TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025007752
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023109359
出願日
2023-07-03
発明の名称
移動体、移動体制御装置及び移動体制御方法
出願人
KDDI株式会社
代理人
弁理士法人創光国際特許事務所
,
個人
,
個人
,
個人
主分類
G05D
1/00 20240101AFI20250109BHJP(制御;調整)
要約
【課題】オペレータの操縦によらず、水中を移動できる移動体が水中の所定の場所まで移動できるようにする。
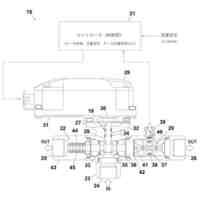
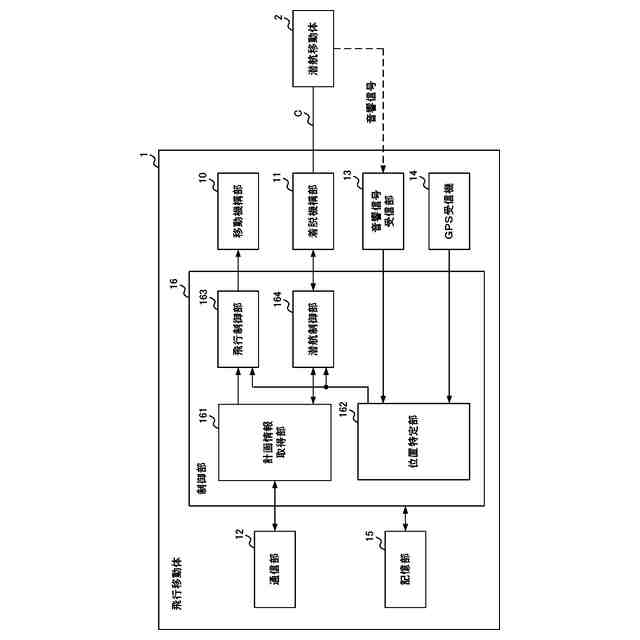
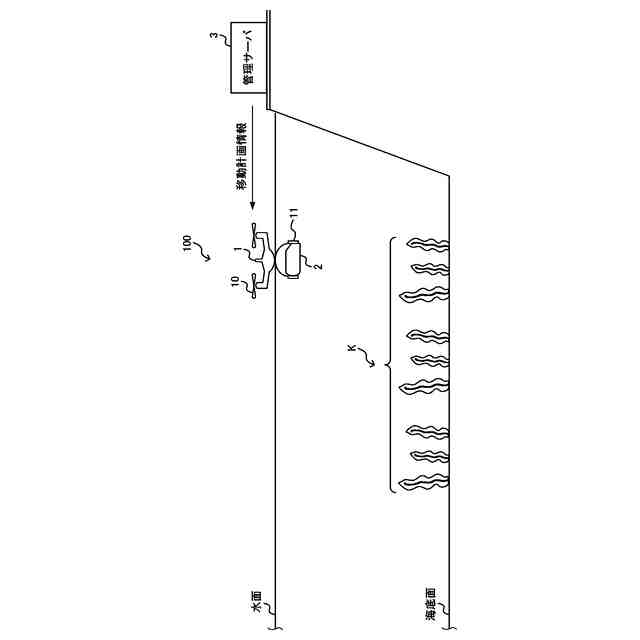
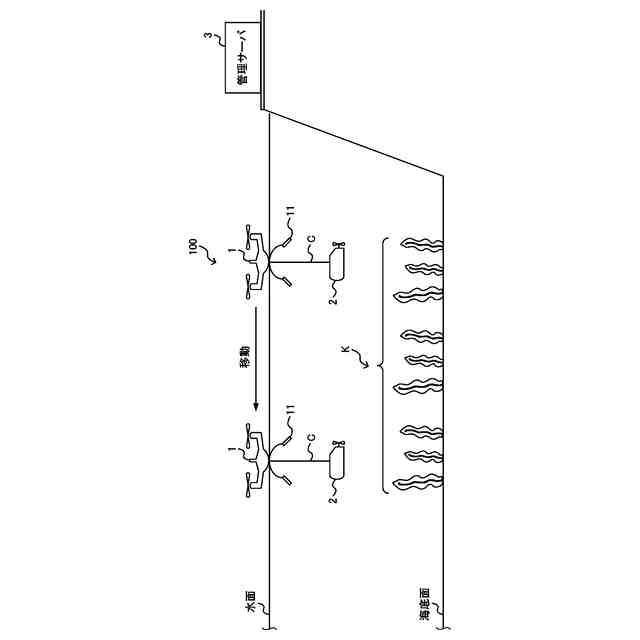
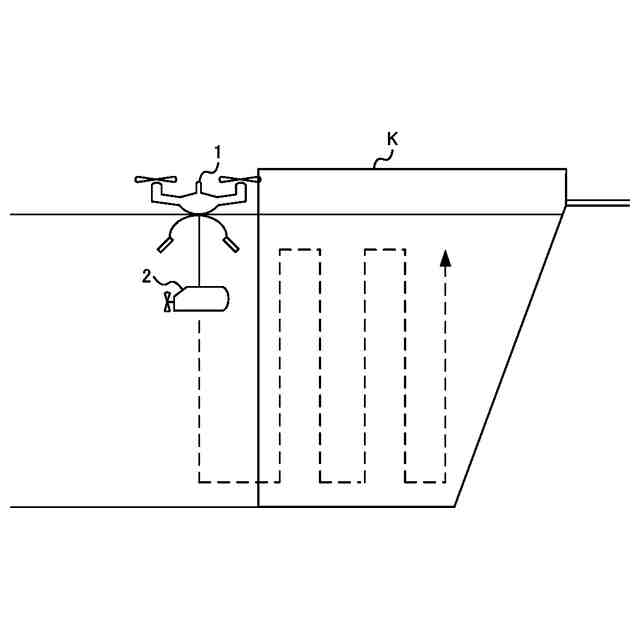
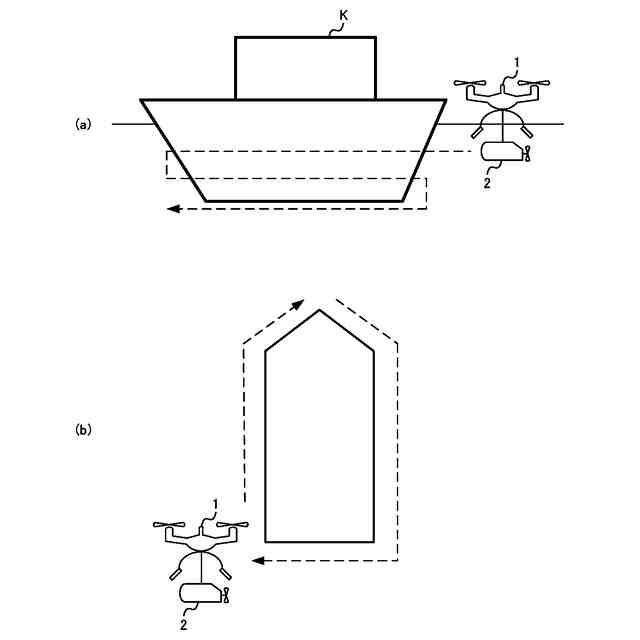
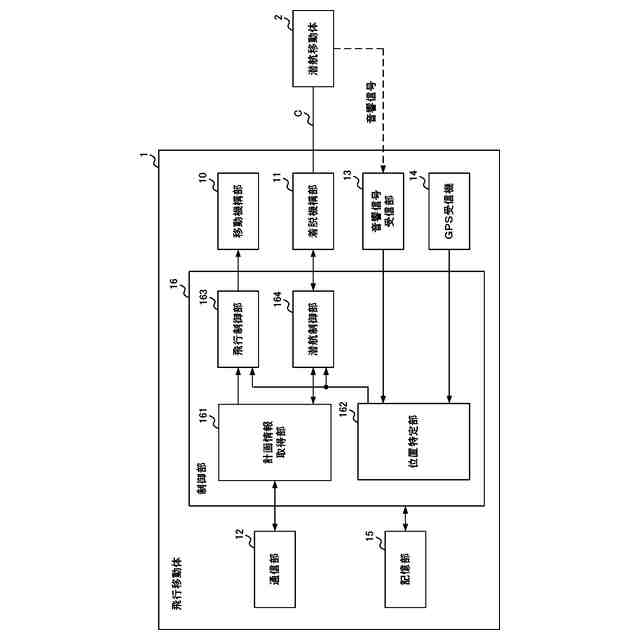
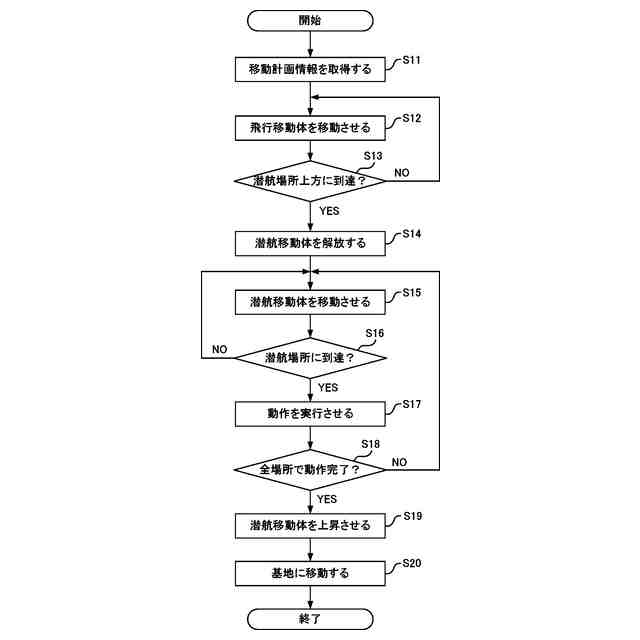
【解決手段】移動体100は、空中を飛行する飛行移動体1と、水中を潜航する潜航移動体2とが着脱可能な状態で結合されている移動体である。飛行移動体1は、潜航移動体2の潜航場所を含む移動計画情報を取得する計画情報取得部161と、潜航場所の上方の位置に向けて飛行移動体1を飛行させる飛行制御部163と、潜航場所の上方の位置に飛行移動体1が到着すると、潜航移動体2を潜航場所に向けて移動させる潜航制御部164と、を有する。
【選択図】図6
特許請求の範囲
【請求項1】
空中を飛行する飛行移動体と、水中を潜航する潜航移動体とが着脱可能な状態で結合されている移動体であって、
