TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025013001
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023116245
出願日
2023-07-14
発明の名称
設計最適化装置、設計最適化方法、プログラムおよび記録媒体
出願人
国立大学法人東海国立大学機構
,
国立研究開発法人理化学研究所
代理人
個人
主分類
G05B
19/418 20060101AFI20250117BHJP(制御;調整)
要約
【課題】暗黙知や試行錯誤に頼ることなく、広大かつ複雑な製造パラメータ空間の中から製造物の最適化に寄与するパラメータを選定し、装置設計を最適化する。
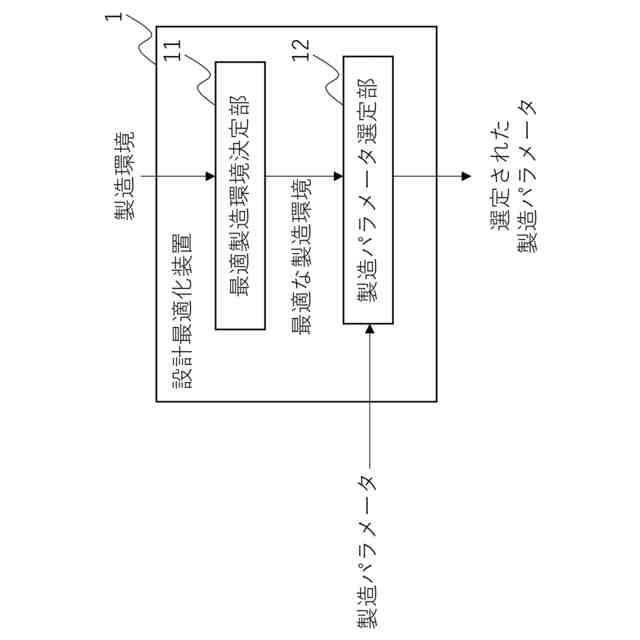
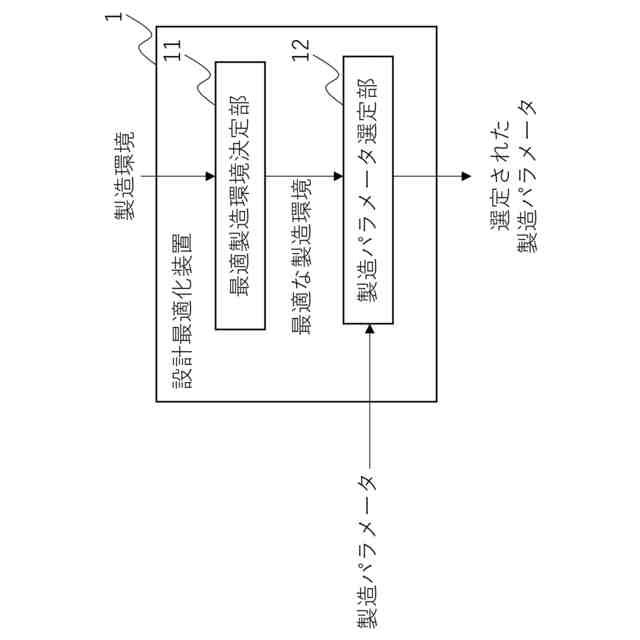
【解決手段】設計最適化装置1は、製造装置によって製造される製造物の最適指標を表す目的変数が最適化されるときの製造装置内の最適な製造環境を決定する最適製造環境決定部11と、製造装置に関する所定の複数の製造パラメータの中から、最適な製造環境を実現するのに寄与する1つ以上の製造パラメータを選定する製造パラメータ選定部12と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
製造装置によって製造される製造物の最適指標を表す目的変数が最適化されるときの前記製造装置内の最適な製造環境を決定する最適製造環境決定部と、
前記製造装置に関する所定の複数の製造パラメータの中から、前記最適な製造環境を実現するのに寄与する1つ以上の製造パラメータを選定する製造パラメータ選定部と、
を備えることを特徴とする設計最適化装置。
続きを表示(約 1,200 文字)
【請求項2】
前記製造パラメータ選定部によって選定された製造パラメータを最適化する製造パラメータ最適化部を備えることを特徴とする請求項1に記載の設計最適化装置。
【請求項3】
前記最適製造環境決定部は、前記製造装置内の製造環境と、前記製造物の目的変数と、を教師データとして機械学習を実行することを特徴とする請求項1または2に記載の設計最適化装置。
【請求項4】
前記最適製造環境決定部は、教師データを作成するために、前記装置内の製造環境を与えたときに実現される前記製造物の目的変数を求めるシミュレーションを実行することを特徴とする請求項3に記載の設計最適化装置。
【請求項5】
前記製造パラメータ選定部は、前記製造装置に関する所定の複数の製造パラメータを説明変数として、前記製造物の目的変数に対してパラメータ分析を行うことを特徴とする請求項1または2に記載の設計最適化装置。
【請求項6】
前記パラメータ分析は重回帰分析であることを特徴とする請求項5に記載の設計最適化装置。
【請求項7】
前記製造パラメータ最適化部は、前記製造パラメータ選定部によって選定された製造パラメータと、前記製造装置内の製造環境と、を教師データとして機械学習を実行することを特徴とする請求項2に記載の設計最適化装置。
【請求項8】
製造装置によって製造される製造物の最適指標を表す目的変数が最適化されるときの前記製造装置内の最適な製造環境を決定する最適製造環境決定ステップと、
