TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025007437
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023108828
出願日
2023-06-30
発明の名称
ステージの回転中心測定方法
出願人
JUKI株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
H05K
13/00 20060101AFI20250109BHJP(他に分類されない電気技術)
要約
【課題】3次元実装装置に使用されるステージの回転中心の位置を正確に測定すること。
【解決手段】3次元実装装置に使用され、実装基板を支持した状態で回転可能なステージの回転中心測定方法は、治具基板が支持された前記ステージを、複数の角度のそれぞれに回転させることと、複数の角度のそれぞれにおいて、治具基板の表面の一部の部位の位置を検出することと、部位の位置の検出結果に基づいて、3次元実装装置に規定された機械座標系の原点に対するステージの回転中心の位置を算出することと、を含む。
【選択図】図11
特許請求の範囲
【請求項1】
3次元実装装置に使用され、実装基板を支持した状態で回転可能なステージの回転中心測定方法であって、
治具基板が支持された前記ステージを、複数の角度のそれぞれに回転させることと、
複数の前記角度のそれぞれにおいて、前記治具基板の表面の一部の部位の位置を検出することと、
前記部位の位置の検出結果に基づいて、前記3次元実装装置に規定された機械座標系の原点に対する前記ステージの回転中心の位置を算出することと、を含む、
ステージの回転中心測定方法。
続きを表示(約 1,300 文字)
【請求項2】
前記ステージは、回転軸を中心に回転可能であり、
前記部位の位置を検出することは、前記回転軸に直交する所定面における前記部位の位置を検出することである、
請求項1に記載のステージの回転中心測定方法。
【請求項3】
前記部位の位置は、前記機械座標系の原点からの横方向の距離を示す横方向の位置と、前記原点からの高さ方向の距離を示す高さ方向の位置と、を含む、
請求項2に記載のステージの回転中心測定方法。
【請求項4】
前記部位にマークが設けられ、
