TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025004519
公報種別
公開特許公報(A)
公開日
2025-01-15
出願番号
2023104251
出願日
2023-06-26
発明の名称
システム
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250107BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業車が作業走行するための走行経路を適切なものにする手段を提供する。
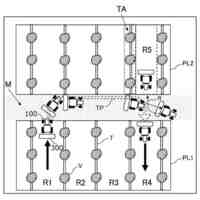
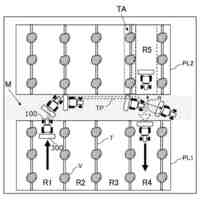
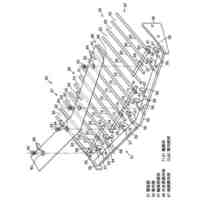
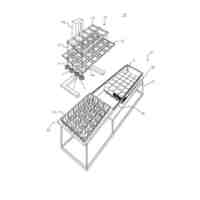
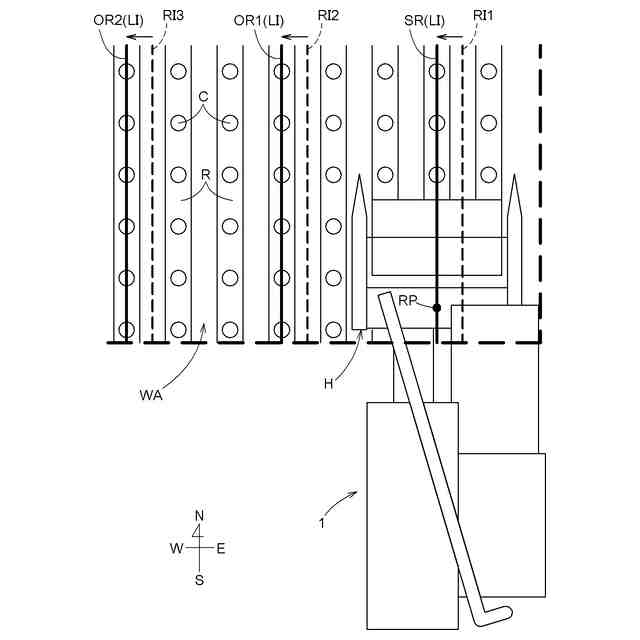
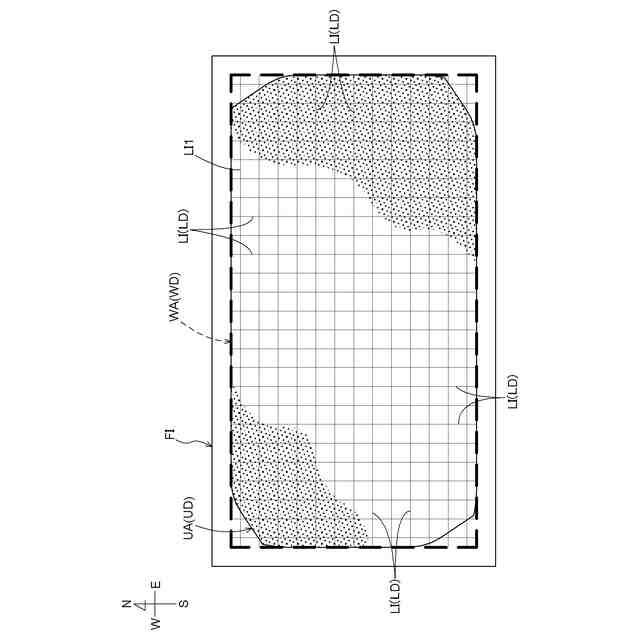
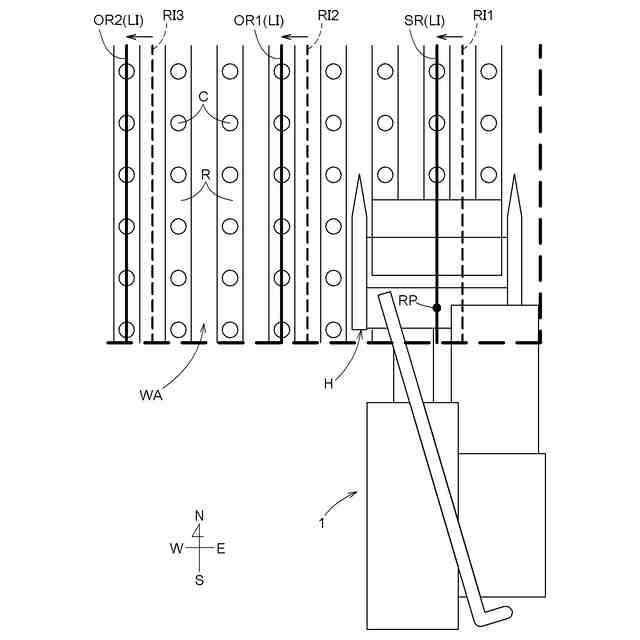
【解決手段】作業車1の走行を管理するシステムであって、作業車1が作業走行するための作業領域WAを取得する作業領域取得部と、停車した作業車1の位置を基準位置RPとして取得する基準位置取得部と、作業車1が作業走行するための走行経路LIを作業領域WAの内部に設定する経路設定部と、を備える。経路設定部は、基準位置RPを通る開始走行経路SR又は延長線が基準位置RPを通る開始走行経路SRを設定すると共に開始走行経路SRに平行な他走行経路OR1、OR2を設定する。
【選択図】図9
特許請求の範囲
【請求項1】
作業車の走行を管理するシステムであって、
前記作業車が作業走行するための作業領域を取得する作業領域取得部と、
停車した前記作業車の位置を基準位置として取得する基準位置取得部と、
前記作業車が作業走行するための走行経路を前記作業領域の内部に設定する経路設定部と、を備え、
前記経路設定部は、前記基準位置を通る開始走行経路又は延長線が前記基準位置を通る開始走行経路を設定すると共に前記開始走行経路に平行な他走行経路を設定するシステム。
続きを表示(約 860 文字)
