TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025011749
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023114034
出願日
2023-07-11
発明の名称
吐出圧力監視装置、吐出圧力監視方法、コンピュータプログラム、および塗布装置
出願人
株式会社SCREENホールディングス
代理人
個人
主分類
G05B
23/02 20060101AFI20250117BHJP(制御;調整)
要約
【課題】吐出圧力について、あらかじめ想定されていない未知の異常を適切に検知できる技術を提供する。
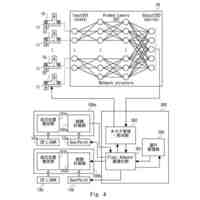
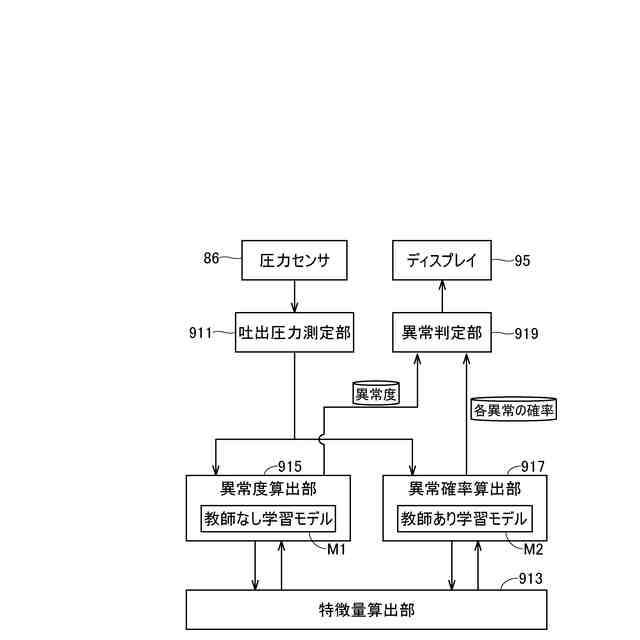
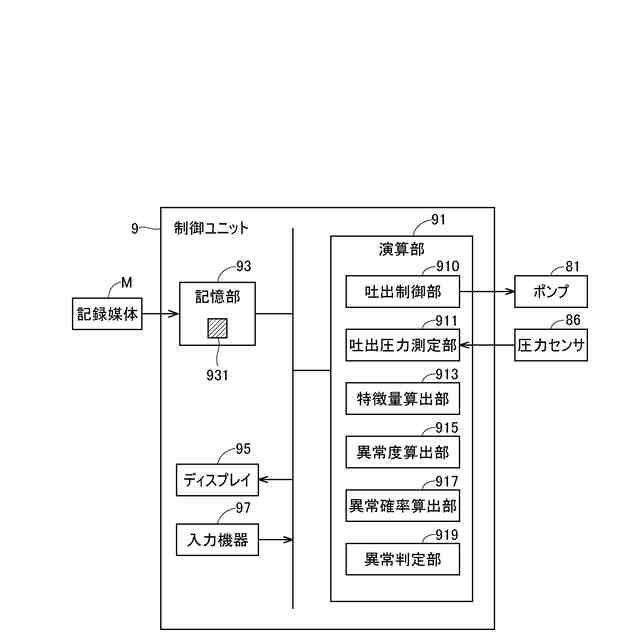
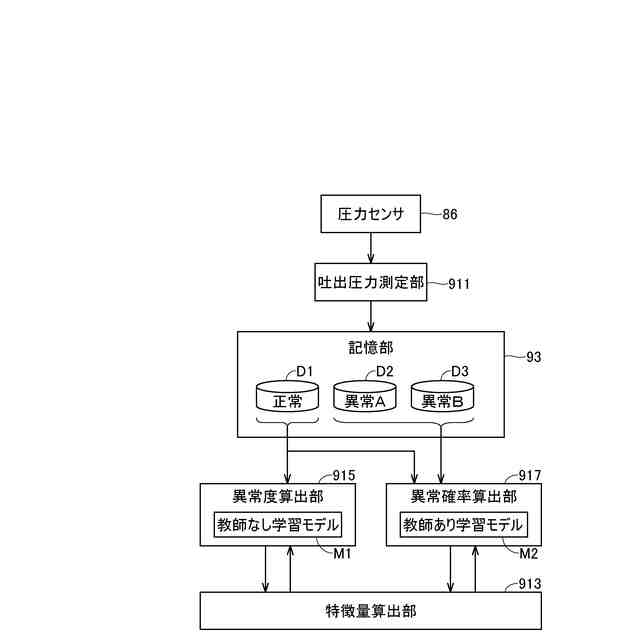
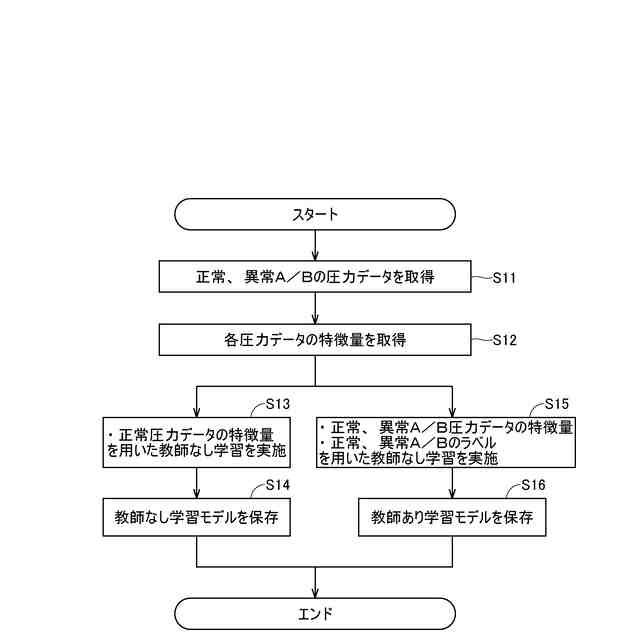
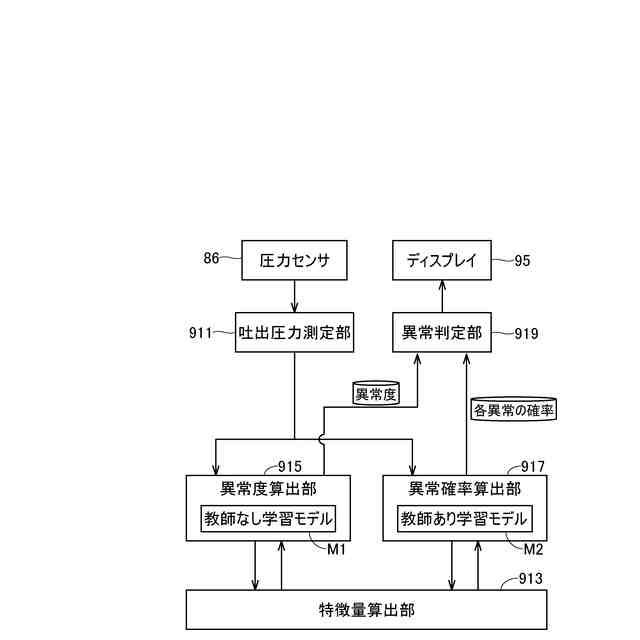
【解決手段】吐出圧力測定部911は、圧力データを取得する。特徴量算出部913は、圧力データの特徴量を算出する。異常度算出部915は、特徴量を入力とし、正常な特徴量の分布からの乖離の度合いを示す異常度を出力する教師なし学習モデルM1を用いて、特徴量算出部913によって算出された特徴量についての異常度を算出する。異常確率算出部917は、特徴量を入力とし、特定の異常A,Bに該当する確率を示す異常確率を出力する教師あり学習モデルM2を用いて、特徴量算出部913によって算出された特徴量についての異常確率を算出する。異常判定部919は、異常度算出部915によって算出された異常度と、異常確率算出部917によって算出された異常確率とを用いて、圧力データの異常を判定する。
【選択図】図9
特許請求の範囲
【請求項1】
吐出圧力監視装置であって、
処理液を吐出するノズル内の圧力の時間変化を示す圧力データを取得する圧力データ取得部と、
前記圧力データの特徴量を算出する特徴量算出部と、
前記特徴量を入力とし、正常な前記特徴量の分布からの乖離の度合いを示す異常度を出力する教師なし学習モデルを用いて、前記特徴量算出部によって算出された前記特徴量についての前記異常度を算出する異常度算出部と、
