TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025006916
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023107967
出願日
2023-06-30
発明の名称
車両
出願人
トヨタ自動車株式会社
代理人
弁理士法人深見特許事務所
主分類
B60W
50/023 20120101AFI20250109BHJP(車両一般)
要約
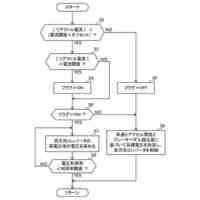
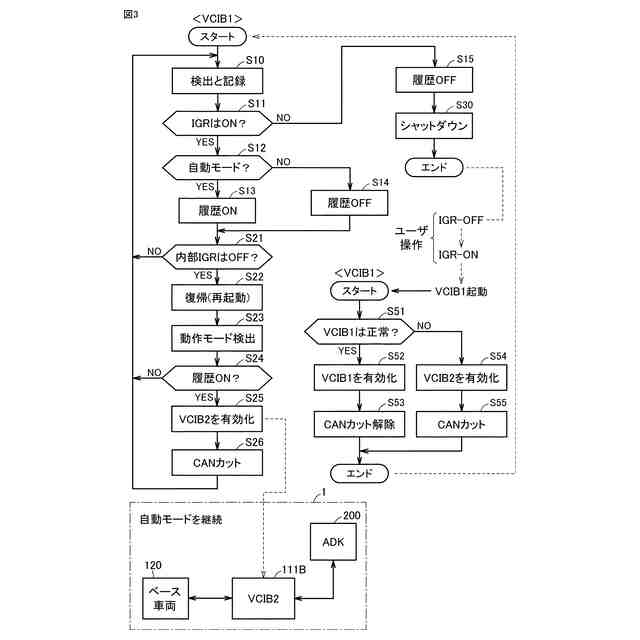
【課題】車両の動作モードを管理するコンピュータが自動モード中に何らかの事情によって停止した場合に、コンピュータの再起動後に車両が自動モードでの動作を継続する。
【解決手段】車両が、VP(車両プラットフォーム)とADK(自動運転キット)とを備える。VPは第1制御装置を備える。ADKは第2制御装置を備える。VPが備えるVCIB(車両制御インターフェースボックス)は、第1制御装置および第2制御装置の両方と通信可能に構成される第1コンピュータを含む。第1コンピュータは、自動モードおよび手動モードを含む選択肢から選ばれた動作モードを検出するとともに、検出された動作モードを示す動作モード情報を記録する。第1制御装置は、VCIBによって検出された動作モードに従って車両を制御する。第1コンピュータは、再起動時に、停止直前に記録した動作モード情報に基づいて、選ばれた動作モードを検出する。
【選択図】図3
特許請求の範囲
【請求項1】
車両プラットフォームと、自動運転のための指令を前記車両プラットフォームへ送信する自動運転キットとを備える車両であって、
前記車両プラットフォームは、第1制御装置を含むベース車両を備え、
前記自動運転キットは、自動運転制御に関する指令を決定する第2制御装置を備え、
前記車両プラットフォームは、前記第1制御装置および前記第2制御装置の両方と通信可能に構成される第1コンピュータを含む車両制御インターフェースボックスをさらに備え、
前記第1コンピュータは、前記車両プラットフォームが前記自動運転キットのコントロール下にある自動モードと、当該車両がドライバのコントロール下にある手動モードとを含む選択肢から選ばれた動作モードを検出するとともに、検出された前記動作モードを示す動作モード情報を記録し、
前記第1制御装置は、前記車両制御インターフェースボックスによって検出された前記動作モードに従って前記車両を制御するように構成され、
前記第1コンピュータは、再起動時に、停止直前に記録した前記動作モード情報に基づいて、前記選ばれた動作モードを検出する、車両。
続きを表示(約 1,200 文字)
【請求項2】
前記車両は、制御システムの作動/停止を切り替えるためのユーザ操作を受け付ける起動スイッチをさらに備え、
前記車両制御インターフェースボックスは、前記第1コンピュータと通信する第2コンピュータをさらに備え、
前記第1コンピュータは、前記起動スイッチの状態を検出するとともに、検出された前記動作モードが前記自動モードであり、かつ、検出された前記起動スイッチの状態が作動を示す場合に履歴情報を記録し、
