TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025010593
公報種別
公開特許公報(A)
公開日
2025-01-22
出願番号
2024184959,2020215724
出願日
2024-10-21,2020-12-24
発明の名称
処理設備の監視システム
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
G05B
23/02 20060101AFI20250115BHJP(制御;調整)
要約
【課題】簡単に処理場を監視することができる処理設備の監視システムを提供する。
【解決手段】無人飛行体と、飛行ルート上で無人飛行体を飛行させ、飛行ルート上にある監視ポイントを無人飛行体に巡回させる飛行制御部と、監視ポイントの稼働の状態を検出する検出装置と、監視ポイントの異常の有無を診断する異常診断装置と、を備え、飛行制御部は、無人飛行体の2回目以降の巡回において、少なくとも先の巡回時に得られた監視ポイントにおける異常診断装置の診断結果が異常の可能性あり又は異常ありであった場合、異常の可能性あり又は異常ありとされた監視ポイントには無人飛行体を飛行させずに、該監視ポイントとは異なる監視ポイントを次の飛行先として決定し、無人飛行体を決定した次の飛行先に飛行させる。
【選択図】図3
特許請求の範囲
【請求項1】
無人飛行体と
、
複数の処理場
のそれぞれに設定された監視ポイントを結ぶ飛行ルート上で前記無人
飛行体を飛行させる飛行制御部
であって、前記飛行ルート上にある前記監視ポイントを前記無人飛行体に巡回させる飛行制御部
と、
前記飛行ルート上にある前記監視ポイントの稼働の状態を検出する検出装置と、
前記監視ポイントの異常の有無を診断する異常診断装置と、を備え、
前記異常診断装置は、前記検出装置の検出結果に基づき、前記監視ポイントの異常の可能性又は異常の有無を診断し
、
前記飛行制御部は、
前記無人飛行体を前記飛行ルート上で少なくとも2回巡回させ、
2回目以降の巡回において、少なくとも先の巡回時に得られた前記監視ポイントにおける前記異常診断装置の診断結果が異常の可能性あり又は異常ありであった場合、前記異常の可能性あり又は前記異常ありとされた前記監視ポイントには前記無人飛行体を飛行させずに、該監視ポイントとは異なる監視ポイントを次の飛行先として決定し、前記無人飛行体を決定した前記次の飛行先に飛行させる
処理設備の監視システム。
