TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024173590
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023185261
出願日
2023-10-30
発明の名称
制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
G05D
1/249 20240101AFI20241205BHJP(制御;調整)
要約
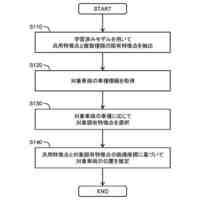
【課題】移動体の制御に周期遅れが発生する可能性を低減する技術を提供する。
【解決手段】本開示の制御装置は、測距装置を用いて測定された移動体の3次元点群データを用いて、移動体を制御するための制御指令を生成する。制御装置は、3次元点群データのうちの一部のみを含む範囲である使用範囲を特定する範囲特定部と、使用範囲の3次元点群データを用いて移動体の位置及び向きの少なくとも一方を推定する推定部と、を備える。
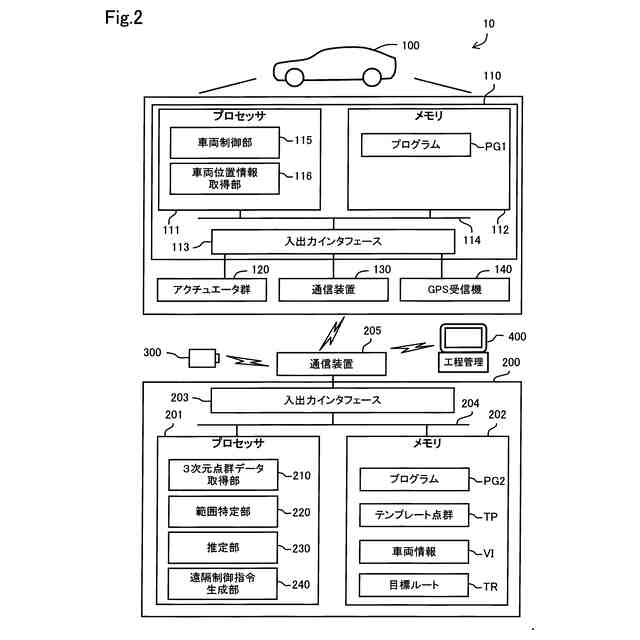
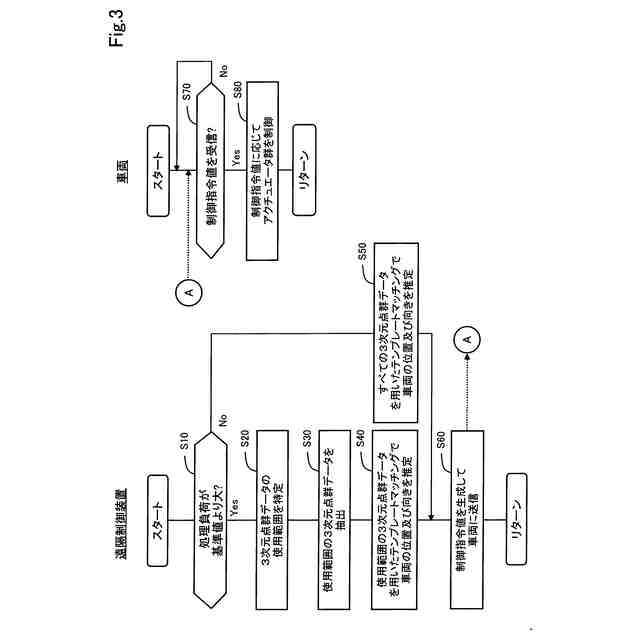
【選択図】図2
特許請求の範囲
【請求項1】
測距装置を用いて測定された移動体の3次元点群データを用いて、前記移動体を制御するための制御指令を生成する制御装置であって、
前記3次元点群データのうちの一部のみを含む範囲である使用範囲を特定する範囲特定部と、
前記使用範囲の前記3次元点群データを用いて前記移動体の位置及び向きの少なくとも一方を推定する推定部と、
を備える制御装置。
続きを表示(約 360 文字)
【請求項2】
請求項1に記載の制御装置であって、
前記使用範囲は、前記測距装置で観察され得る前記移動体の観察領域のうちで、特徴量の密度が前記観察領域における平均値よりも高い特徴部分を含むように特定される、制御装置。
【請求項3】
請求項2に記載の制御装置であって、
前記特徴部分は、前記移動体の型式と、前記測距装置による前記移動体の検知方向と、前記測距装置と前記移動体の距離と、に応じて決定される、制御装置。