前記製造装置に関する所定の複数の製造パラメータの中から、前記最適な製造環境を実現するのに寄与する1つ以上の製造パラメータを選定する製造パラメータ選定ステップと、
を含むことを特徴とする設計最適化方法。
【請求項9】
製造装置によって製造される製造物の最適指標を表す目的変数が最適化されるときの前記製造装置内の最適な製造環境を決定する最適製造環境決定ステップと、
前記製造装置に関する所定の複数の製造パラメータの中から、前記最適な製造環境を実現するのに寄与する1つ以上の製造パラメータを選定する製造パラメータ選定ステップと、を含む設計最適化方法をコンピュータに実行させることを特徴とするプログラム。
【請求項10】
製造装置によって製造される製造物の最適指標を表す目的変数が最適化されるときの前記製造装置内の最適な製造環境を決定する最適製造環境決定ステップと、
前記製造装置に関する所定の複数の製造パラメータの中から、前記最適な製造環境を実現するのに寄与する1つ以上の製造パラメータを選定する製造パラメータ選定ステップと、を含むプログラムを記録した記録媒体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、設計最適化装置、設計最適化方法、プログラムおよび記録媒体に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
近年、コンピュータの計算性能の向上に伴い、数値シミュレーション技術や機械学習技術が急速に発達している。こうした技術は、製造装置のプロセス条件や、装置設計・製造に関わるパラメータの高速な最適化に応用されつつある(例えば、特許文献1~3参照)。
【先行技術文献】
【非特許文献】
【0003】
N. Dropka and M. Holena, “Optimization of magnetically driven directional solidification of silicon using artificial neural networks and Gaussian process models,” J Cryst Growth, vol. 471, pp. 53.61, Aug. 2017, doi: 10.1016/j.jcrysgro.2017.05.007.
X. Liu et al., “Data-Driven Optimization and Experimental Validation for the Lab-Scale Mono-Like Silicon Ingot Growth by Directional Solidification,” ACS Omega, vol. 7, no. 8, pp. 6665.6673, Mar. 2022, doi: 10.1021/acsomega.1c06018.
W. Yu et al., “Geometrical design of a crystal growth system guided by a machine learning algorithm,” CrystEngComm, vol. 23, no. 14, pp. 2695.2702, Apr. 2021, doi: 10.1039/d1ce00106j.
