TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025010851
公報種別
公開特許公報(A)
公開日
2025-01-23
出願番号
2023113115
出願日
2023-07-10
発明の名称
車両位置推定システム、学習済みモデルの生成方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G06T
7/70 20170101AFI20250116BHJP(計算;計数)
要約
【課題】カメラによって撮像された撮像画像に映る車両の位置を高い精度で推定する車両位置推定システムを提供する。
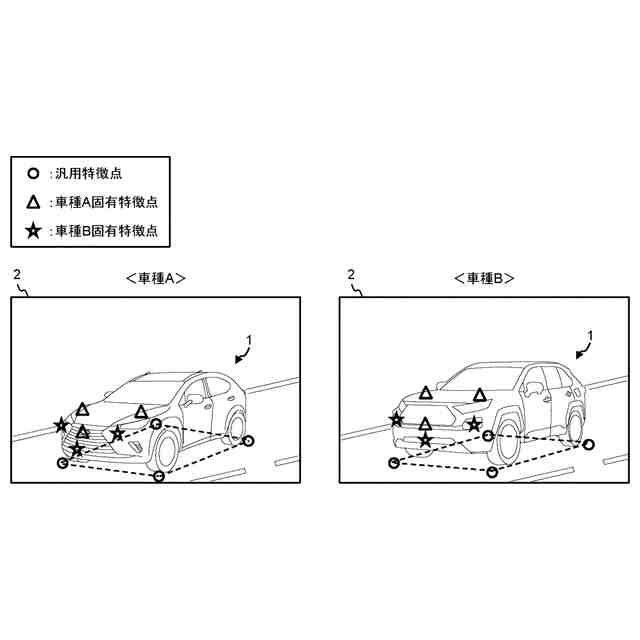
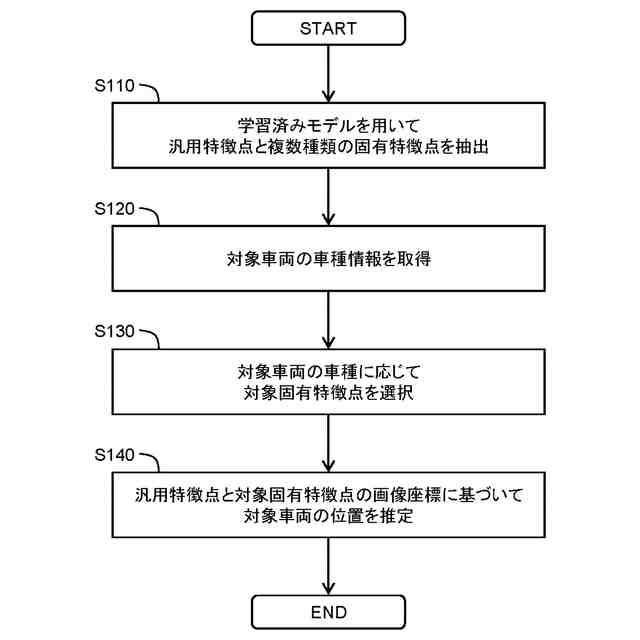
【解決手段】車両位置推定システムは、機械学習によって予め生成された学習済みモデルを用いて、撮像画像の中から車種に依らない特徴点を示す汎用特徴点と複数種類の適応車種のそれぞれと対応した特徴点を示す複数種類の固有特徴点とを抽出し、対象車両の車種に応じて、複数種類の固有特徴点の中から対象固有特徴点を選択し、汎用特徴点と対象固有特徴点の画像座標に基づいて対象車両の位置を推定する。
【選択図】図5
特許請求の範囲
【請求項1】
カメラと、
前記カメラによって撮像された撮像画像に映る対象車両の位置の推定を行う1又は複数のプロセッサを備え、
前記1又は複数のプロセッサは、
機械学習によって予め生成された学習済みモデルを用いて、前記撮像画像の中から車種に依らない特徴点を示す汎用特徴点と複数の適応車種のそれぞれと対応した特徴点を示す複数種類の固有特徴点とを抽出する処理と、
前記対象車両の車種の情報を取得する処理と、
前記対象車両の車種に応じて、前記複数種類の固有特徴点の中から対象固有特徴点を選択する処理と、
前記汎用特徴点と前記対象固有特徴点の画像座標に基づいて前記対象車両の位置を推定する処理と、
を実行するように構成されている
車両位置推定システム。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の車両位置推定システムであって、
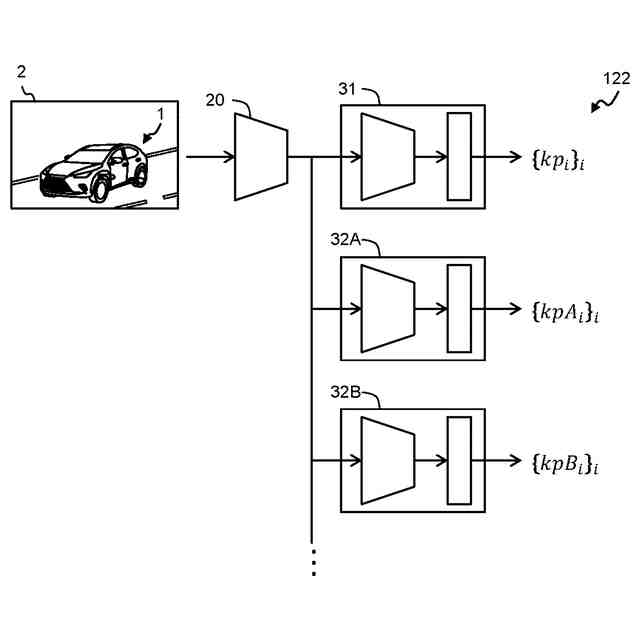
