法の説明図である。
第3実施形態に係る自動車の駆動構造の断面図である。
第3実施形態に係る自動車の駆動構造の組立方法の説明図である。
【発明を実施するための形態】
【0010】
以下、本開示の例示的な実施形態について、図面を参照しながら詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
インク収容容器
3日前
キヤノン株式会社
撮像素子、制御方法およびコンピュータプログラム
3日前
キヤノン株式会社
半導体装置、表示装置、光電変換装置、および電子機器
3日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
動吸振器、システム、リソグラフィ装置、及び物品の製造方法
3日前
キヤノン株式会社
記録装置、制御方法
3日前
キヤノン株式会社
通信装置、制御方法及びプログラム
3日前
キヤノン株式会社
表示制御装置、撮像装置、及び移動装置
3日前
キヤノン株式会社
半導体装置および半導体装置の製造方法
3日前
キヤノン株式会社
システム、方法、プログラム、記憶媒体
3日前
キヤノン株式会社
情報処理装置、およびその制御方法とプログラム
3日前
キヤノン株式会社
装置、装置の制御方法、物品の製造方法、装置の組立方法、ロボット、自動車、プログラム、及び記録媒体
3日前
キヤノン株式会社
画像符号化装置、画像符号化方法、画像復号装置、画像復号方法
3日前
キヤノン株式会社
第1のサーバシステムとシステム、及びそれらの制御方法、並びにプログラム
3日前
キヤノン株式会社
基板処理装置、基板処理装置の制御方法、物品製造方法、および、プログラム
3日前
キヤノン株式会社
情報処理方法、情報処理装置、生産システム、物品の製造方法、プログラム及び記録媒体。
3日前
株式会社エビス
連結具
1か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
打撃工具
2か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社ダイヘン
制御装置
2か月前
株式会社エビス
携帯付属物取付具
2か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社マキタ
電動ハンマ
3か月前
川崎重工業株式会社
ロボット
1か月前
SMC株式会社
グリッパ
3か月前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
ハンマドリル
1か月前
CKD株式会社
吸着型搬送装置
4日前
学校法人立命館
ロボットハンド
2か月前
株式会社近藤製作所
産業用ロボットチャック
3か月前
株式会社安川電機
ロボット
7日前
株式会社安川電機
ロボット
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