TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025010819
公報種別
公開特許公報(A)
公開日
2025-01-23
出願番号
2023113056
出願日
2023-07-10
発明の名称
自動充電システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
H02J
7/00 20060101AFI20250116BHJP(電力の発電,変換,配電)
要約
【課題】最新の充電口の位置情報に基づいて充電コネクタを充電口に差し込むことができる自動充電システムを提供すること。
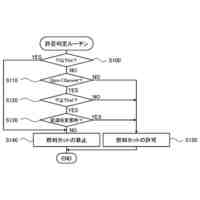
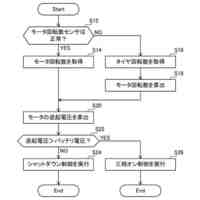
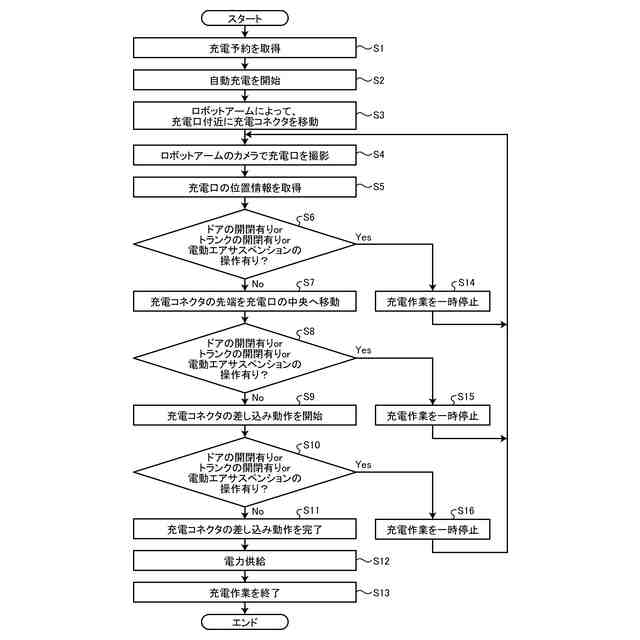
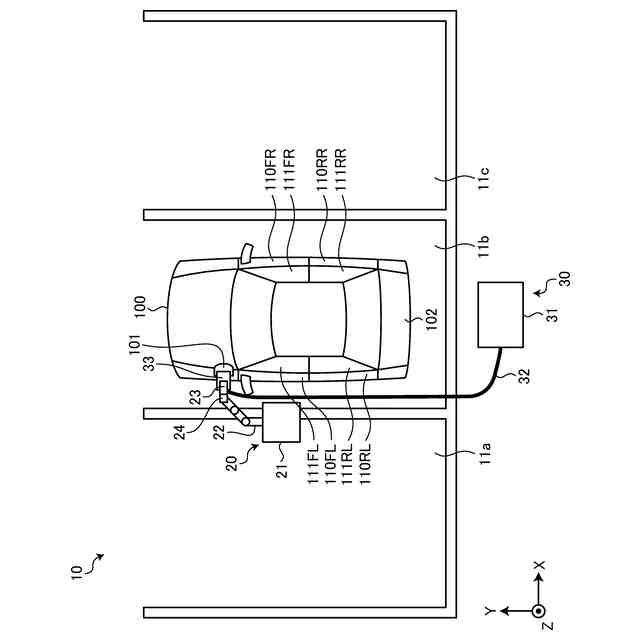
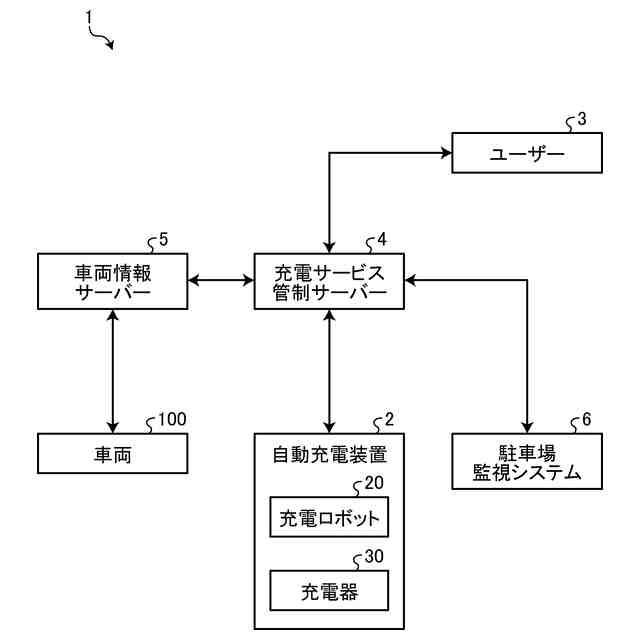
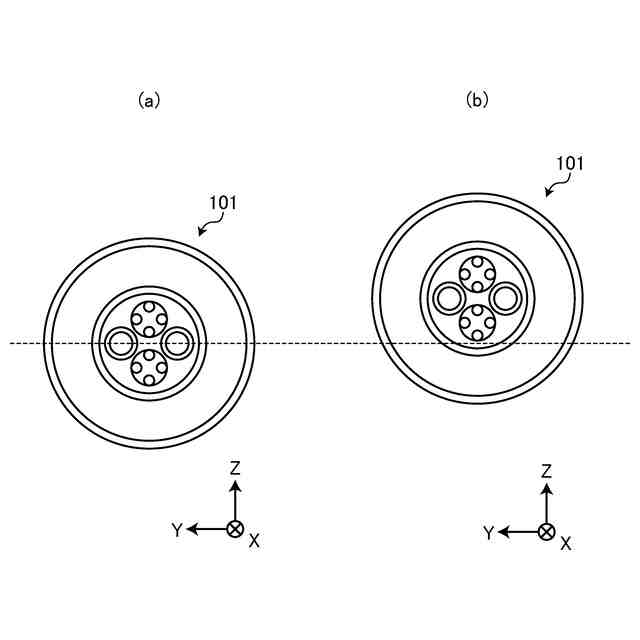
【解決手段】本発明の自動充電システムは、蓄電装置から供給される電力によって駆動される車両と、充電コネクタを有する充電ケーブルを備えた充電器と、駐車スペースに位置する車両の充電口の位置情報を取得する位置情報取得装置と、充電コネクタを掴み、充電口に対する充電コネクタの抜き差しを自動的に行うロボットアームを備えた充電ロボットと、によって構成され、充電ロボットが位置情報に基づいて充電口に充電コネクタを差し込んで、充電器から蓄電装置に電力を供給して充電する自動充電システムであって、充電口が上下方向に変位し得る動作を検出する検出装置を有し、位置情報取得装置が位置情報を取得してから充電口への充電コネクタの差し込みが完了するまでの間に、充電口が上下方向に変位し得る動作を検出装置が検出した場合には、位置情報取得装置による位置情報の取得をやり直す。
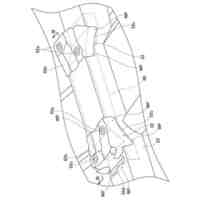
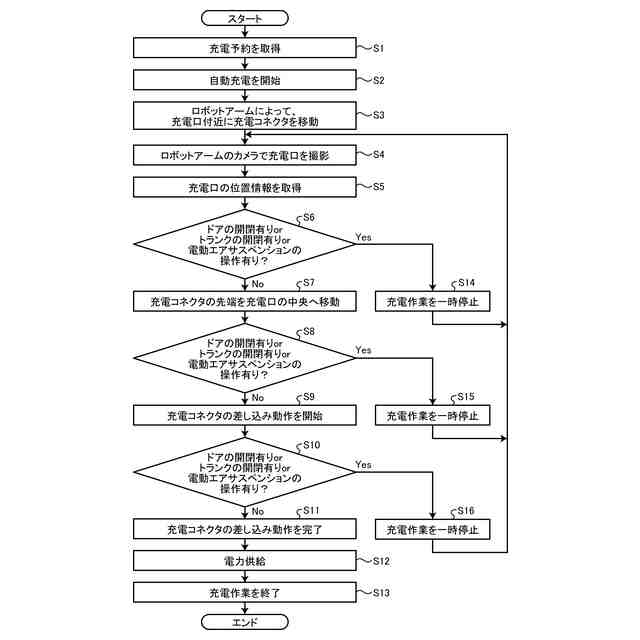
【選択図】図4
特許請求の範囲
【請求項1】
蓄電装置から供給される電力によって駆動される車両と、
充電コネクタを有する充電ケーブルを備えた充電器と、
駐車スペースに位置する前記車両の充電口の位置情報を取得する位置情報取得装置と、
前記充電コネクタを掴み、前記充電口に対する前記充電コネクタの抜き差しを自動的に行うロボットアームを備えた充電ロボットと、
によって構成され、