【請求項2】
前記基準位置取得部は、オペレータが前記作業車を手動走行させて停車させた後に、前記基準位置を取得する請求項1に記載のシステム。
【請求項3】
前記基準位置取得部は、オペレータから人為操作を受け付けたことに応じて、前記基準位置を取得する請求項1に記載のシステム。
【請求項4】
畝間隔を取得する畝間隔取得部と、
前記畝間隔に基づいて前記走行経路の経路間隔を決定する経路間隔決定部と、を備え、
前記経路設定部は、前記経路間隔に基づいて前記他走行経路を設定する請求項1に記載のシステム。
【請求項5】
前記経路設定部は、
前記基準位置の取得の前に、前記作業車が作業走行するための仮走行経路を前記作業領域の内部に設定し、
前記基準位置の取得の後に、前記基準位置を通るようにする前記仮走行経路の補正、又は延長線が前記基準位置を通るようにする前記仮走行経路の補正を実行すると共に、補正された前記仮走行経路を前記開始走行経路として設定する請求項1に記載のシステム。
【請求項6】
前記経路設定部は、前記作業領域の境界線に沿って延びるように前記開始走行経路及び前記他走行経路を設定する請求項1に記載のシステム。
【請求項7】
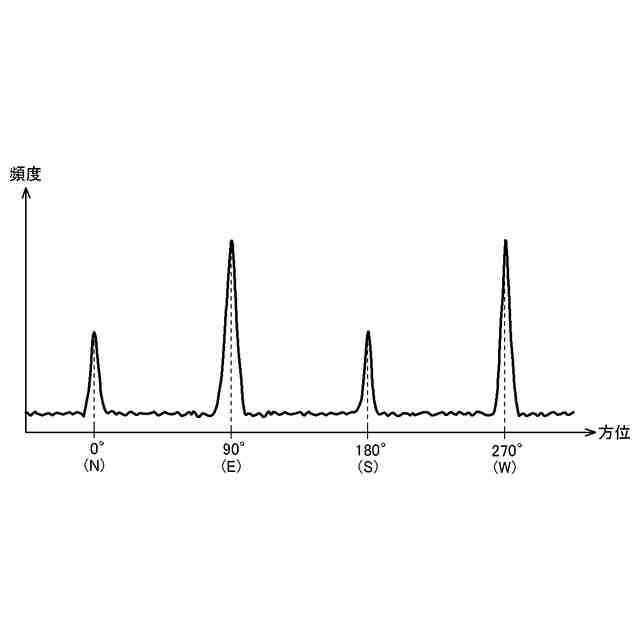
過去に同一の圃場で作業走行した先行作業車の走行基準である先行走行基準を取得する先行走行基準取得部と、
前記先行走行基準に基づいて経路方位を決定する経路方位決定部と、を備え、
前記経路設定部は、前記経路方位に沿って延びるように前記開始走行経路及び前記他走行経路を設定する請求項1に記載のシステム。
【請求項8】
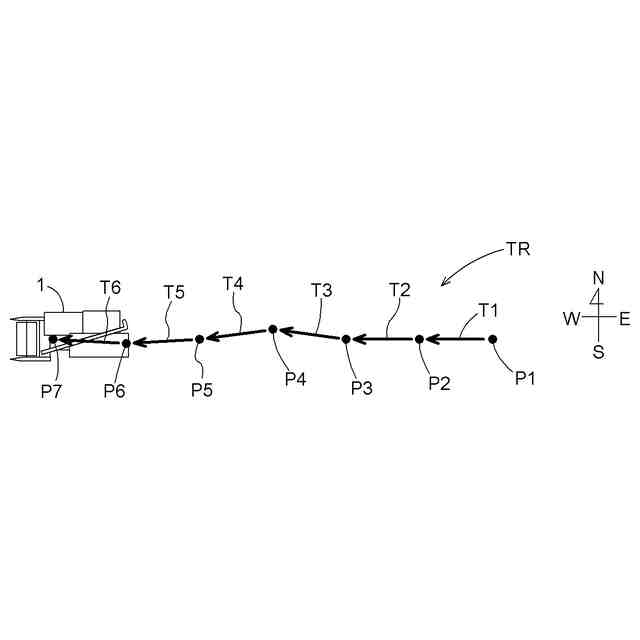
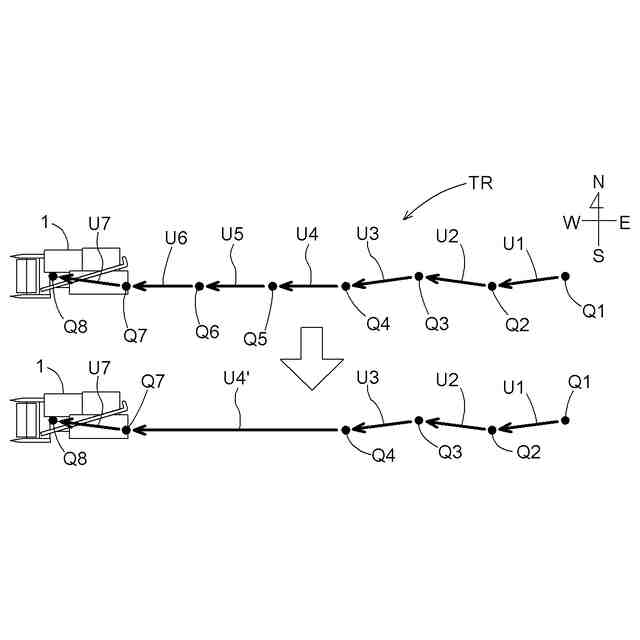
前記作業車が圃場の最外周を走行する最外周走行における前記作業車の走行軌跡を取得する走行軌跡取得部を更に備え、
前記作業領域取得部は、前記走行軌跡に基づいて前記作業領域を生成する請求項1から7のいずれか1項に記載のシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、作業車自動走行システムが開示されている。このシステムでは、作業対象領域を分割する走行経路要素群が設定され、その走行経路要素群が順次選択されて、作業車の自動走行が行われる。