前記学習済みモデルは、
前記撮像画像を入力とする上段層と、
前記上段層の出力を入力として前記汎用特徴点を出力する汎用特徴点抽出層と、
前記複数の適応車種のそれぞれと対応し、それぞれが前記上段層の出力を入力として対応する適応車種に応じた固有特徴点を出力する複数の固有特徴点抽出層と、
から構成され、
前記上段層及び前記汎用特徴点抽出層は、車種を指定しない種々の車両が映る複数の画像で構成された訓練データにより学習されており、
前記複数の固有特徴点抽出層の各々は、前記対応する適応車種の車両が映る複数の画像で構成された訓練データにより学習されている
ことを特徴とする
車両位置推定システム。
【請求項3】
請求項1又は2に記載の車両位置推定システムであって、
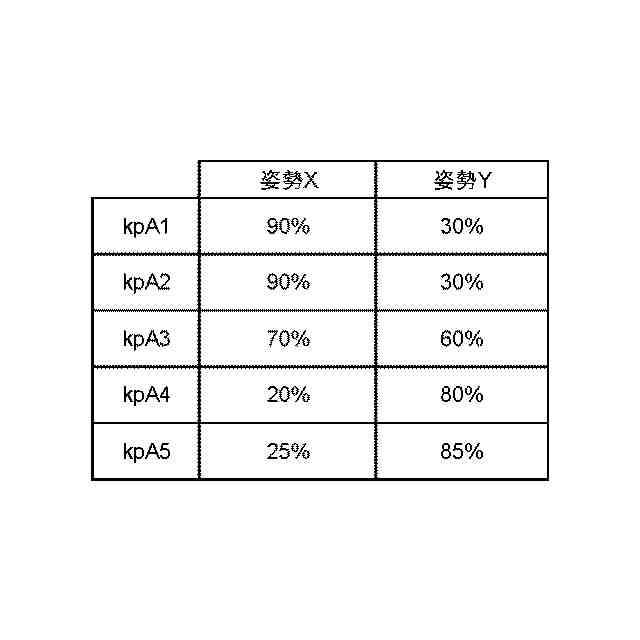
前記複数種類の固有特徴点の各々は、車両の姿勢によって分類された複数種類の姿勢別特徴点を含み、
前記1又は複数のプロセッサは、前記対象車両の姿勢の情報を取得する処理をさらに実行するように構成され、
前記対象固有特徴点を選択する処理は、
前記複数種類の固有特徴点の中から前記対象車両の車種に応じた固有特徴点を選択することと、
選択された固有特徴点に含まれる前記複数種類の姿勢別特徴点うち前記対象車両の姿勢に応じた姿勢別特徴点を前記対象固有特徴点として選択することと、
を含む
ことを特徴とする
車両位置推定システム。
【請求項4】
請求項1又は2に記載の車両位置推定システムであって、
前記複数種類の固有特徴点の各々は、車両の姿勢に応じて変化する信頼度が与えられた複数の特徴点を含み、
前記1又は複数のプロセッサは、前記対象車両の姿勢の情報を取得する処理をさらに実行するように構成され、
前記対象固有特徴点を選択することは、
前記複数種類の固有特徴点のうち前記対象車両の車種に応じた固有特徴点を前記対象固有特徴点として選択することと、
前記対象車両の姿勢に基づいて、前記対象固有特徴点の中から前記信頼度がしきい値未満となる特徴点を除くことと、
を含む
ことを特徴とする
車両位置推定システム。
【請求項5】
対象画像に映る車両の特徴点を抽出するようにコンピュータを機能させるための学習済みモデルの生成方法であって、
前記学習済みモデルは、
前記対象画像を入力とする上段層と、