前記第1コンピュータの停止直前に前記履歴情報が記録されている場合には、前記第1コンピュータの再起動後に前記第1コンピュータと前記第2コンピュータとの間の通信が停止される、請求項1に記載の車両。
【請求項3】
前記第2コンピュータは、前記第1制御装置および前記第2制御装置の両方と通信可能に構成され、
前記第1コンピュータは、前記第1コンピュータと前記第2コンピュータとのいずれか一方を、インターフェースコンピュータとして選ぶように構成され、
前記インターフェースコンピュータは、前記選ばれた動作モードを検出して前記第1制御装置へ出力し、
前記第1コンピュータと前記第2コンピュータとの間の通信が停止されている間は、前記第1コンピュータが前記第2コンピュータを前記インターフェースコンピュータとして選び、
前記第1コンピュータと前記第2コンピュータとの間の通信が停止された後、前記第1コンピュータが正常な状態で起動した場合には、前記第1コンピュータが、当該通信の停止を解除するとともに、当該第1コンピュータを前記インターフェースコンピュータとして選ぶ、請求項2に記載の車両。
【請求項4】
前記第1制御装置は、前記ベース車両に関する車両情報を前記車両制御インターフェースボックスへ送信するように構成され、
前記第2制御装置と前記車両制御インターフェースボックスとの間の通信には、API(Application Program Interface)で定義されたAPI信号が使用され、
前記API信号は、前記ベース車両に対する指令を示すAPIコマンドと、前記ベース車両の状態を示すAPIステータスとを含み、
前記インターフェースコンピュータは、前記第2制御装置からの前記APIコマンドを前記第1制御装置が実行可能な信号に変換して、変換後の前記信号を前記第1制御装置へ送信するように構成され、
前記インターフェースコンピュータは、前記第1制御装置からの前記車両情報を用いて前記APIステータスを取得し、取得された前記APIステータスを前記第2制御装置へ送信するように構成される、請求項3に記載の車両。
【請求項5】
前記第1コンピュータは、前記動作モード情報をバックアップRAM(Random Access Memory)に記録するように構成される、請求項1~4のいずれか一項に記載の車両。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自動運転可能な車両に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特開2019-177807号公報(特許文献1)には、ルーフトップに自動運転キットが取り付けられた車両が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-177807号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
自動運転可能な車両として、自動モードと手動モードとの両方で動作可能な車両が提案されている。例えば、手動モードで動作中(手動運転中)の車両において、ユーザが必要に応じて自動モード(自動運転)に切り替えられるようにすることが考えられる。こうした車両は、初期状態では手動モードで動作し、ユーザが自動モードに切り替えると、自動モードでの動作を開始する。そのため、車両が自動モードで動作しているときに車両の動作モードを管理するコンピュータが何らかの事情(例えば、コンピュータの内部異常または電源異常)によって一時的に停止すると、コンピュータの再起動によって車両の動作モードが手動モードに戻ってしまい、車両が自動モードでの動作を継続できなくなるという課題が生じ得る。