前記飛行移動体は、
前記潜航移動体の潜航場所を含む移動計画情報を取得する計画情報取得部と、
前記潜航場所の上方の位置に向けて前記飛行移動体を飛行させる飛行制御部と、
前記潜航場所の上方の位置に前記飛行移動体が到着すると、前記潜航移動体を前記潜航場所に向けて移動させる潜航制御部と、
を有する移動体。
続きを表示(約 1,100 文字)
【請求項2】
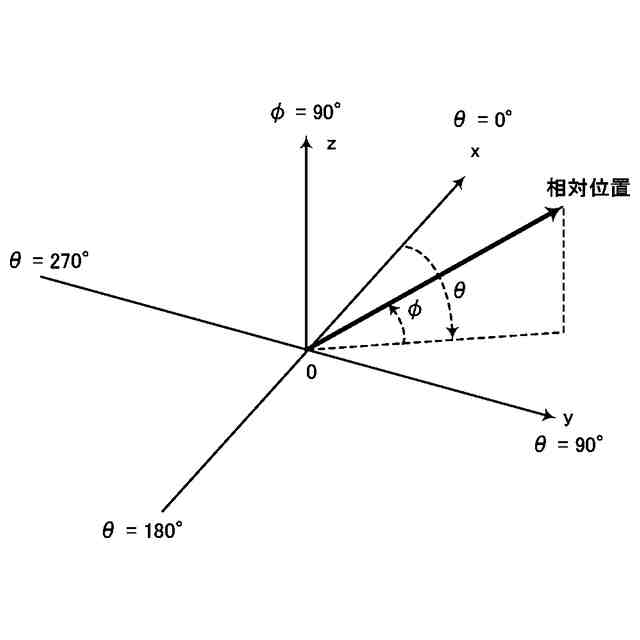
前記飛行移動体は、前記飛行移動体の絶対位置と、当該絶対位置から前記潜航場所までの相対位置と、を特定する位置特定部をさらに有し、
前記潜航制御部は、前記相対位置を含む制御データを前記潜航移動体に送信することにより、前記潜航移動体を前記潜航場所に移動させる、
請求項1に記載の移動体。
【請求項3】
前記潜航制御部は、前記潜航場所の上方の位置において前記位置特定部が前記絶対位置を特定できない場合、前記位置特定部が前記絶対位置を特定した直近の位置から前記潜航場所に向けて前記潜航移動体を移動させる、
請求項2に記載の移動体。
【請求項4】
前記飛行制御部は、前記潜航移動体の位置の鉛直方向の上方に位置するように前記飛行移動体を制御する、
請求項1に記載の移動体。
【請求項5】
前記移動計画情報には、前記潜航場所に関連付けて前記潜航移動体に実行させる動作を示す情報が含まれており、
前記潜航制御部は、前記移動計画情報が示す動作を前記潜航移動体に実行させるための制御データを前記潜航移動体に送信する、
請求項1に記載の移動体。
【請求項6】
前記潜航移動体は、前記潜航移動体の位置及び向きに関連付けて、前記潜航移動体が実行した動作の結果を示す結果データを前記飛行移動体に送信するデータ送信部を有する、
請求項1に記載の移動体。
【請求項7】
前記潜航制御部は、所定の条件を満たす前記結果データを取得した場合に、前記潜航移動体を上昇させる、
請求項6に記載の移動体。
【請求項8】
前記移動計画情報に複数の前記潜航場所が含まれており、