前記3次元実装装置は、前記マークを撮像する基板カメラと、前記マークの高さを検出する高さセンサと、を有し、
前記基板カメラ及び前記高さセンサのそれぞれの検出データに基づいて、前記部位の位置が算出される、
請求項3に記載のステージの回転中心測定方法。
【請求項5】
前記治具基板の相互に異なる少なくとも3つの角度のそれぞれにおいて、前記マークが検出され、
3つの前記マークの位置に基づいて、前記所定面における前記回転軸の位置が前記回転中心として算出される、
請求項4に記載のステージの回転中心測定方法。
【請求項6】
前記3次元実装装置は、前記部位の高さを検出する高さセンサを有し、
前記高さセンサの検出データに基づいて、前記部位の位置が算出される、
請求項3に記載のステージの回転中心測定方法。
【請求項7】
前記治具基板の相互に異なる少なくとも2つの角度のそれぞれにおいて、前記治具基板の表面の第1部位および第2部位が検出され、
4つの前記部位の位置に基づいて、前記所定面における前記回転軸の位置が前記回転中心として算出される、
請求項6に記載のステージの回転中心測定方法。
【請求項8】
3次元実装装置に使用され、実装基板を支持した状態で回転可能なステージの回転中心測定方法であって、
前記ステージを、複数の角度のそれぞれに回転させることと、
複数の前記角度のそれぞれにおいて、前記ステージの表面の一部の部位の位置を検出することと、
前記部位の位置の検出結果に基づいて、前記3次元実装装置に規定された機械座標系の原点に対する前記ステージの回転中心の位置を算出することと、を含む、
ステージの回転中心測定方法。
【請求項9】
前記ステージは、回転軸を中心に回転可能であり、
前記部位の位置を検出することは、前記回転軸に直交する所定面における前記部位の位置を検出することである、
請求項8に記載のステージの回転中心測定方法。
【請求項10】
前記部位の位置は、前記機械座標系の原点からの横方向の距離を示す横方向の位置と、前記原点からの高さ方向の距離を示す高さ方向の位置と、を含む、
請求項9に記載のステージの回転中心測定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、3次元実装装置に使用されるステージの回転中心測定方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