【0005】
本開示は、上記課題を解決するためになされたものであり、その目的は、車両が自動モードで動作しているときに車両の動作モードを管理するコンピュータが何らかの事情によって一時的に停止した場合に、コンピュータの再起動後に車両が自動モードでの動作を継続できるようにすることである。
【課題を解決するための手段】
【0006】
本開示の一形態に係る車両は、車両プラットフォームと、自動運転のための指令を車両プラットフォームへ送信する自動運転キットとを備える。車両プラットフォームは、第1制御装置を含むベース車両を備える。自動運転キットは、自動運転制御に関する指令を決定する第2制御装置を備える。車両プラットフォームは、第1コンピュータを含む車両制御インターフェースボックスをさらに備える。第1コンピュータは、第1制御装置および第2制御装置の両方と通信可能に構成される。第1コンピュータは、車両プラットフォームが自動運転キットのコントロール下にある自動モードと、当該車両がドライバのコントロール下にある手動モードとを含む選択肢から選ばれた動作モードを検出するとともに、検出された動作モードを示す動作モード情報を記録するように構成される。第1制御装置は、車両制御インターフェースボックスによって検出された動作モードに従って車両を制御するように構成される。第1コンピュータは、再起動時に、停止直前に記録した動作モード情報に基づいて、選ばれた動作モードを検出するように構成される。
【発明の効果】
【0007】
本開示によれば、車両が自動モードで動作しているときに車両の動作モードを管理するコンピュータが何らかの事情によって一時的に停止した場合に、コンピュータの再起動後に車両が自動モードでの動作を継続できるようになる。
【図面の簡単な説明】
【0008】
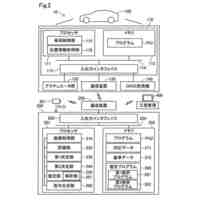
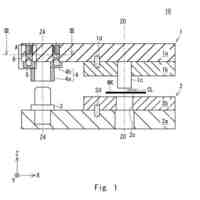
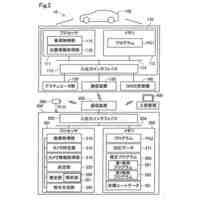
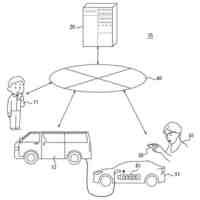
本開示の実施の形態に係る車両の概略構成を示す図である。
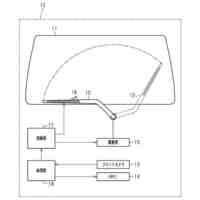
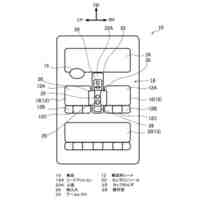
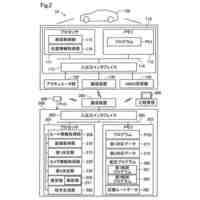
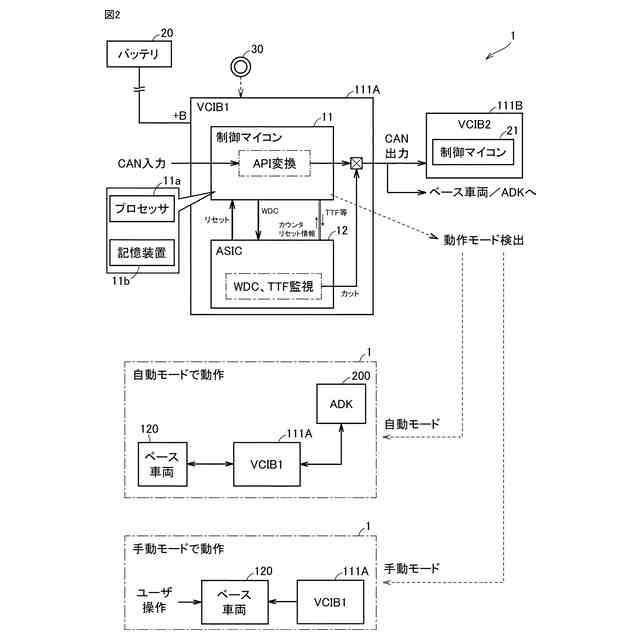
図1に示した車両制御インターフェースボックスの構成および機能について説明するための図である。
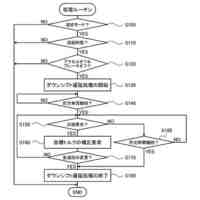
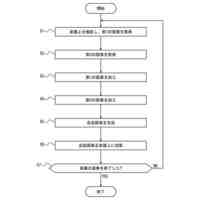
本開示の実施の形態に係る動作モードの管理方法を示すフローチャートである。