【請求項4】
請求項1に記載の制御装置であって、
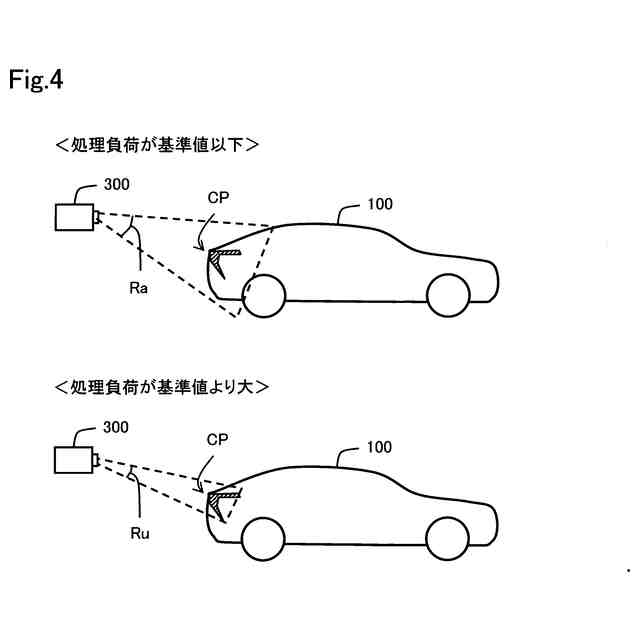
前記範囲特定部は、前記制御装置の処理負荷が予め設定された基準値よりも大きな場合に前記使用範囲を特定する処理を実行し、前記処理負荷が前記基準値以下の場合には前記使用範囲を特定する処理を実行しない、制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体の制御装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
車両の製造工程において、車両を自走搬送させる技術が知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特表2017-538619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両などの移動体を自走搬送により移動させる際に、移動体の位置や向きを推定する処理が実行される。移動体の位置や向きは、カメラやレーダーなどの測距装置を用いて取得した3次元点群データを用いて推定できる。この推定処理は、移動体の走行制御の安定化の為に、早い周期での算出が必要になる。しかしながら、大量の3次元点群データを処理するためには長い処理時間を要するので、移動体の制御に周期遅れが発生する可能性がある。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の一形態によれば、測距装置を用いて測定された移動体の3次元点群データを用いて、前記移動体を制御するための制御指令を生成する制御装置が提供される。この制御装置は、前記3次元点群データのうちの一部のみを含む範囲である使用範囲を特定する範囲特定部と、前記使用範囲の前記3次元点群データを用いて前記移動体の位置及び向きの少なくとも一方を推定する推定部と、を備える。
この制御装置によれば、3次元点群データの一部のみを使用して移動体の位置及び向きの少なくとも一方を推定するので、移動体の制御に周期遅れが発生する可能性を低減できる。