実装装置に係る技術分野において、特許文献1に開示されているような、立体基板に部品を実装する3次元実装装置が知られている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2018/207313号
【発明の概要】
【発明が解決しようとする課題】
【0004】
3次元実装装置は、揺動可能なステージ(揺動ユニット)を有する。3次元実装装置は、立体基板(実装基板)の表面における部品の実装位置を水平に保つようにステージで立体基板を傾けながら部品を実装するため、ステージの回転角を加味したXYZ位置に実装ヘッドを移動させて部品を実装する。そのため、ステージの回転角から実装位置のXYZ移動量を計算し実装位置のXYZ位置に足しこんで補正するが、ステージの回転中心の位置を設計位置として算出したのでは、XYZ位置に誤差を伴い正確な実装位置の決定ができない可能性がある。そのため、ステージの回転中心の位置を正確に求める手段が必要とされる。
【0005】
本明細書で開示する技術は、3次元実装装置に使用されるステージの回転中心の位置を正確に測定することを目的とする。
【課題を解決するための手段】
【0006】
本明細書で開示する技術に従えば、3次元実装装置に使用され、実装基板を支持した状態で回転可能なステージの回転中心測定方法であって、治具基板が支持されたステージを、複数の角度のそれぞれに回転させることと、複数の角度のそれぞれにおいて、治具基板の表面の一部の部位の位置を検出することと、部位の位置の検出結果に基づいて、3次元実装装置に規定された機械座標系の原点に対するステージの回転中心の位置を算出することと、を含む、ステージの回転中心測定方法が提供される。
【発明の効果】
【0007】
本明細書で開示する技術によれば、3次元実装装置におけるステージの回転中心の位置が正確に求められる。
【図面の簡単な説明】
【0008】
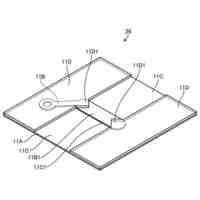
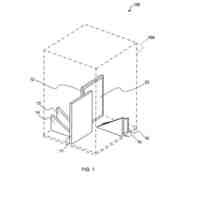
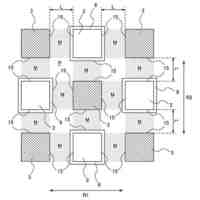
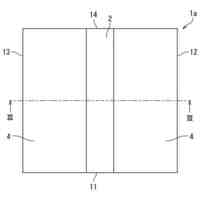