前記充電ロボットが前記位置情報に基づいて前記充電口に前記充電コネクタを差し込んで、前記充電器から前記蓄電装置に電力を供給して充電する自動充電システムであって、
前記充電口が上下方向に変位し得る動作を検出する検出装置を有し、
前記位置情報取得装置が前記位置情報を取得してから前記充電口への前記充電コネクタの差し込みが完了するまでの間に、前記充電口が上下方向に変位し得る動作を前記検出装置が検出した場合には、前記位置情報取得装置による前記位置情報の取得をやり直すことを特徴とする自動充電システム。
続きを表示(約 350 文字)
【請求項2】
前記位置情報取得装置は、前記ロボットアームに設けられ、前記充電口を撮像する撮像装置であることを特徴とする請求項1に記載の自動充電システム。
【請求項3】
前記充電口が上下方向に変位し得る動作は、前記車両に設けられたドアの開閉動作であることを特徴とする請求項1または2に記載の自動充電システム。
【請求項4】
前記充電口が上下方向に変位し得る動作は、前記車両に設けられたトランクの開閉動作であることを特徴とする請求項1または2に記載の自動充電システム。
【請求項5】
前記充電口が上下方向に変位し得る動作は、前記車両に設けられた電動エアサスペンションによる車高調整動作であることを特徴とする請求項1または2に記載の自動充電システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動充電システムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、給電ロボットが給電設備の給電コネクタを保持し、駐車スペースに駐車された車両へ移動して、車両に設けられたインレットに給電コネクトを接続することにより、給電設備から車両のバッテリーに電力を供給して充電する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-032721号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
給電ロボットによる充電中に乗員の乗り降りや荷物の載せ降ろしなどが行われ、最初に認識した充電口の位置とズレが生じると、給電コネクタを充電口に差し込むことができなくなるおそれがある。
【0005】
本発明は、上記課題に鑑みてなされたものであって、その目的は、最新の充電口の位置情報に基づいて充電コネクタを充電口に差し込むことができる自動充電システムを提供することである。