前記上段層の出力を入力として前記車両の特徴点を出力する汎用特徴点抽出層と、
複数の適応車種のそれぞれと対応し、それぞれが前記上段層の出力を入力として前記車両の特徴点を出力する複数の固有特徴点抽出層と、
から構成されており、
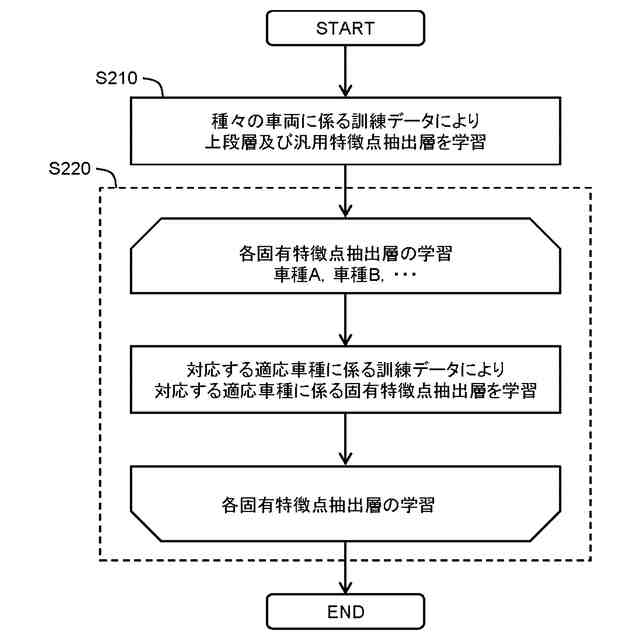
車種を指定しない種々の車両が映る複数の画像で構成された訓練データにより前記上段層及び前記汎用特徴点抽出層を学習することと、
対応する適応車種の車両が映る複数の画像で構成された訓練データにより前記複数の固有特徴点抽出層の各々を学習することと、
を含む
生成方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の位置を推定する技術に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
車両の位置の推定精度を向上させるための様々な技術が提案されている。例えば、特許文献1には、GPSによる衛生信号の利用が困難な場合であっても、複数の車両の間の相対的な位置及び姿勢を高精度に推定するための技術が開示されている。その他、本技術分野の技術レベルを示す文献として、以下の特許文献2がある。
【先行技術文献】
【特許文献】
【0003】
特開2021-189910号公報
特開2016-184316号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両の位置を推定する技術に関して、カメラによって撮像された撮像画像に映る車両の位置を推定する技術に対するニーズがある。例えば、カメラによって撮像された撮像画像に映る車両の推定位置は、AVP(Auto Valet Parking)システム、自動運転システム、コネクティッドサービス、等の機能で活用することができる。しかしながら、従来、十分な精度の推定位置を得ることができていない。
【0005】
本開示の1つの目的は、上記の課題を鑑みたものであり、カメラによって撮像された撮像画像に映る車両の位置を推定する技術に関して、推定精度を向上させることができる技術を提供することにある。
【課題を解決するための手段】
【0006】
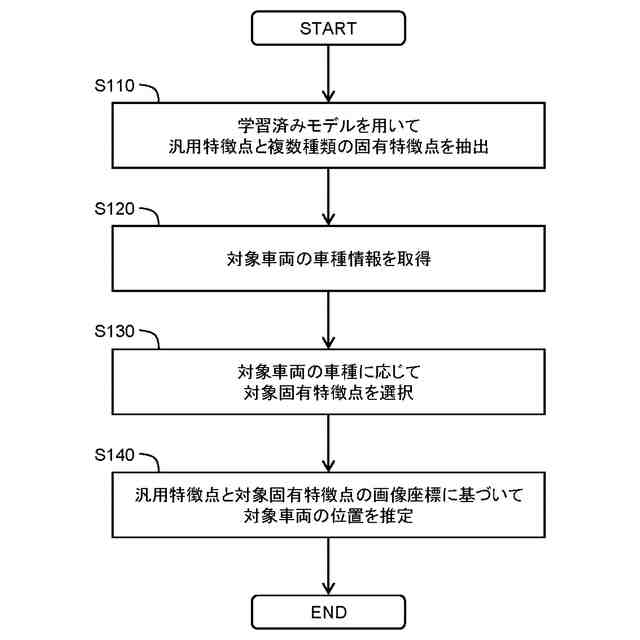
