TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025022817
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2024124661
出願日
2024-07-31
発明の名称
自律農業車両の旋回制御
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
A01B
69/00 20060101AFI20250206BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
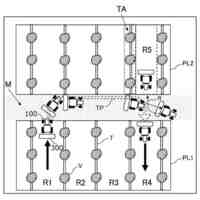
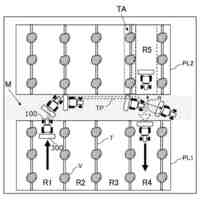
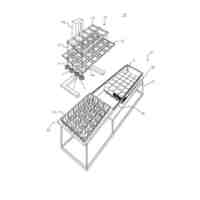
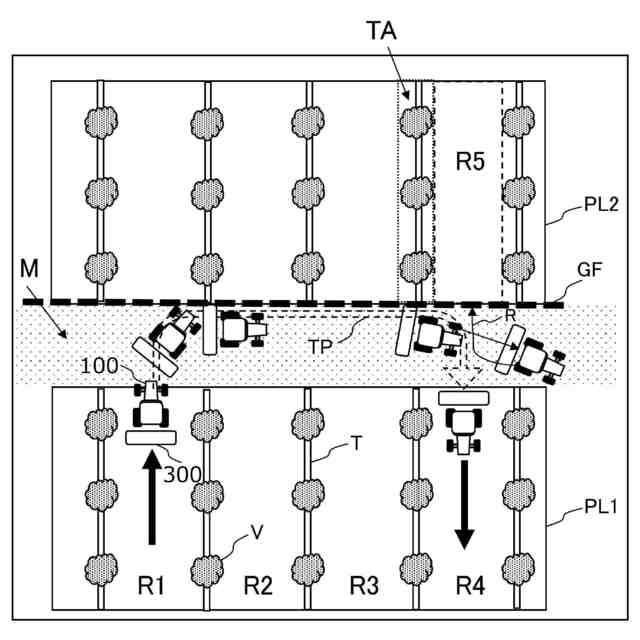
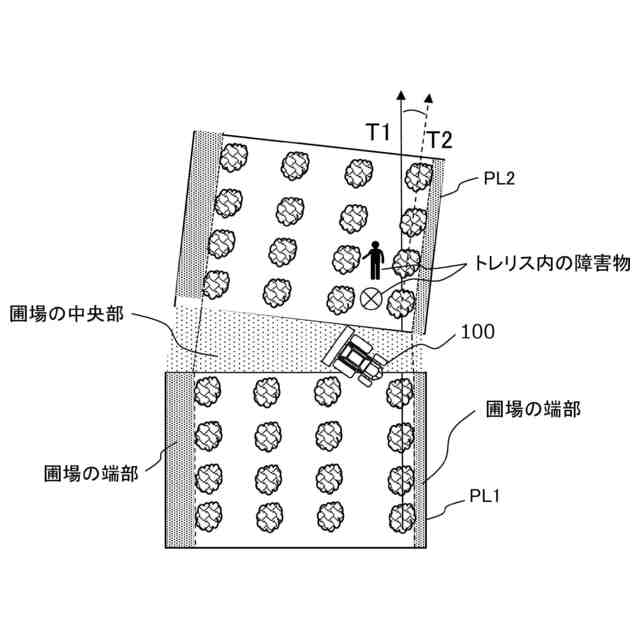
【課題】自律走行車が旋回してトレリス間の列に入る際に、自律走行車の効率的な旋回制御を実現するシステムおよび方法を提供する。
【解決手段】自律車両ナビゲーションシステムは、コントローラを備え、このコントローラは、作業車両に関する情報を受信し、ユーザが入力したデータを受信し、作業車両が第1区画を走行し、退出し、第1区画と第2区画の間のマージン領域を走行し、第1区画の第2列に入る前に旋回操作処理を実行するように作業車両を制御する。コントローラは、作業車両が旋回操作処理を実行するときに、少なくとも1つのセンサから検出された情報および/または端末装置でユーザから入力された入力データに基づく条件が満たされているか否かのコントローラの判定に基づき、作業車両が後退して作業車両の少なくとも一部が隣接領域または第2区画の複数の列に含まれる第3列に進入することを許容する。
【選択図】図1A
特許請求の範囲
【請求項1】
自動運転が可能な作業車両のための自律車両ナビゲーションシステムであって、
コントローラを備え、
前記コントローラは、
少なくとも1つのセンサによって検出され、前記作業車両の位置または前記作業車両の周囲状況に関する情報を受信し、
ユーザが端末装置で入力した入力データを受信し、
前記作業車両が複数の列を含む第1区画を走行し、
前記作業車両が前記第1区画に含まれる前記複数の列のうちの第1列から前記第1区画を退出し、
前記作業車両が前記第1区画と複数の列を含む隣接領域または第2区画との間に設けられたマージン領域を走行し、前記マージン領域は前記第1区画と前記隣接領域または前記第2区画との間にあって、前記隣接領域または前記第2区画は前記第1区画とは離間し、
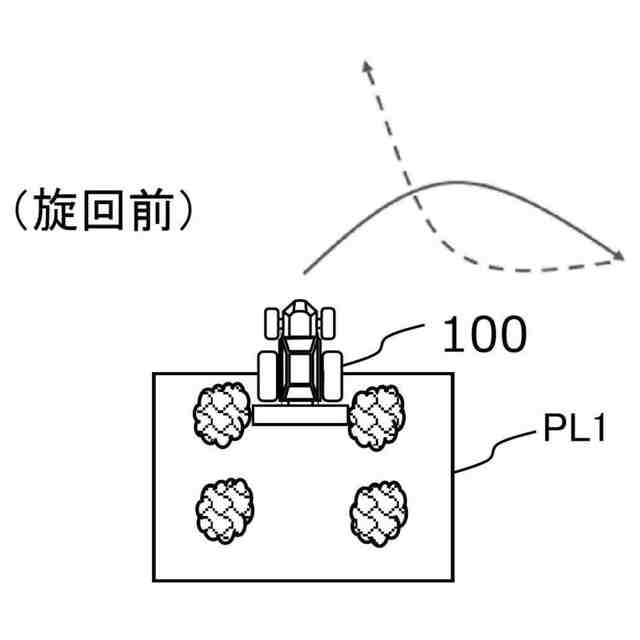
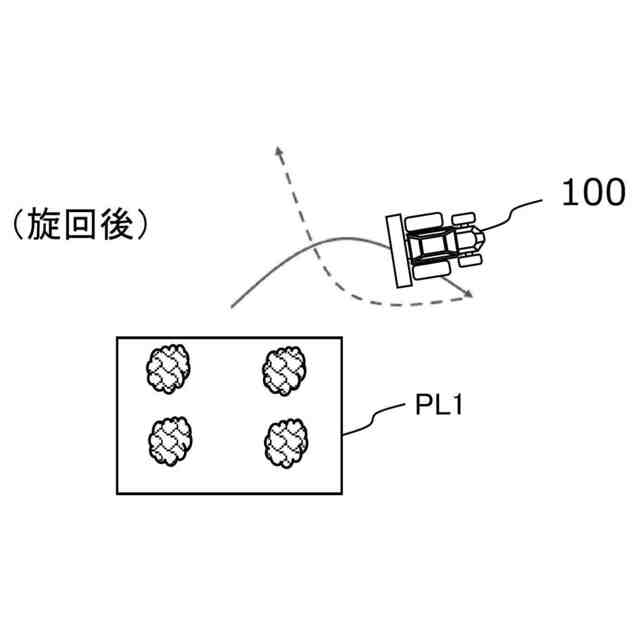
前記作業車両が前記第1区画の前記複数の列のうちの第2列に入る前に、旋回操作処理を実行するように前記作業車両を制御し、