(2)上記制御装置において、前記使用範囲は、前記測距装置で観察され得る前記移動体の観察領域のうちで、特徴量の密度が前記観察領域における平均値よりも高い特徴部分を含むように特定されるものとしてもよい。
この制御装置によれば、適切な使用範囲を設定できる。
(3)上記制御装置において、前記特徴部分は、前記移動体の型式と、前記測距装置による前記移動体の検知方向と、前記測距装置と前記移動体の距離と、に応じて決定されるものとしてもよい。
この制御装置によれば、移動体の位置と向きの少なくとも一方を推定するための有効な使用範囲を正確に特定できる。
(4)上記制御装置において、前記範囲特定部は、前記制御装置の処理負荷が予め設定された基準値よりも大きな場合に前記使用範囲を特定する処理を実行し、前記処理負荷が前記基準値以下の場合には前記使用範囲を特定する処理を実行しないものとしてもよい。
この制御装置によれば、制御装置の処理負荷が高い場合に、移動体の制御に周期遅れが発生する可能性を低減できる。
【図面の簡単な説明】
【0007】
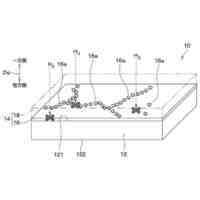
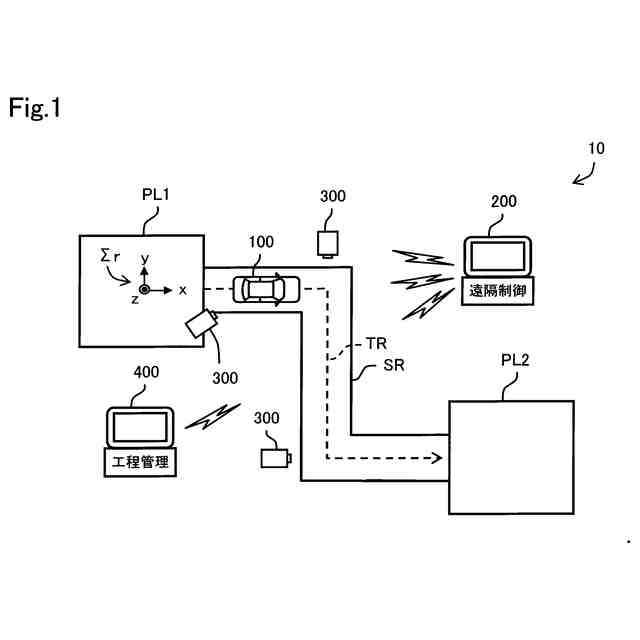
実施形態における遠隔制御システムの構成を示す概念図。
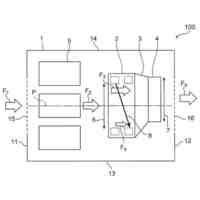
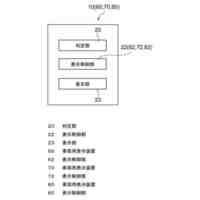
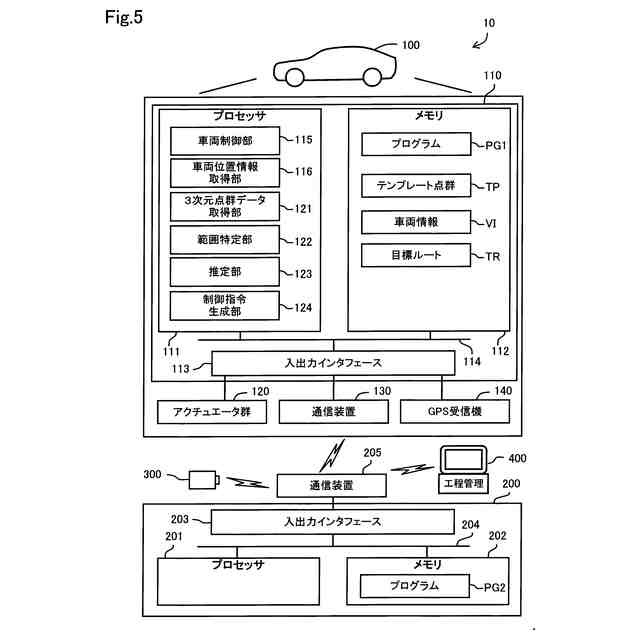
第1実施形態における車両と遠隔制御装置の構成を示すブロック図。
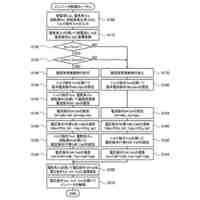
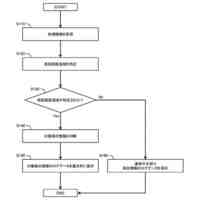
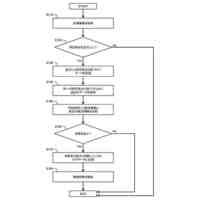
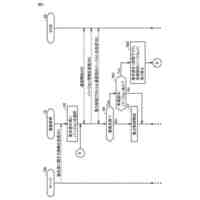
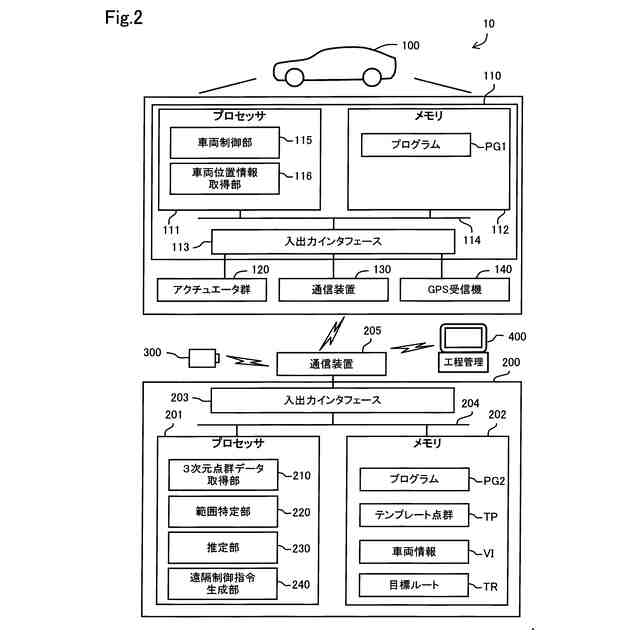
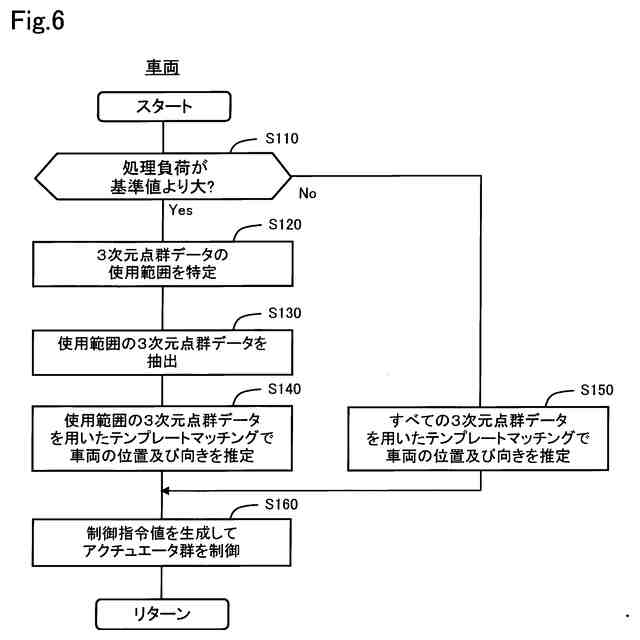