本開示の第1の観点は、車両位置推定システムに関する。第1の観点に係る車両位置推定システムは、カメラと、カメラによって撮像された撮像画像に映る対象車両の位置の推定を行う1又は複数のプロセッサを備える。1又は複数のプロセッサは、機械学習によって予め生成された学習済みモデルを用いて、撮像画像の中から車種に依らない特徴点を示す汎用特徴点と複数種類の適応車種のそれぞれと対応した特徴点を示す複数種類の固有特徴点とを抽出する処理と、対象車両の車種の情報を取得する処理と、対象車両の車種に応じて、複数種類の固有特徴点の中から対象固有特徴点を選択する処理と、汎用特徴点と対象固有特徴点の画像座標に基づいて対象車両の位置を推定する処理と、を実行するように構成されている。
【0007】
本開示の第2の観点は、対象画像に映る車両の特徴点を抽出するようにコンピュータを機能させるための学習済みモデルの生成方法に関する。学習済みモデルは、対象画像を入力とする上段層と、上段層の出力を入力として車両の特徴点を出力する汎用特徴点抽出層と、複数の適応車種のそれぞれと対応し、それぞれが上段層の出力を入力として車両の特徴点を出力する複数の固有特徴点抽出層と、から構成される。第2の観点に係る生成方法は、車種を指定しない種々の車両が映る複数の画像で構成された訓練データにより上段層及び汎用特徴点抽出層を学習することと、対応する適応車種の車両が映る複数の画像で構成された訓練データにより複数の固有特徴点抽出層の各々を学習することと、を含む。
【発明の効果】
【0008】
本開示によれば、汎用特徴点に加えて対象車両の車種に最適化された対象固有特徴点の画像座標を用いて対象車両の位置を推定することができるので、推定精度を向上させることができる。
【図面の簡単な説明】
【0009】
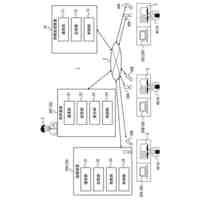
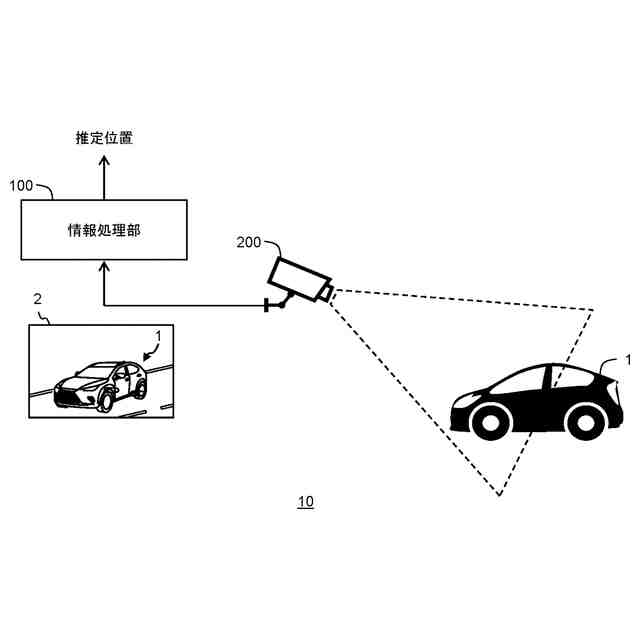
実施形態に係る車両位置推定システムの概略を示す図である。
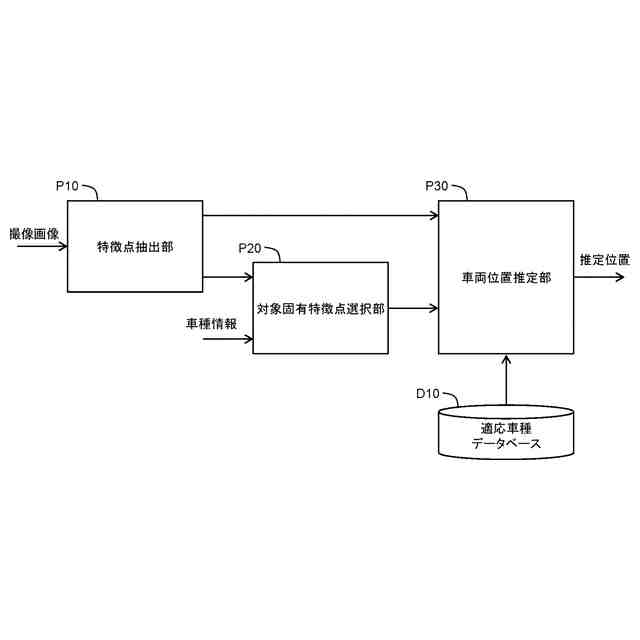
第1実施形態に係る車両位置推定機能の構成の一例を示す図である。
抽出される特徴点の一例を示す図である。
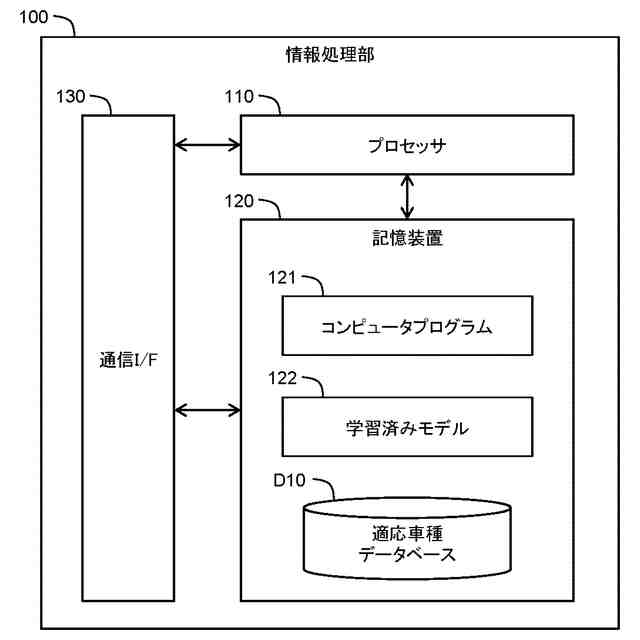
実施形態に係る情報処理部のハードウェア構成の一例を示す図である。