前記特徴量を入力とし、特定の異常に該当する確率を示す異常確率を出力する教師あり学習モデルを用いて、前記特徴量算出部によって算出された前記特徴量についての前記異常確率を算出する、異常確率算出部と、
前記異常度算出部によって算出された前記異常度と、前記異常確率算出部によって算出された前記異常確率とを用いて、前記圧力データの異常を判定する異常判定部と、
を備える、吐出圧力監視装置。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の吐出圧力監視装置であって、
前記教師なし学習モデルは、正常な複数の前記圧力データのみの特徴量を入力データとして用いた教師なし学習によって得られたモデルである、吐出圧力監視装置。
【請求項3】
請求項1または請求項2に記載の吐出圧力監視装置であって、
前記教師なし学習モデルは、前記異常度としてマハラノビス距離を出力する、吐出圧力監視装置。
【請求項4】
請求項1または請求項2に記載の吐出圧力監視装置あって、
前記教師あり学習モデルは、複数種類の特定の異常に該当する確率を出力する、吐出圧力監視装置。
【請求項5】
吐出圧力監視装置であって、
処理液を吐出するノズル内の圧力の時間変化を示す圧力データを取得する圧力データ取得部と、
前記圧力データの特徴量を算出する特徴量算出部と、
前記特徴量算出部によって算出された前記特徴量について、正常な前記特徴量からの乖離の度合いを示す異常度を算出する異常度算出部と、
前記特徴量を入力とし、特定の異常に該当する確率を示す異常確率を出力する教師あり学習モデルを用いて、前記特徴量算出部によって算出された前記特徴量についての前記異常確率を算出する、異常確率算出部と、
前記異常度算出部によって算出された前記異常度と、前記異常確率算出部によって算出された前記異常確率とを用いて、前記圧力データの異常を判定する異常判定部と、
を備える、吐出圧力監視装置。
【請求項6】
吐出圧力監視方法であって、
a) 処理液を吐出するノズル内の圧力の時間変化を示す圧力データを取得する工程と、
b) 前記圧力データの特徴量を算出する工程と、
c) 前記特徴量を入力とし、正常な前記特徴量の分布からの乖離の度合いを示す異常度を出力する教師なし学習モデルを用いて、前記工程b)によって算出された前記特徴量についての前記異常度を算出する工程と、
d) 前記特徴量を入力とし、特定の異常に該当する確率を示す異常確率を出力する教師あり学習モデルを用いて、前記工程b)によって算出された前記特徴量についての前記異常確率を算出する工程と、