第1実施形態における遠隔制御の処理手順を示すフローチャート。
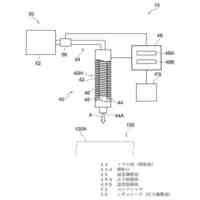
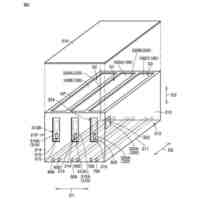
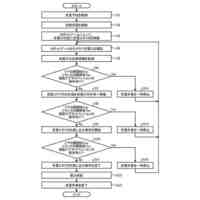
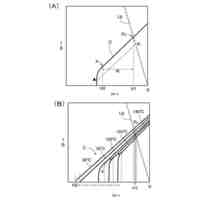
3次元点群データの使用範囲を特定する処理を示す説明図。
第2実施形態における車両と遠隔制御装置の構成を示すブロック図。
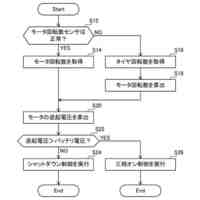
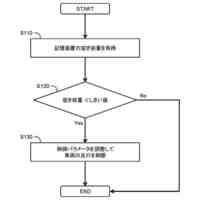
第2実施形態における車両制御の処理手順を示すフローチャート。
【発明を実施するための形態】
【0008】
A.第1実施形態
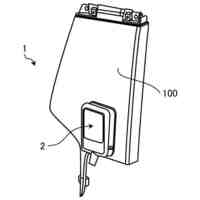
図1は、実施形態における遠隔制御システム10の構成を示す概念図である。遠隔制御システム10は、移動体としての1台以上の車両100と、車両100を遠隔制御するための制御指令を生成して車両100に送信する遠隔制御装置200と、車両100の3次元点群データを測定する複数の測距装置300と、車両100の製造工程の管理を行う工程管理装置400と、を備える。第1実施形態では、遠隔制御装置200が本開示の「制御装置」に相当する。
【0009】
車両100は、電気自動車(BEV:Battery Electric Vehicle)であることが好ましい。なお、移動体は、電気自動車に限られず、例えば、ガソリン自動車や、ハイブリッド自動車や、燃料電池自動車でもよい。移動体は、車両100に限られず、例えば、電動垂直離着陸機(いわゆる空飛ぶ自動車)でもよい。
【0010】
本開示において、「移動体」は、移動し得る物体を意味する。車両は、車輪によって走行する車両であっても無限軌道によって走行する車両であってもよく、例えば、乗用車、トラック、バス、二輪車、四輪車、戦車、工事用車両などである。移動体が車両以外である場合には、本開示における「車両」「車」との表現を、適宜に「移動体」に置き換えることができ、「走行」との表現を、適宜に「移動」に置き換えることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