前記飛行制御部は、複数の前記潜航場所のうちの第1潜航場所で前記潜航移動体が所定の動作を完了したことを示す動作完了データを取得した場合に、前記第1潜航場所と異なる第2潜航場所の上方の位置に向けて前記飛行移動体を移動させる、
請求項1に記載の移動体。
【請求項9】
前記潜航制御部は、前記第1潜航場所と前記第2潜航場所との間において、前記飛行移動体の位置に対して鉛直方向の下方の位置に前記潜航移動体を移動させることにより、前記第2潜航場所まで前記潜航移動体を移動させる、
請求項8に記載の移動体。
【請求項10】
前記潜航制御部は、複数の前記潜航場所の全ての場所において前記動作完了データを取得した場合に、前記潜航移動体を上昇させる、
請求項8に記載の移動体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、水中で動作が可能な移動体、当該移動体を制御する移動体制御装置及び当該移動体を移動させるための移動体制御方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
空中を飛行可能な水上ドローンが、水中で動作可能な潜航ドローンと結合された状態で所定の位置まで移動した後に潜航ドローンを分離し、潜航ドローンの作業終了後に潜航ドローンを回収する水空合体ドローンが知られている(例えば、非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0003】
KDDI株式会社,株式会社KDDI総合研究所,株式会社プロドローン,“世界初の水空合体ドローン、遠隔での水中撮影に成功~船を出さずに洋上風力発電設備の安全・効率的な点検を実施~”,[online],2021年12月14日,KDDI,[令和4年2月25日検索],インターネット <URL:https://news.kddi.com/kddi/corporate/newsrelease/2021/12/14/5593.html>