前記コントローラは、前記作業車両が前記旋回操作処理を実行しているときに、前記少なくとも1つのセンサから検出された前記情報および/または前記端末装置でユーザから入力された前記入力データに基づき少なくとも1つ以上の条件が満たされているか否かの前記コントローラによる判定に基づいて、前記作業車両の少なくとも一部が後退して前記隣接領域または前記第2区画の複数の列に含まれる第3列に進入することを許容するように構成またはプログラムされている自律車両ナビゲーションシステム。
続きを表示(約 1,800 文字)
【請求項2】
前記コントローラは、前記少なくとも1つ以上の条件が満たされていないと判定した場合、前記マージン領域と前記隣接領域または前記第2区画との間にジオフェンスを設定するように構成またはプログラムされている請求項1に記載の自律車両ナビゲーションシステム。
【請求項3】
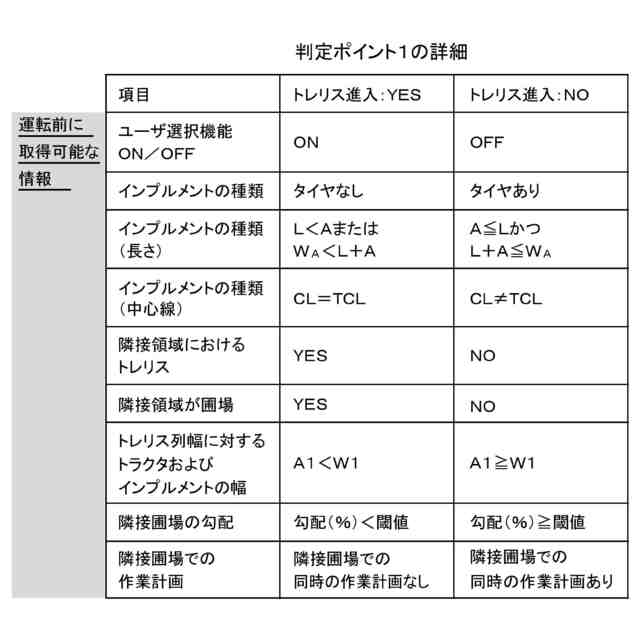
前記端末装置でユーザから入力された前記入力データは、ONまたはOFFに設定されたユーザ選択機能を含み、
前記作業車両が後退して前記第3列に進入することを許容する前記少なくとも1つ以上の条件は、前記ユーザ選択機能に基づく請求項1に記載の自律車両ナビゲーションシステム。
【請求項4】
前記端末装置でユーザから入力された前記入力データは、前記作業車両に取り付けられたインプルメントが1つ以上のタイヤを含むか否かを示す旨を含み、
前記作業車両が後退して前記第3列に進入することを許容する前記少なくとも1つ以上の条件は、前記作業車両に取り付けられた前記インプルメントが1つ以上のタイヤを含むか否かに依存し、
前記インプルメントが1つ以上のタイヤを含む場合、前記作業車両が後退して前記第3列に進入することが許可されず、
前記インプルメントが1つ以上のタイヤを含まない場合、前記作業車両が後退して前記第3列に進入することが許可される請求項1に記載の自律車両ナビゲーションシステム。
【請求項5】
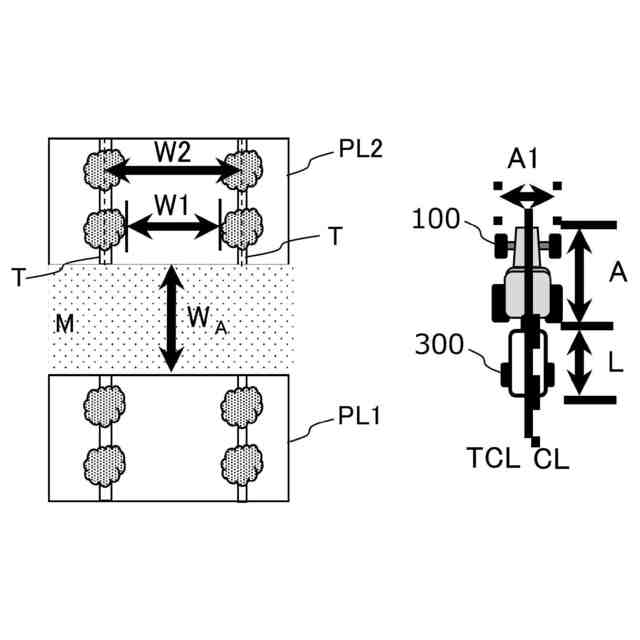
前記端末装置でユーザから入力された前記入力データは、前記作業車両の長さ(A)と、前記作業車両に取り付けられたインプルメントの長さ(L)と、前記マージン領域の幅(W
A
)とを含み、
前記作業車両が後退して前記第3列に進入することを許容する前記少なくとも1つ以上の条件は、前記長さ(A)、前記長さ(L)、および前記幅(W
A
)とに依存し、
条件式(L<A)および条件式(W
A
<L+A)のいずれか一方が満たされている場合、前記作業車両が後退して前記第3列に進入することが許可される請求項1に記載の自律車両ナビゲーションシステム。
【請求項6】
前記端末装置でユーザから入力された前記入力データは、前記作業車両に取り付けられたインプルメントの中心線の位置を規定するCLと、前記作業車両の中心線の位置を規定するTCLとを含み、
前記作業車両が後退して前記第3列に進入することを許容する前記少なくとも1つ以上の条件は、前記CLおよび前記TCLに依存し、前記CLが前記TCLに等しいか、実質的に等しい場合、前記作業車両が後退して前記第3列に進入することが許可される請求項1に記載の自律車両ナビゲーションシステム。