続きを表示(約 1,200 文字)
【請求項2】
前記飛行制御部は、
2回目以降の巡回において、前記無人飛行体を前記飛行ルート上の前記次の飛行先に飛行させないと判断した場合、先の巡回時に得られた前記監視ポイントにおける前記検出装置の検出結果に基づき、前記飛行ルート上にある前記次の飛行先である前記監視ポイントとは異なる監視ポイントを前記無人飛行体の飛行先として決定し、前記無人
飛行体を
決定した飛行先に
飛行させる請求項1に記載の処理設備の監視システム。
【請求項3】
前記飛行制御部は、
2回目以降の巡回において、先の巡回時に得られた前記監視ポイントにおける前記異常診断装置の診断結果が予め設定された条件を満たした場合に、前記飛行ルート上にある前記次の飛行先である前記監視ポイントに前記無人飛行体を飛行させると判断する請求項1又は
請求項2に記載の処理設備の監視システム。
【請求項4】
前記無人飛行体には、巡回時に取得した前記複数の処理場に設定された前記監視ポイントに対する前記検出装置の検出時刻とともに検出結果を監視情報として記憶する記憶装置が設けられ、
前記飛行制御部は、前記記憶装置に記憶された監視情報に基づき、前記次の飛行先である前記監視ポイントに前記無人飛行体を飛行させるか否かを判断する
請求項1
~請求項3のいずれか1項
に記載の処理設備の監視システム。
【請求項5】
前記飛行制御部は、
2回目以降の巡回において、先の巡回時に前記異常診断装置の診断結果として異常の可能性あり又は異常ありとされた前記監視ポイントが前記次の飛行先である場合、先の巡回時における前記検出装置の検出時刻が、現時点から遡って所定の時間内にある場合には、前記異常の可能性あり又は前記異常ありとされた前記監視ポイントには前記無人飛行体を飛行させずに、該監視ポイントとは異なる監視ポイントを次の飛行先として決定し、前記無人飛行体を決定した前記次の飛行先に飛行させる
請求項
1
~請求項4のいずれか1項に記載の処理設備の監視システム。
【請求項6】
前記飛行制御部は、
2回目以降の巡回において、先の巡回時に前記異常診断装置の診断結果として異常の可能性あり、又は異常ありとされた前記監視ポイントが前記次の飛行先である場合、異常の
可能性あり、又は異常ありとされた先の巡回時における前記検出装置の検出時刻が、現時点から遡って所定の時間を超える場合には、前記無人飛行体を前記異常の可能性あり又は異常ありとされた前記次の飛行先である前記監視ポイント
に飛行させる請求項
5に
記載の処理設備の監視システム。
【請求項7】