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の水空合体ドローンを動作させるためには、オペレータが水空合体ドローンを目視しながら、又は水空合体ドローンが撮影した画像を見ながら、操縦装置を用いて水空合体ドローンを操縦する必要があった。
【0005】
そこで、本発明はこれらの点に鑑みてなされたものであり、オペレータの操縦によらず、水中を移動できる移動体が水中の所定の場所まで移動できるようにすることを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の態様の移動体は、空中を飛行する飛行移動体と、水中を潜航する潜航移動体とが着脱可能な状態で結合されている移動体であって、前記飛行移動体は、前記潜航移動体の潜航場所を含む移動計画情報を取得する計画情報取得部と、前記潜航場所の上方の位置に向けて前記飛行移動体を飛行させる飛行制御部と、前記潜航場所の上方の位置に前記飛行移動体が到着すると、前記潜航移動体を前記潜航場所に向けて移動させる潜航制御部と、を有する。
【0007】
前記飛行移動体は、前記飛行移動体の絶対位置と、当該絶対位置から前記潜航場所までの相対位置と、を特定する位置特定部をさらに有し、前記潜航制御部は、前記相対位置を含む制御データを前記潜航移動体に送信することにより、前記潜航移動体を前記潜航場所に移動させてもよい。
【0008】
前記潜航制御部は、前記潜航場所の上方の位置において前記位置特定部が前記絶対位置を特定できない場合、前記位置特定部が前記絶対位置を特定した直近の位置から前記潜航場所に向けて前記潜航移動体を移動させてもよい。
【0009】
前記飛行制御部は、前記潜航移動体の位置の鉛直方向の上方に位置するように前記飛行移動体を制御してもよい。
【0010】
前記移動計画情報には、前記潜航場所に関連付けて前記潜航移動体に実行させる動作を示す情報が含まれており、前記潜航制御部は、前記移動計画情報が示す動作を前記潜航移動体に実行させるための制御データを前記潜航移動体に送信してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