【請求項7】
前記端末装置でユーザから入力された前記入力データは、前記隣接領域または前記第2区画にトレリスがあるか否かを示す旨を含み、
前記トレリスが前記隣接領域または前記第2区画にある場合、前記作業車両が後退して前記第3列に進入することが許可される請求項1に記載の自律車両ナビゲーションシステム。
【請求項8】
前記端末装置でユーザから入力された前記入力データは、前記隣接領域が圃場であるか否かを示す旨を含み、
前記隣接領域が圃場である場合、前記作業車両が後退して前記第3列に進入することが許可される請求項1に記載の自律車両ナビゲーションシステム。
【請求項9】
前記端末装置でユーザから入力された前記入力データは、トレリス列幅を規定するW1と、前記作業車両および前記作業車両に取り付けられたインプルメントの合計幅を規定するA1とを含み、
前記合計幅A1が前記トレリス列幅W1より小さい場合(A1<W1)、前記作業車両が後退して前記第3列に進入することが許可される請求項1に記載の自律車両ナビゲーションシステム。
【請求項10】
前記隣接領域は、隣接圃場であり、
前記端末装置でユーザから入力された前記入力データ、または前記少なくとも1つのセンサによって検出された前記情報は、前記第2区画または前記隣接圃場の勾配を含み、
前記勾配が所定値より小さい場合、前記作業車両が後退して前記第2区画または前記隣接圃場の前記第3列に進入することが許可される請求項1に記載の自律車両ナビゲーションシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
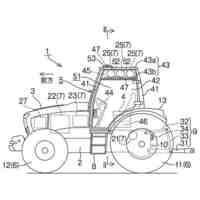
本発明は、本発明は、トラクタ等の自律農作業車両が旋回してトレリス間の列に入る際の旋回制御システムおよび旋回制御方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
圃場で使用される農業機械の自動化に対する研究および開発されてきた。例えば、GNSS(Global Navigation Satellite System)等の測位システムを利用して、圃場内を自動走行するトラクタ、コンバイン、田植機等の作業車両が実用化されつつある。
【0003】
米国特許出願公開第2023/0015153号には、計画走行ラインに応じて自律走行する農業機械が開示されている。計画走行ラインは、車体(車両本体)を直進させる直進部と、車体を旋回させる旋回部とを含むものであってもよい。自律走行コントローラは、車体の走行および操舵を制御してラインアライメント(直線位置決め)を行うように構成されている。ラインアライメントにおいて、自律走行コントローラは、車体を前進させた後、車体を後退させることによってKターン(切り返し転回)を行うように構成されている。ラインアライメントにおいて、自律走行コントローラは、Kターンを複数回実行し、Kターンの実行回数が所定回数以上になった場合に自律走行を開始するように構成またはプログラムされている。
【先行技術文献】
【特許文献】