前記監視ポイントは、前記処理場に設置された回転駆動する機器である請求項1~6
のいずれか1項に記載の処理設備の監視システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、処理設備の監視システムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
水処理設備には攪拌機、ポンプおよび脱水機等の多くの回転機器が使用されている。上水設備、下水処理設備および工場等における排水処理設備において、回転機器の状態を正確に把握することは重要である。
特許文献1は、被試験装置に設置されたセンサで測定した物理量によって転がり軸受の状態監視を行なう状態監視方法であって、センサによって測定した測定波形のデータに対して高速フーリエ変換を少なくとも1回実行して、変換後波形を生成するステップと、 変換後波形の少なくとも3か所のピークを中心とした、少なくとも3つの特徴量算出範囲における変換後波形の部分波形から第1特徴量を算出するステップと、第1特徴量を用いて、転がり軸受の異常を検出するステップとを備えている。
【先行技術文献】
【特許文献】
【0003】
特開2019-45472号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、被試験装置に設置されたセンサによって回転機器の状態を把握しているが、全ての回転機器にセンサを設けなければならないし、異常の回転機器を探さなければならず、監視が非常に大変であった。
本発明は、上述の問題に鑑みてなされたもので、簡単に処理場を監視することができる処理設備の監視システムを提供することを目的とする。
【課題を解決するための手段】
【0005】
処理設備の監視システムは、
無人飛行体と
、複数の処理場
のそれぞれに設定された監視ポイントを結ぶ飛行ルート上で前記無人
飛行体を飛行させる飛行制御部
であって、前記飛行ルート上にある前記監視ポイントを前記無人飛行体に巡回させる飛行制御部
と、
前記飛行ルート上にある前記監視ポイントの稼働の状態を検出する検出装置と、前記監視ポイントの異常の有無を診断する異常診断装置と、を備え、前記異常診断装置は、前記検出装置の検出結果に基づき、前記監視ポイントの異常の可能性又は異常の有無を診断し
、