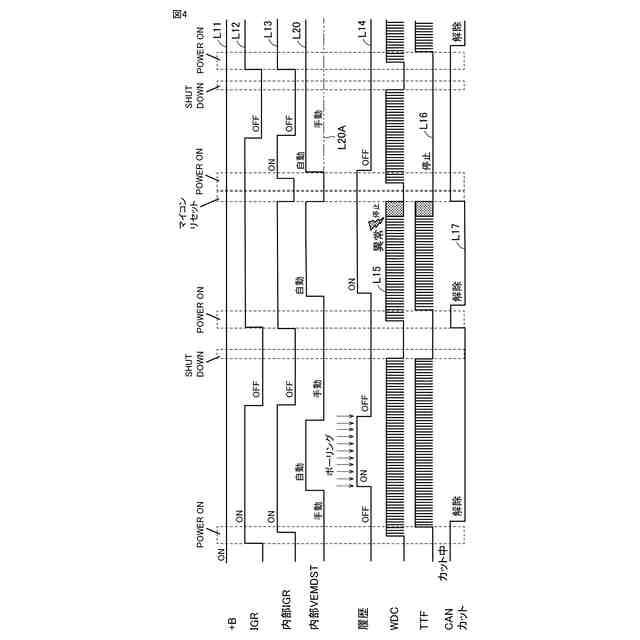
本開示の実施の形態に係る車両の第1動作例を示すタイムチャートである。
本開示の実施の形態に係る車両の第2動作例を示すタイムチャートである。
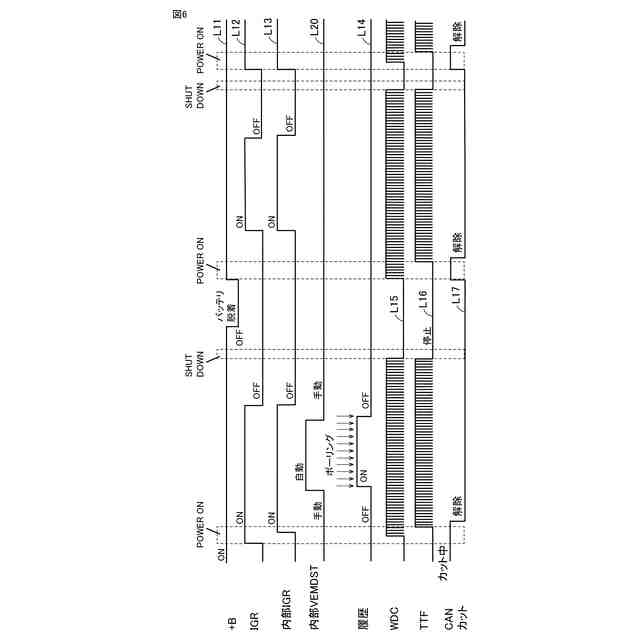
本開示の実施の形態に係る車両の第3動作例を示すタイムチャートである。
【発明を実施するための形態】
【0009】
以下、本開示の実施の形態について、図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰り返さない。
【0010】
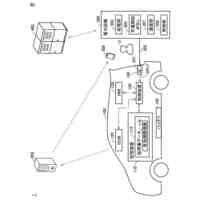
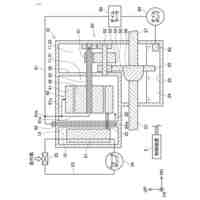
図1は、本開示の実施の形態に係る車両の概略構成を示す図である。図1を参照して、車両1は、VP(車両プラットフォーム)100と、ADK(自動運転キット)200とを備える。VP100は、VCIB(車両制御インターフェースボックス)110と、ベース車両120とを含む。ベース車両120にVCIB110を追加することによって、ADK200が着脱可能なVP100が形成される。そして、VP100に対してADK200を取り付けることによって車両1が完成する。ベース車両120は、例えば市販されるxEV(電動車)である。この実施の形態では、ベース車両120としてBEV(電気自動車)を採用する。ただしこれに限られず、ベース車両120は、BEV以外のxEVであってもよい。この実施の形態では、ベース車両120のルーフトップにADK200が取り付けられる。ただし、ADK200の取り付け位置は適宜変更可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
方法
23日前
トヨタ自動車株式会社
切断装置
1日前
トヨタ自動車株式会社
システム
9日前
トヨタ自動車株式会社
エンジン
1日前
トヨタ自動車株式会社
積層コア
10日前
トヨタ自動車株式会社
二次電池
1日前
トヨタ自動車株式会社
蓄電セル
10日前
トヨタ自動車株式会社
金型装置
9日前
トヨタ自動車株式会社
二次電池
9日前
トヨタ自動車株式会社
駆動装置
10日前
トヨタ自動車株式会社
二次電池
2日前
トヨタ自動車株式会社
電力機器
11日前
トヨタ自動車株式会社
二次電池
2日前
トヨタ自動車株式会社
システム
9日前
トヨタ自動車株式会社
車載隔壁
9日前
トヨタ自動車株式会社
システム
9日前
トヨタ自動車株式会社
制御方法
9日前
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
内燃機関
23日前
トヨタ自動車株式会社
電動車両
1日前
トヨタ自動車株式会社
フロア構造
1日前
トヨタ自動車株式会社
電気自動車
1日前
トヨタ自動車株式会社
サーバ装置
10日前
トヨタ自動車株式会社
電池パック
2日前
トヨタ自動車株式会社
牽引フック
3日前
トヨタ自動車株式会社
車両用架台
11日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