給電装置
今日
トヨタ自動車株式会社
生成装置
今日
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
電動車両
今日
トヨタ自動車株式会社
破袋装置
今日
トヨタ自動車株式会社
情報処理方法
今日
トヨタ自動車株式会社
制御システム
今日
トヨタ自動車株式会社
蓄電モジュール
今日
トヨタ自動車株式会社
成形型ユニット
今日
トヨタ自動車株式会社
蓄電モジュール
今日
トヨタ自動車株式会社
自動運転システム
今日
トヨタ自動車株式会社
自動運転システム
今日
トヨタ自動車株式会社
自動運転システム
今日
トヨタ自動車株式会社
燃料電池システム
今日
トヨタ自動車株式会社
自動運転システム
今日
トヨタ自動車株式会社
自動充電システム
今日
トヨタ自動車株式会社
車両制御システム
今日
トヨタ自動車株式会社
車両の制振制御装置
今日
トヨタ自動車株式会社
走行経路管理システム
今日
トヨタ自動車株式会社
走行中非接触給電システム
今日
トヨタ自動車株式会社
電動車の駆動モータ制御装置
今日
トヨタ自動車株式会社
制御装置および無人運転方法
3日前
トヨタ自動車株式会社
自動運転システム及び制御方法
今日
トヨタ自動車株式会社
ログ管理システム、ログ管理方法
今日
株式会社デンソー
ガスバリア被膜体
今日
トヨタ自動車株式会社
車両位置推定システム、学習済みモデルの生成方法
今日
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
車両用表示装置
1日前
トヨタ自動車株式会社
電動車の駆動用バッテリ回路システムに於けるリレーの溶着の診断方法
今日
トヨタ自動車株式会社
電動車両および電動車両システム
3日前
個人
方向検出器
2か月前
積水樹脂株式会社
磁性シート
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