前記飛行制御部は、前記無人飛行体を前記飛行ルート上で少なくとも2回巡回させ、2回目以降の巡回において、少なくとも先の巡回時に得られた前記監視ポイントにおける前記異常診断装置の診断結果が異常の可能性あり又は異常ありであった場合、前記異常の可能性あり又は前記異常ありとされた前記監視ポイントには前記無人飛行体を飛行させずに、該監視ポイントとは異なる監視ポイントを次の飛行先として決定し、前記無人飛行体を決定した前記次の飛行先に飛行させる。
【0006】
前記飛行制御部は、
2回目以降の巡回において、前記無人飛行体を前記飛行ルート上の前記次の飛行先に飛行させないと判断した場合、先の巡回時に得られた前記監視ポイントにおける前記検出装置の検出結果に基づき、前記飛行ルート上にある前記次の飛行先である前記監視ポイントとは異なる監視ポイントを前記無人飛行体の飛行先として決定し、前記無人
飛行体を
決定した飛行先に
飛行させる
。
前記飛行制御部は、2回目以降の巡回において、先の巡回時に得られた前記監視ポイントにおける前記異常診断装置の診断結果が予め設定された条件を満たした場合に、前記飛
行ルート上にある前記次の飛行先である前記監視ポイントに前記無人飛行体を飛行させると判断する
。
前記無人飛行体には、巡回時に取得した前記複数の処理場に設定された前記監視ポイントに対する前記検出装置の検出時刻とともに検出結果を監視情報として記憶する記憶装置が設けられ、前記飛行制御部は、前記記憶装置に記憶された監視情報に基づき、前記次の飛行先である前記監視ポイントに前記無人飛行体を飛行させるか否かを判断する
。
【0007】
前記飛行制御部は、2回目以降の巡回において、先の巡回時に前記異常診断装置の診断結果として異常の可能性あり又は異常ありとされた前記監視ポイントが前記次の飛行先である場合、先の巡回時における前記検出装置の検出時刻が、現時点から遡って所定の時間内にある場合には、前記異常の可能性あり又は前記異常ありとされた前記監視ポイントには前記無人飛行体を飛行させずに、該監視ポイントとは異なる監視ポイントを次の飛行先として決定し、前記無人飛行体を決定した前記次の飛行先に前記無人飛行体を飛行させる
。
【0008】
前記飛行制御部は、2回目以降の巡回において、先の巡回時に前記異常診断装置の診断結果として異常の可能性あり、又は異常ありとされた前記監視ポイントが前記次の飛行先である場合、異常の可能性あり、又は異常ありとされた先の巡回時における前記検出装置の検出時刻が、現時点から遡って所定の時間を超える場合には、前記無人飛行体を前記異常の可能性あり又は異常ありとされた前記次の飛行先である前記監視ポイント
に前記無人飛行体
を飛
行させ
る
。