【0004】
米国特許出願公開第2023/0015153号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、車両が旋回してトレリス間の列に入る際に走行ルートのスペースが制限されている状況において、特に、インプルメントまたは作業ツールが車両またはトラクタに取り付けられている場合、車両が旋回してトレリス間の列に入るために複数回の旋回動作または複数回の後退動作を行うことが必要となる場合がある。したがって、旋回してトレリス間のスペースまたは列に入る際に、旋回制御中に領域の境界を画定し、車両が旋回操作中に特定の領域を利用することができるか否かを判断できる自律走行トラクタシステムが必要とされている。
【課題を解決するための手段】
【0006】
本発明の好適な実施形態は、旋回してトレリス間の列に入る際に自律走行農業車両の旋回制御を行い、旋回制御中に領域の境界を画定する新規な技術、システムおよび方法を提供する。
【0007】
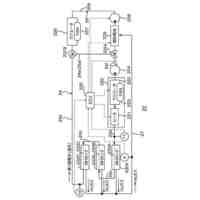
本発明の好適な実施形態によれば、自動運転が可能な作業車両のための自律車両ナビゲーションシステムであって、コントローラを備える。前記コントローラは、少なくとも1つのセンサによって検出され、前記作業車両の位置または前記作業車両の周囲状況に関する情報を受信し、ユーザが端末装置で入力した入力データを受信する。前記コントローラは、前記作業車両が複数の列を含む第1区画を走行し、前記作業車両が前記第1区画に含まれる前記複数の列のうちの第1列から前記第1区画を退出し、前記作業車両が前記第1区画と複数の列を含む隣接領域または第2区画との間に設けられたマージン領域を走行し、前記マージン領域は前記第1区画と前記隣接領域または前記第2区画との間にあって、前記隣接領域または前記第2区画は前記第1区画とは離間し、前記作業車両が前記第1区画の前記複数の列のうちの第2列に入る前に、旋回操作処理を実行するように前記作業車両を制御する。前記コントローラは、前記作業車両が前記旋回操作処理を実行しているときに、前記少なくとも1つのセンサから検出された前記情報および/または前記端末装置でユーザから入力された前記入力データに基づき前記少なくとも1つ以上の条件が満たされているか否かの前記コントローラによる判定に基づいて、前記作業車両の少なくとも一部が後退して前記隣接領域または前記第2区画の複数の列に含まれる第3列に進入することを許容するように構成またはプログラムされている。
【0008】
本発明の好適な実施形態によれば、前記コントローラは、前記少なくとも1つ以上の条件が満たされていないと判定した場合、前記マージン領域と前記隣接領域または前記第2区画との間にジオフェンスを設定するように構成またはプログラムされている
本発明の好適な実施形態によれば、前記端末装置でユーザから入力された前記入力データは、ONまたはOFFに設定されたユーザ選択機能を含み、前記作業車両が後退して前記第3列に進入することを許容する前記少なくとも1つ以上の条件は、前記ユーザ選択機能に基づいている。
【0009】