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特に材料製造プロセス技術には、依然として大きく2つの課題が存在する。1つ目は、製造プロセスを特徴付けるパラメータ(以下、「製造パラメータ」という)の空間が広大で複雑である点にある。素材の品質や製造効率などに寄与する製造パラメータには、ヒータ温度や部材の移動速度のように数値を変えて調整可能なものの他に、装置部材の位置や大きさといった装置設計に関わるもの(すなわち、装置を設置した後は数値を変えて調整できないもの)も存在する。さらに製造工程には素材ごとに様々なバリエーションが存在し、各工程を制御する製造パラメータ同士も複雑に作用し合うことから、これらを統一的に扱うことが難しい。2つ目の課題は、時間・費用面でのコストである。製造物の品質や製造効率を最適化するためには、製造プロセス開発で、製造物の素材の作製、作製した素材の評価、評価結果に応じた製造プロセス条件の検証、といったサイクルが繰り返し行われる。通常こうしたサイクルの成否は、設計者やオペレータの経験や熟練度などといった暗黙知に大きく依存する。しかし1つ目の課題で述べたように、製造プロセスを特徴付けるパラメータ空間は広大で複雑であることから、設計者の暗黙知や試行錯誤的な過程に頼る従来の手法は、時間・費用の面で多くのコストを必要とする。特許文献1~3に開示された技術は、こうした課題を十分解決できていない。
【0005】
本開示はこうした状況に鑑みてなされており、その目的は、暗黙知や試行錯誤に頼ることなく、広大かつ複雑な製造パラメータ空間の中から製造物の最適化に寄与するパラメータを選定し、装置設計を最適化することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある態様の設計最適化装置は、製造装置によって製造される製造物の最適指標を表す目的変数が最適化されるときの製造装置内の最適な製造環境を決定する最適製造環境決定部と、製造装置に関する所定の複数の製造パラメータの中から、最適な製造環境を実現するのに寄与する1つ以上の製造パラメータを選定する製造パラメータ選定部と、を備える。
【0007】
ある実施の形態では、設計最適化装置は、製造パラメータ選定部によって選定された製造パラメータを最適化する製造パラメータ最適化部を備えてもよい。
【0008】
ある実施の形態では、最適製造環境決定部は、製造装置内の製造環境と、製造物の目的変数と、を教師データとして機械学習を実行してもよい。
【0009】
ある実施の形態では、最適製造環境決定部は、教師データを作成するために、装置内の製造環境を与えたときに実現される製造物の目的変数を求めるシミュレーションを実行してもよい。
【0010】
ある実施の形態では、製造パラメータ選定部は、製造装置に関する所定の複数の製造パラメータを説明変数として、製造物の目的変数に対してパラメータ分析を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
方向検出器
2か月前
ugo株式会社
移動体
2か月前
個人
無人作業システム
6日前
村田機械株式会社
産業機械
20日前
株式会社ダイヘン
移動体
2か月前
株式会社ダイヘン
移動体
2か月前
神港テクノス株式会社
制御装置
2か月前
トヨタ自動車株式会社
自律移動体
2か月前
トヨタ自動車株式会社
自律移動体
20日前
コフロック株式会社
流量制御装置
今日
トヨタ自動車株式会社
搬送ロボット
3か月前
トヨタ自動車株式会社
配送システム
1か月前
株式会社クボタ
作業車
20日前
株式会社フジキン
流体制御装置
1か月前
株式会社明電舎
車両
20日前
アズビル株式会社
パラメータ調整装置
29日前
トヨタ自動車株式会社
ロボットシステム
28日前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
自律移動システム
2か月前
株式会社ダイフク
搬送設備
7日前
トヨタ自動車株式会社
ロボットシステム
20日前
トヨタ自動車株式会社
位置推定システム
2か月前
株式会社村田製作所
温度補償回路
6日前
株式会社FUJI
工作機械の操作システム
2か月前
株式会社栗本鐵工所
操作装置
3か月前
株式会社ダイフク
物品搬送設備
2か月前
ローム株式会社
電源回路
1か月前
株式会社ダイフク
物品搬送設備
13日前
ローム株式会社
電源回路
1か月前
株式会社ダイフク
物品搬送設備
7日前
株式会社ダイフク
物品搬送設備
7日前
キヤノン株式会社
情報処理装置
28日前
村田機械株式会社
搬送車システム
2か月前
東フロコーポレーション株式会社
流量制御装置
1か月前
旭精機工業株式会社
監視データ処理装置
14日前
CKD日機電装株式会社
モデルフリーポジカスト制御
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