e) 前記工程c)によって算出された前記異常度と、前記工程d)によって算出された前記異常確率とを用いて、前記圧力データの異常を判定する工程と、
を含む、吐出圧力監視方法。
【請求項7】
吐出圧力監視方法であって、
A) 処理液を吐出するノズル内の圧力の時間変化を示す圧力データを取得する工程と、
B) 前記圧力データの特徴量を算出する工程と、
C) 前記工程B)によって算出された前記特徴量について、正常な前記特徴量からの乖離の度合いを示す異常度を算出する工程と、
D) 前記特徴量を入力とし、特定の異常に該当する確率を示す異常確率を出力する教師あり学習モデルを用いて、前記工程B)によって算出された前記特徴量についての前記異常確率を算出する工程と、
E) 前記工程C)によって算出された前記異常度と、前記工程D)によって算出された前記異常確率とを用いて、前記圧力データの異常を判定する工程と、
を含む、吐出圧力監視方法。
【請求項8】
コンピュータが実行可能なコンピュータプログラムであって、
前記コンピュータに請求項6または請求項7に記載の吐出圧力監視方法を実行させる、コンピュータプログラム。
【請求項9】
塗布装置であって、
基板を保持する基板保持部と、
前記基板保持部に保持された前記基板に向けて、処理液を吐出するノズルと、
前記ノズル内の圧力を測定する圧力センサと、
請求項1、請求項2または請求項5に記載の吐出圧力監視装置と、
を備える、塗布装置。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示される主題は、吐出圧力監視装置、吐出圧力監視方法、コンピュータプログラム、および塗布装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
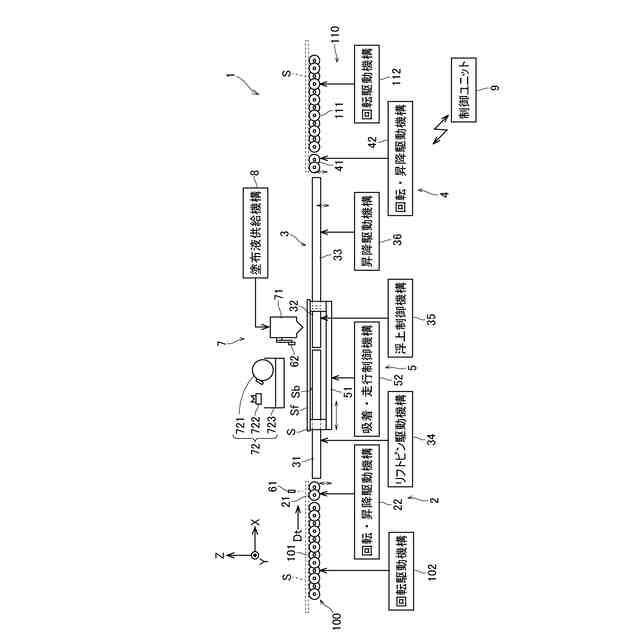
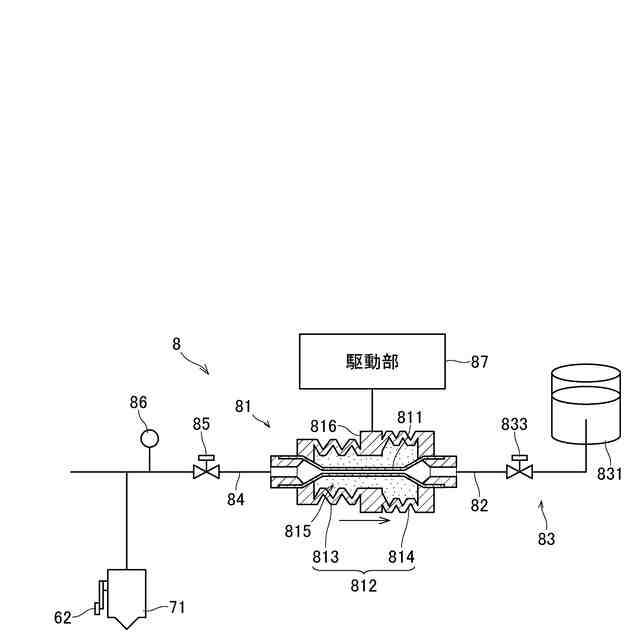
フラットパネルディスプレイの製造工程では、コータと呼ばれる装置が用いられている。コータは、ポンプの駆動によって処理液をスリットノズルから吐出し、搬送されている基板全体に処理液を塗布する。このようなコータには、近年製品の高品質化に伴い、処理液の膜厚が基板全体で均一となるように、処理液を塗布することが求められている。膜厚の均一性を一定に保つ上では、生産中に処理液の吐出圧力(吐出流量)を監視することが重要とされている。例えば、特許文献1では、吐出圧力に関連するパラメータの最適化が図られている。