前記監視ポイントは、前記処理場に設置された回転駆動する機器である
。
【発明の効果】
【0009】
本発明によれば、簡単に処理場を監視することができる。
【図面の簡単な説明】
【0010】
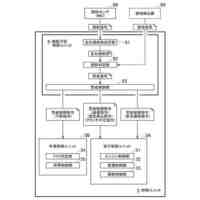
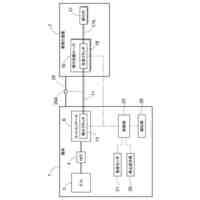
処理設備の監視システムを示す図である。
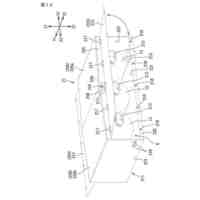
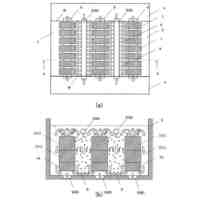
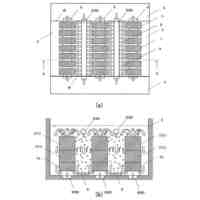
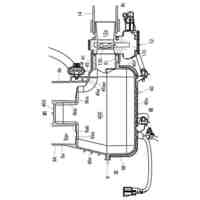
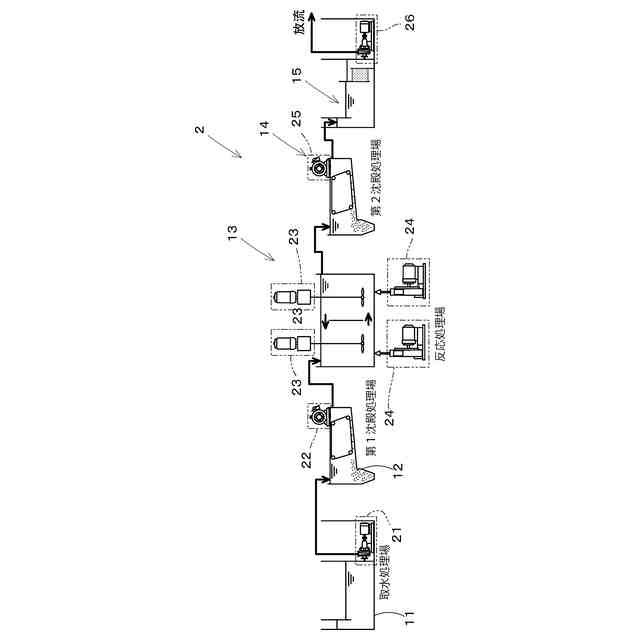
水処理設備の一例を示す図である。
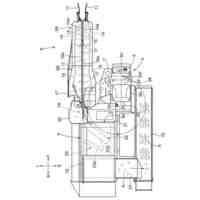
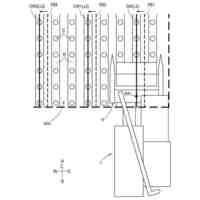
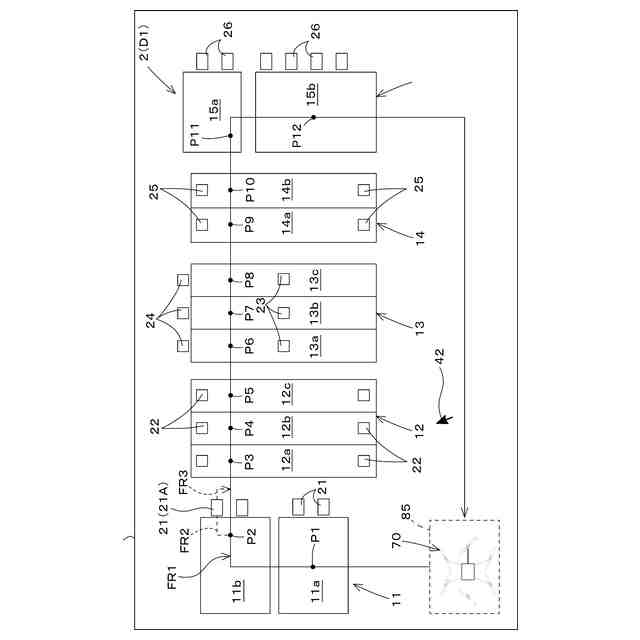
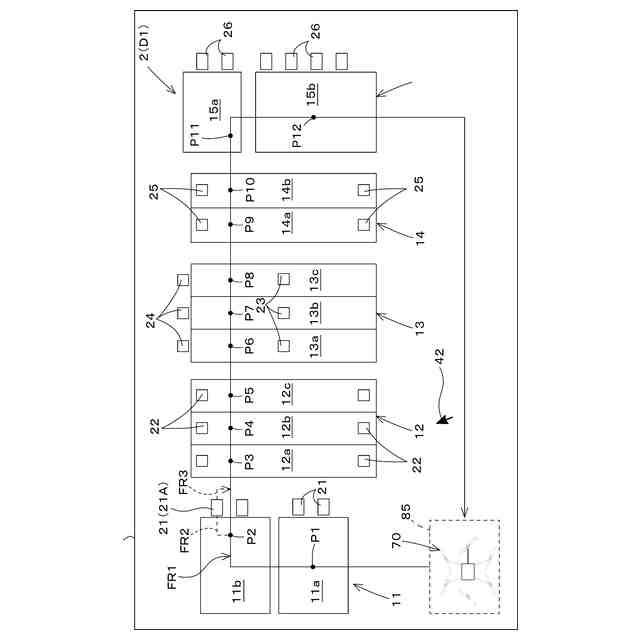
水処理設備及び水処理設備の設備図を上面から見たレイアウトの一例を示す図である。
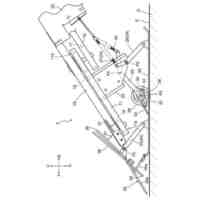
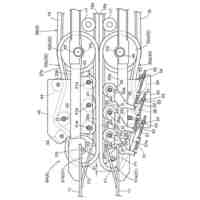
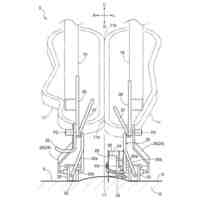
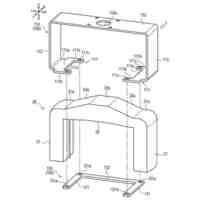
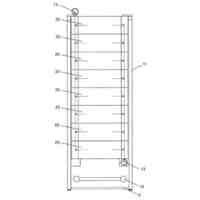
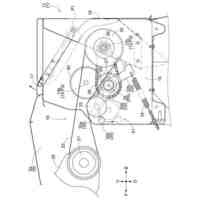
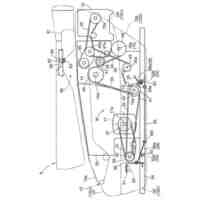
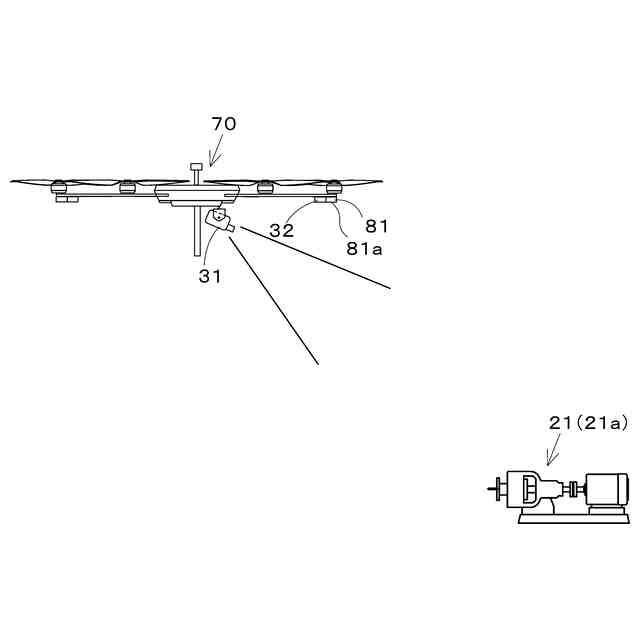
無人飛行体の拡大図である。
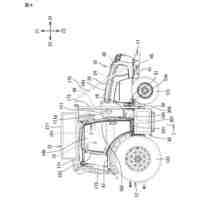
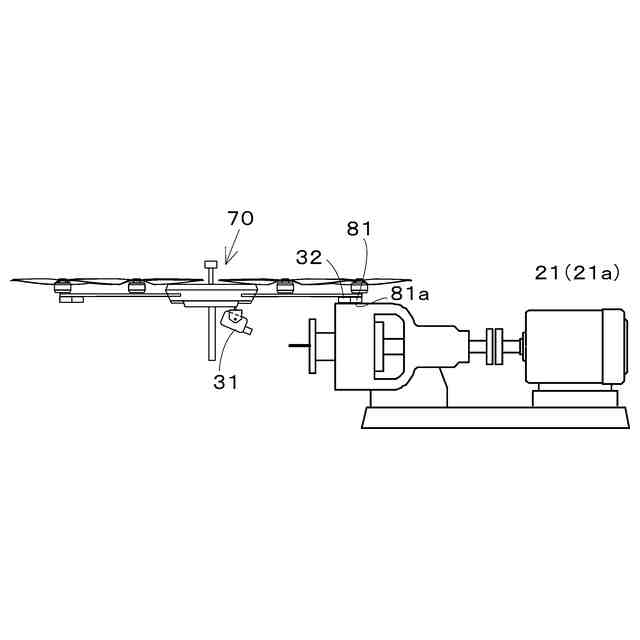
監視ポイントPnにて回転機器に第1検出装置を向けた図である。