【先行技術文献】
【特許文献】
【0003】
特開2018-038291号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のシステムでは、作業対象領域の辺に対して収穫機の作業幅の半分の距離をあけた位置から、その辺と平行に走行経路要素が設定される。この方式で設定される走行経路は、圃場の作物の位置によっては、最適なものとならない可能性がある。
【0005】
例えば、圃場の作物の列の間隔が大きい場合、作業対象領域の辺と作物の列との間隔が大きくなる可能性がある。この場合に、作業対象領域の辺に対して収穫機の作業幅の半分の距離をあけた位置に走行経路が設定され、その走行経路を収穫機が走行すると、収穫部の端部が作業対象領域の辺の近傍を通る。従って、収穫部に作物が入ってこない領域(作業対象領域の辺と作物の列との空隙に対応)が生じる。すなわち、収穫作業の効率が低下する。
【0006】
本発明の目的は、作業車が作業走行するための走行経路を適切なものにする手段を提供することにある。
【課題を解決するための手段】
【0007】
上述した課題を解決する手段として、本発明のシステムは、作業車の走行を管理するシステムであって、前記作業車が作業走行するための作業領域を取得する作業領域取得部と、停車した前記作業車の位置を基準位置として取得する基準位置取得部と、前記作業車が作業走行するための走行経路を前記作業領域の内部に設定する経路設定部と、を備え、前記経路設定部は、前記基準位置を通る開始走行経路又は延長線が前記基準位置を通る開始走行経路を設定すると共に前記開始走行経路に平行な他走行経路を設定することを特徴とする。
【0008】
上記の特徴によれば、停車した作業車の位置が基準位置として取得され、その基準位置を通る開始走行経路(又は延長線が基準位置を通る開始走行経路)が設定される。すなわち停車位置が、開始走行経路及び他走行経路の位置に反映される。従って、停車位置が適切なものであれば、設定される走行経路が適切なものとなる。例えば、作業対象領域の辺から作物の列が大きく離れている場合に、作物の列の位置に収穫部が合致するように停車すれば、その停車位置を通るように開始走行経路が設定される。そうすると、開始走行経路を収穫機が走行したときに、収穫部の全体に作物が入ってくるので、収穫作業の効率が向上する。
【0009】