本発明の好適な実施形態によれば、前記端末装置でユーザから入力された前記入力データは、前記作業車両に取り付けられたインプルメントが1つ以上のタイヤを含むか否かを示す旨を含み、前記作業車両が後退して前記第3列に進入することを許容する前記少なくとも1つ以上の条件は、前記作業車両に取り付けられた前記インプルメントが1つ以上のタイヤを含むか否かに依存している。前記インプルメントが1つ以上のタイヤを含む場合、前記作業車両が後退して前記第3列に進入することが許可されず、前記インプルメントが1つ以上のタイヤを含まない場合、前記作業車両が後退して前記第3列に進入することが許可される。
【0010】
本発明の好適な実施形態によれば、前記端末装置でユーザから入力された前記入力データは、前記作業車両の長さ(A)と、前記作業車両に取り付けられたインプルメントの長さ(L)と、前記マージン領域の幅(W
A
)とを含み、前記作業車両が後退して前記第3列に進入することを許容する前記少なくとも1つ以上の条件は、前記長さ(A)、前記長さ(L)、および前記幅(W
A
)とに依存し、条件式(L<A)および条件式(W
A
<L+A)のいずれか一方が満たされている場合、前記作業車両が後退して前記第3列に進入することが許可される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車両
1日前
株式会社クボタ
作業車両
1日前
株式会社クボタ
作業車両
1日前
株式会社クボタ
担体流動槽及び浄化槽
2日前
株式会社クボタ
自律農業車両の旋回制御
1日前
株式会社クボタ
自律農業車両の旋回制御
1日前
株式会社クボタ
トラクタ
1日前
株式会社クボタ
トラクタ
1日前
個人
ペット用玩具
23日前
個人
植裁物への水やり装置
8日前
井関農機株式会社
作業車両
2日前
個人
根掛りしないイカ用疑似餌
26日前
タキイ種苗株式会社
レタス植物
16日前
松山株式会社
収穫機
1日前
株式会社ロッソ
植物栽培器
12日前
株式会社ロッソ
植物栽培器
12日前
株式会社大貴
動物用トイレ
1日前
みのる産業株式会社
移植装置
23日前
三菱マヒンドラ農機株式会社
作業車両
2日前
三菱マヒンドラ農機株式会社
作業車両
1日前
個人
ルアー
16日前
株式会社東海化成
ポット保持具
22日前
井関農機株式会社
コンバイン
8日前
株式会社クボタ
作業機
9日前
AGRIST株式会社
収穫装置
19日前
株式会社クボタケミックス
弁装置
23日前
日本製紙クレシア株式会社
ペット用吸収性物品
9日前
井関農機株式会社
植物工場の生産流通システム
1日前
株式会社BARKS
ペット収容袋付衣類
9日前
株式会社吉野工業所
除虫用餌剤容器
2日前
グローブライド株式会社
釣竿ケース
15日前
大日本除蟲菊株式会社
薬剤揮散装置
16日前
株式会社ササキコーポレーション
農作業機
23日前
株式会社大貴
排泄物処理材及びその製造方法
16日前
株式会社デンソー
潅水システム
22日前
南京大学
藻類バイオフィルムの高速成膜方法
26日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