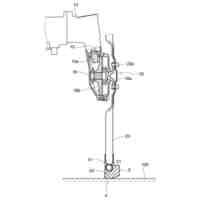
異常候補機器に第2検出装置を近づけた状態を示す図である。
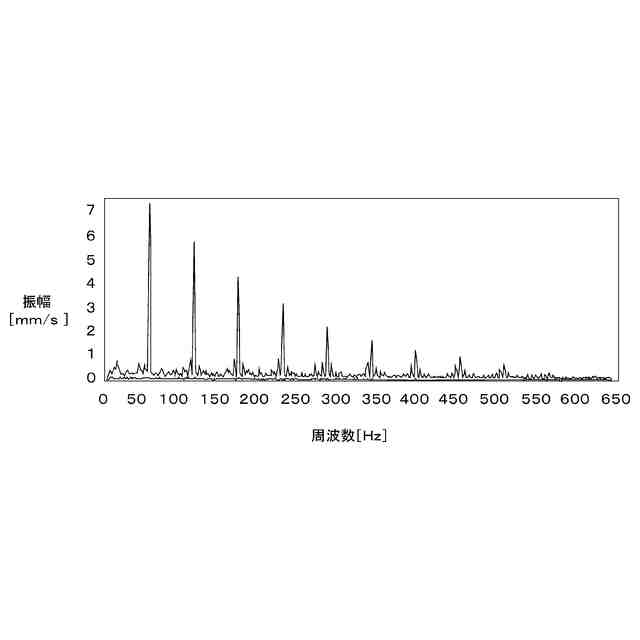
異常候補機器の振動のスペクトルの一例を示す図である。
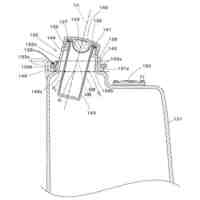
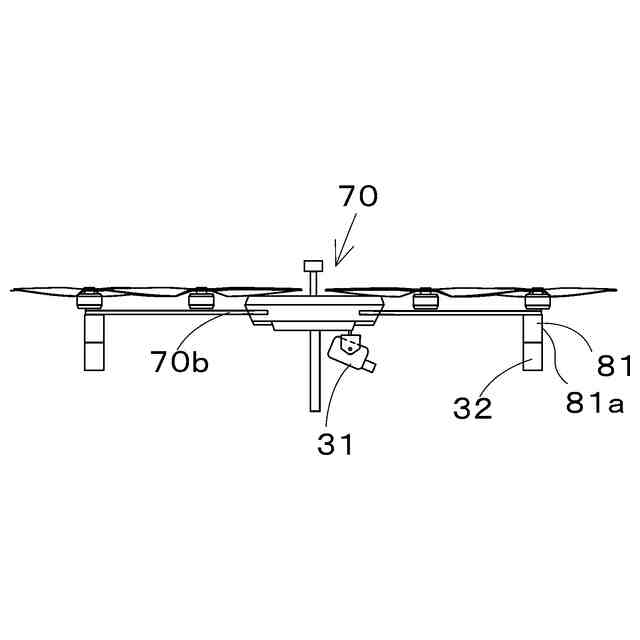
吸着部(電磁石)の吸着面を外側(側方)に向くように取り付けた図である。
吸着部(電磁石)の吸着面を外側(上側)に向くように取り付けた図である。
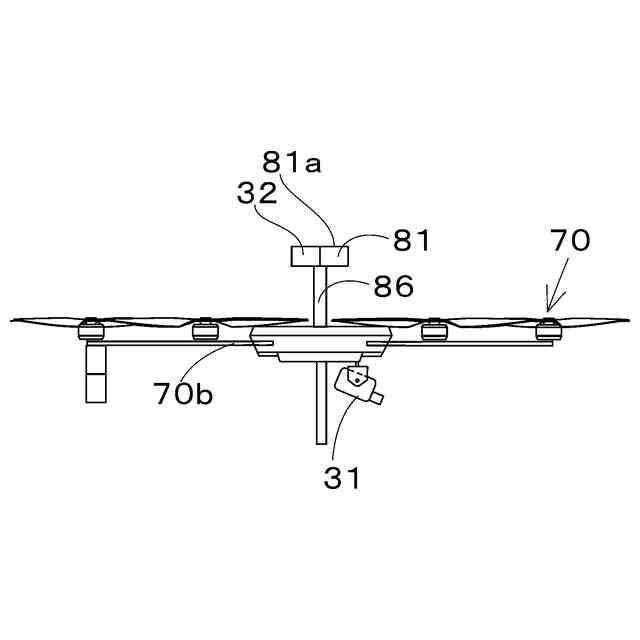
吸着部(電磁石)を下方に突出するステーに取り付けた図である。
無人飛行体の動作フローである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
桝蓋
1か月前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業車
5日前
株式会社クボタケミックス
多層管
27日前
株式会社クボタ
作業機
6日前
株式会社クボタ
作業車
27日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
5日前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業車両
5日前
株式会社クボタ
作業車両
5日前
株式会社クボタケミックス
取付部材
1か月前
株式会社クボタ
システム
7日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
水田作業車
1か月前
株式会社クボタ
水処理装置
15日前
株式会社クボタ
水処理装置
15日前
株式会社クボタ
膜分離装置
28日前
株式会社クボタ
コンバイン
5日前
株式会社クボタ
水田作業車
1か月前
株式会社クボタ
電動作業車
5日前
株式会社クボタ
圃場作業機
1か月前
株式会社クボタ
コンバイン
5日前
株式会社クボタ
走行システム
5日前
株式会社クボタ
水分量測定装置
1か月前
株式会社クボタ
水分量測定装置
1か月前
株式会社クボタ
吸気マニホルド
5日前
株式会社クボタ
弁箱用の消失模型
1か月前
株式会社クボタ
作物検知システム
7日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