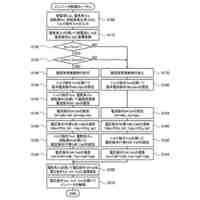
第1実施形態に係る情報処理部によって実行される処理を示す図である。
実施形態に係る学習済みモデルについて説明するための図である。
実施形態に係る学習済みモデルの生成方法を示す図である。
第2実施形態に係る車両位置推定機能の構成の一例を示す図である。
第2実施形態に係る情報処理部によって実行される処理を示す図である。
【発明を実施するための形態】
【0010】
1 第1実施形態
1.1 車両位置推定システム
本実施形態に係る車両位置推定システムは、カメラによって撮像された撮像画像に映る車両の位置を推定する車両位置推定機能を提供する。図1は、本実施形態に係る車両位置推定システム10の概略を示す図である。車両位置推定システム10は、情報処理部100と、カメラ200と、を含んでいる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
電動車
3日前
トヨタ自動車株式会社
検査方法
3日前
トヨタ自動車株式会社
固体電池
3日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
固体電池
3日前
トヨタ自動車株式会社
生成装置
今日
トヨタ自動車株式会社
蓄電セル
6日前
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
破袋装置
今日
トヨタ自動車株式会社
蓄電セル
3日前
トヨタ自動車株式会社
給電装置
今日
トヨタ自動車株式会社
切断装置
6日前
トヨタ自動車株式会社
電動車両
今日
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
高圧タンク
6日前
トヨタ自動車株式会社
電池パック
3日前
トヨタ自動車株式会社
自律移動体
6日前
トヨタ自動車株式会社
膜電極接合体
3日前
トヨタ自動車株式会社
車両制御装置
3日前
トヨタ自動車株式会社
情報処理方法
3日前
トヨタ自動車株式会社
情報処理装置
3日前
トヨタ自動車株式会社
電池スタック
3日前
トヨタ自動車株式会社
情報処理方法
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