【0003】
ところで、圧力センサから取得した吐出圧力について、微小な変化の異常を単純な閾値で検知することは困難である。これに対して、一般的な技術として、機械学習を用いた異常検知を行なう手法、装置システムが多数提案されている。
【0004】
例えば、特許文献2では、与えられたセンサ情報から異常の種類(モード)の判別を行うことが可能なシステムを構築することが提案されている。このようなシステム構築により、部品交換などの具体的な対策計画を立てることが可能となるほか、故障まで発展する可能性がある軽微な変化(予兆)を捉えることが可能な故障予知システムとして機能させることができる。
【先行技術文献】
【特許文献】
【0005】
特開2020-040046号公報
特開2022-125288号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献2は、故障を予知するシステムとして、教師なし学習を用いた手法と、教師あり学習を用いた手法とを提案している。しかしながら、教師なし学習は、正常状態のデータを学習し、新たに測定されたデータの正常状態からの乖離度を評価する手法であるため、異常を検知することは可能であるものの、異常の種類を判別することはできなかった。また、教師あり学習は、あらかじめ異常の種類のラベルが付された教師データを学習することにより、異常の種類を判別することが可能であるものの、どのような異常であっても、学習時にあらかじめ想定された異常の種類に振り分けるため、未知の異常に対応することができなかった。
【0007】
本発明の目的は、吐出圧力について、あらかじめ想定されていない未知の異常を適切に検知できる技術を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するため、第1態様は、吐出圧力監視装置であって、処理液を吐出するノズル内の圧力の時間変化を示す圧力データを取得する圧力データ取得部と、前記圧力データの特徴量を算出する特徴量算出部と、前記特徴量を入力とし、正常な前記特徴量の分布からの乖離の度合いを示す異常度を出力する教師なし学習モデルを用いて、前記特徴量算出部によって算出された前記特徴量についての前記異常度を算出する異常度算出部と、前記特徴量を入力とし、特定の異常に該当する確率を示す異常確率を出力する教師あり学習モデルを用いて、前記特徴量算出部によって算出された前記特徴量についての前記異常確率を算出する、異常確率算出部と、前記異常度算出部によって算出された前記異常度と、前記異常確率算出部によって算出された前記異常確率とを用いて、前記圧力データの異常を判定する異常判定部と、を備える。