1か月前
村田機械株式会社
産業機械
1か月前
アズビル株式会社
制御装置
25日前
株式会社ダイヘン
移動体
2か月前
株式会社ダイヘン
移動体
2か月前
神港テクノス株式会社
制御装置
2か月前
コフロック株式会社
流量制御装置
26日前
トヨタ自動車株式会社
自律移動体
1か月前
株式会社丸和製作所
入力機器
25日前
トヨタ自動車株式会社
配送システム
2か月前
株式会社クボタ
作業車
1か月前
株式会社フジキン
流量制御装置
25日前
アズビル株式会社
パラメータ調整装置
1か月前
株式会社フジキン
流体制御装置
2か月前
株式会社明電舎
車両
1か月前
株式会社豊田自動織機
荷役車両
18日前
株式会社村田製作所
温度補償回路
1か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
トヨタ自動車株式会社
ロボットシステム
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社シンテックホズミ
搬送ロボット
7日前
株式会社ダイフク
物品搬送設備
1か月前
ローム株式会社
電源回路
2か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
11日前
株式会社ダイフク
物品搬送設備
1か月前
キヤノン株式会社
情報処理装置
1か月前
株式会社ダイフク
物品搬送設備
2か月前
ローム株式会社
電源回路
2か月前
旭精機工業株式会社
監視データ処理装置
1か月前
村田機械株式会社
搬送車システム
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
26日前
トヨタ自動車株式会社
群制御システム及び方法
2か月前
東フロコーポレーション株式会社
流量制御装置
2か月前
ブラザー工業株式会社
数値制御装置及び工作機械
1か月前
株式会社ダイフク
情報表示システム
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