本発明において、前記基準位置取得部は、オペレータが前記作業車を手動走行させて停車させた後に、前記基準位置を取得すると好ましい。
【0010】
上記の特徴によれば、オペレータが停車させた位置が基準位置となるので、基準位置が適切なものになりやすい。例えば、作業車の作業装置が適切な位置になるように、オペレータが作業車を手動走行させて停車させる。例えば、圃場の作物の列に収穫部が合致するように、オペレータが作業車を手動走行させて停車させる。そうすると、取得された基準位置が適切なものとなり、設定される走行経路が適切なものとなる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車両
1日前
株式会社クボタ
作業車両
1日前
株式会社クボタ
作業車両
1日前
株式会社クボタ
担体流動槽及び浄化槽
2日前
株式会社クボタ
自律農業車両の旋回制御
1日前
株式会社クボタ
自律農業車両の旋回制御
1日前
株式会社クボタ
トラクタ
1日前
株式会社クボタ
トラクタ
1日前
個人
除草具
26日前
個人
ベアスタンガン
26日前
個人
ペット用玩具
23日前
個人
植裁物への水やり装置
8日前
井関農機株式会社
作業車両
2日前
個人
根掛りしないイカ用疑似餌
26日前
タキイ種苗株式会社
レタス植物
16日前
株式会社大貴
動物用トイレ
1日前
株式会社ロッソ
植物栽培器
12日前
株式会社ロッソ
植物栽培器
12日前
松山株式会社
収穫機
1日前
みのる産業株式会社
移植装置
23日前
三菱マヒンドラ農機株式会社
作業車両
2日前
個人
ルアー
16日前
三菱マヒンドラ農機株式会社
作業車両
1日前
株式会社東海化成
ポット保持具
22日前
井関農機株式会社
コンバイン
8日前
株式会社クボタ
作業機
9日前
AGRIST株式会社
収穫装置
19日前
株式会社BARKS
ペット収容袋付衣類
9日前
日本製紙クレシア株式会社
ペット用吸収性物品
9日前
株式会社クボタケミックス
弁装置
23日前
井関農機株式会社
植物工場の生産流通システム
1日前
大日本除蟲菊株式会社
薬剤揮散装置
16日前
グローブライド株式会社
釣竿ケース
15日前
株式会社ササキコーポレーション
農作業機
23日前
株式会社シマノ
ルアー
26日前
株式会社吉野工業所
除虫用餌剤容器
2日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