【0009】
第2態様は、第1態様の吐出圧力監視装置であって、前記教師なし学習モデルは、正常な複数の前記圧力データのみの特徴量を入力データとして用いた教師なし学習によって得られたモデルである。
【0010】
第3態様は、第1態様または第2態様の吐出圧力監視装置であって、前記教師なし学習モデルは、前記異常度としてマハラノビス距離を出力する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
4日前
村田機械株式会社
産業機械
18日前
トヨタ自動車株式会社
自律移動体
18日前
トヨタ自動車株式会社
配送システム
1か月前
株式会社クボタ
作業車
18日前
株式会社明電舎
車両
18日前
アズビル株式会社
パラメータ調整装置
27日前
株式会社フジキン
流体制御装置
1か月前
株式会社村田製作所
温度補償回路
4日前
株式会社ダイフク
搬送設備
5日前
トヨタ自動車株式会社
ロボットシステム
26日前
トヨタ自動車株式会社
ロボットシステム
18日前
ローム株式会社
電源回路
1か月前
株式会社ダイフク
物品搬送設備
11日前
キヤノン株式会社
情報処理装置
26日前
ローム株式会社
電源回路
1か月前
株式会社ダイフク
物品搬送設備
5日前
株式会社ダイフク
物品搬送設備
5日前
株式会社ダイフク
物品搬送設備
2か月前
旭精機工業株式会社
監視データ処理装置
12日前
トヨタ自動車株式会社
群制御システム及び方法
2か月前
東フロコーポレーション株式会社
流量制御装置
1か月前
株式会社ダイフク
情報表示システム
1か月前
ブラザー工業株式会社
数値制御装置及び工作機械
18日前
ローム株式会社
リニア電源
2か月前
株式会社日立製作所
移動体制御システム
1か月前
ローム株式会社
リニア電源
2か月前
株式会社ディスコ
搬送車
26日前
株式会社日立製作所
診断装置および診断方法
1か月前
花王株式会社
物品の製造方法
1か月前
ローム株式会社
定電圧生成回路
18日前
ローム株式会社
定電圧生成回路
20日前
ローム株式会社
定電圧生成回路
2か月前
キヤノン株式会社
制御システム及び制御方法
11日前
トヨタ自動車株式会社
制御装置
1か月前
トヨタ自動車株式会社
制御装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