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明に係る自動充電システムは、蓄電装置から供給される電力によって駆動される車両と、充電コネクタを有する充電ケーブルを備えた充電器と、駐車スペースに位置する前記車両の充電口の位置情報を取得する位置情報取得装置と、前記充電コネクタを掴み、前記充電口に対する前記充電コネクタの抜き差しを自動的に行うロボットアームを備えた充電ロボットと、によって構成され、前記充電ロボットが前記位置情報に基づいて前記充電口に前記充電コネクタを差し込んで、前記充電器から前記蓄電装置に電力を供給して充電する自動充電システムであって、前記充電口が上下方向に変位し得る動作を検出する検出装置を有し、前記位置情報取得装置が前記位置情報を取得してから前記充電口への前記充電コネクタの差し込みが完了するまでの間に、前記充電口が上下方向に変位し得る動作を前記検出装置が検出した場合には、前記位置情報取得装置による前記位置情報の取得をやり直すことを特徴とするものである。
【0007】
これにより、最新の充電口の位置情報に基づいて充電コネクタを充電口に差し込むことができる。
【0008】
また、上記において、前記位置情報取得装置は、前記ロボットアームに設けられ、前記充電口を撮像する撮像装置としてもよい。
【0009】
これにより、充電口の近くにロボットアームを移動させて、撮像装置により充電口を撮影して充電口の位置情報を取得することができる。
【0010】
また、上記において、前記充電口が上下方向に変位し得る動作は、前記車両に設けられたドアの開閉動作としてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
電動車
3日前
トヨタ自動車株式会社
蓄電セル
3日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
固体電池
3日前
トヨタ自動車株式会社
固体電池
3日前
トヨタ自動車株式会社
生成装置
今日
トヨタ自動車株式会社
電動車両
今日
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
検査方法
3日前
トヨタ自動車株式会社
破袋装置
今日
トヨタ自動車株式会社
給電装置
今日
トヨタ自動車株式会社
蓄電セル
6日前
トヨタ自動車株式会社
切断装置
6日前
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
電池パック
3日前
トヨタ自動車株式会社
高圧タンク
6日前
トヨタ自動車株式会社
自律移動体
6日前
トヨタ自動車株式会社
フロア構造
6日前
トヨタ自動車株式会社
情報処理装置
3日前
トヨタ自動車株式会社
車両制御装置
3日前
トヨタ自動車株式会社
車体下部構造
3日前
トヨタ自動車株式会社
情報処理方法
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