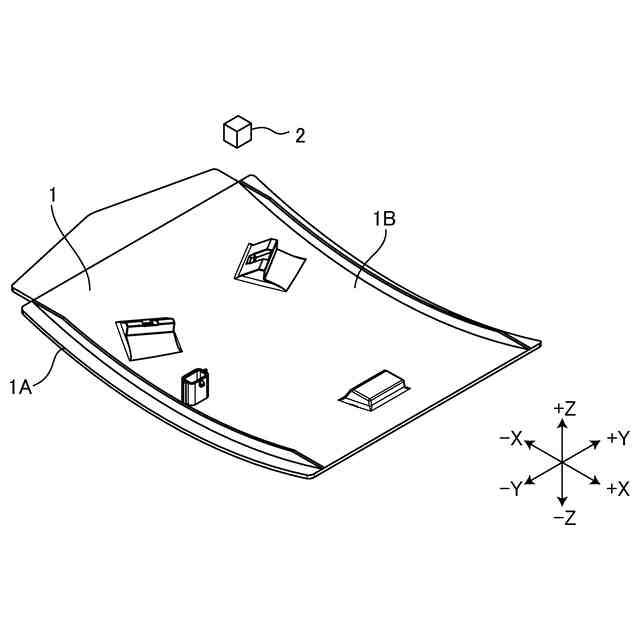
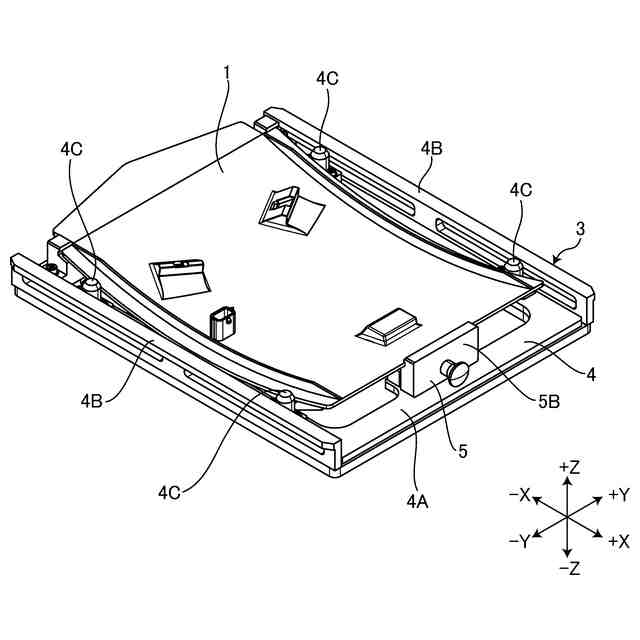
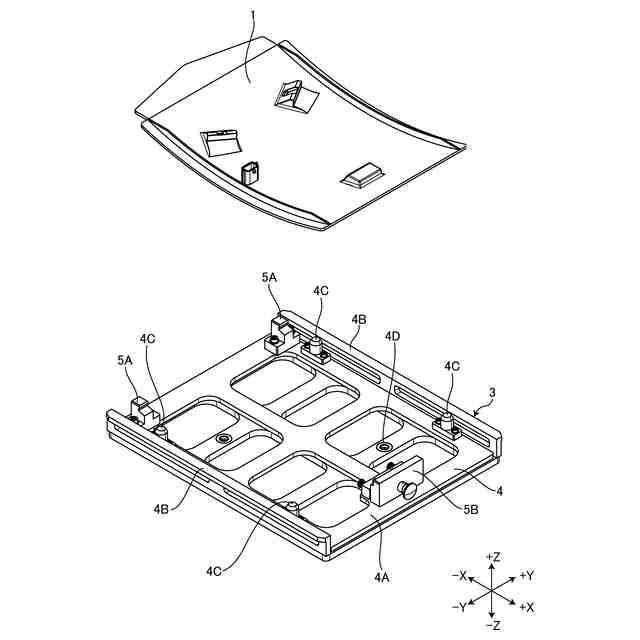
図1は、第1実施形態に係る基板及び部品を示す斜視図である。
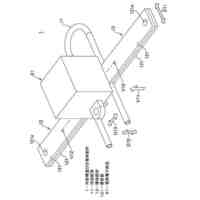
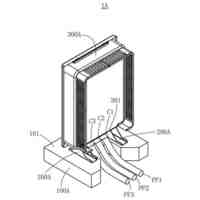
図2は、第1実施形態に係る基板を保持するパレットを示す斜視図である。
図3は、第1実施形態に係る基板及びパレットを示す分解斜視図である。
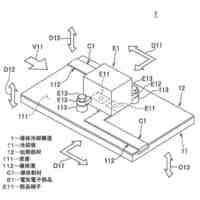
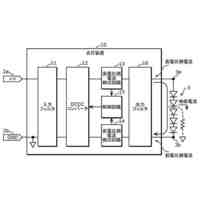
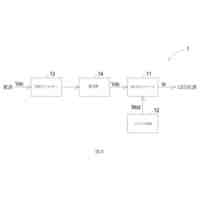
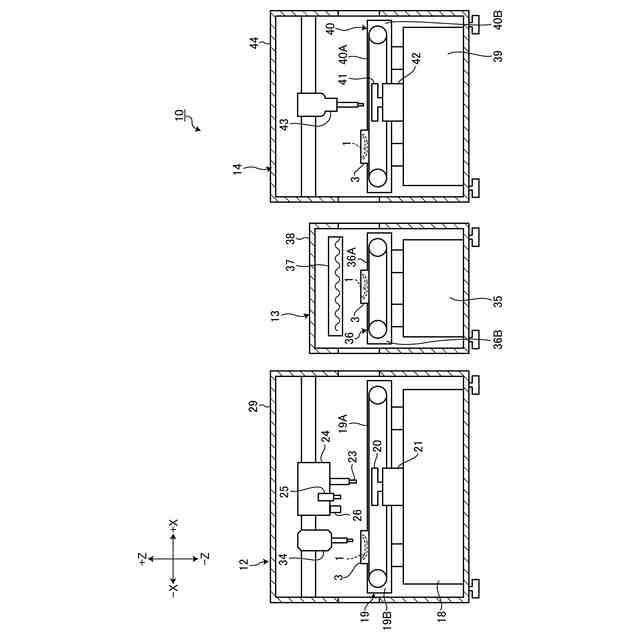
図4は、第1実施形態に係る電子デバイスの生産システムを模式的に示す図である。
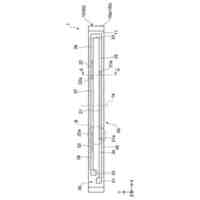
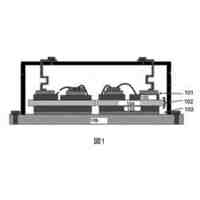
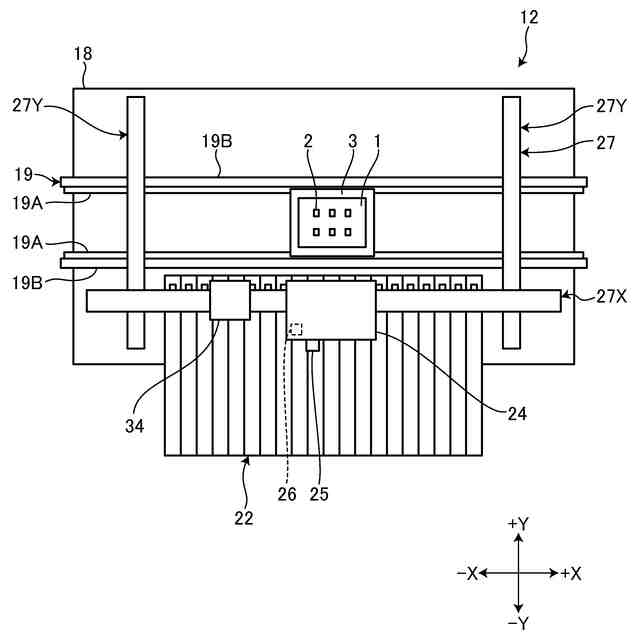
図5は、第1実施形態に係る実装装置を模式的に示す平面図である。
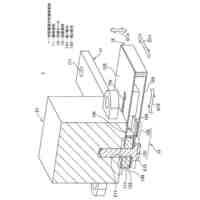
図6は、第1実施形態に係るパレット及びステージを示す斜視図である。
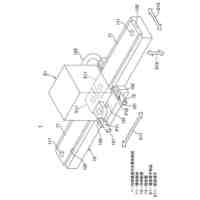
図7は、第1実施形態に係るパレット及びステージを示す分解斜視図である。
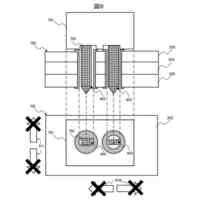
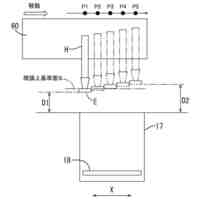
図8は、第1実施形態に係る実装ヘッドを模式的に示す図である。
図9は、第1実施形態に係る基板データ及びNCデータを説明するための図である。
図10は、第1実施形態に係る基板データ及びNCデータを説明するための図である。
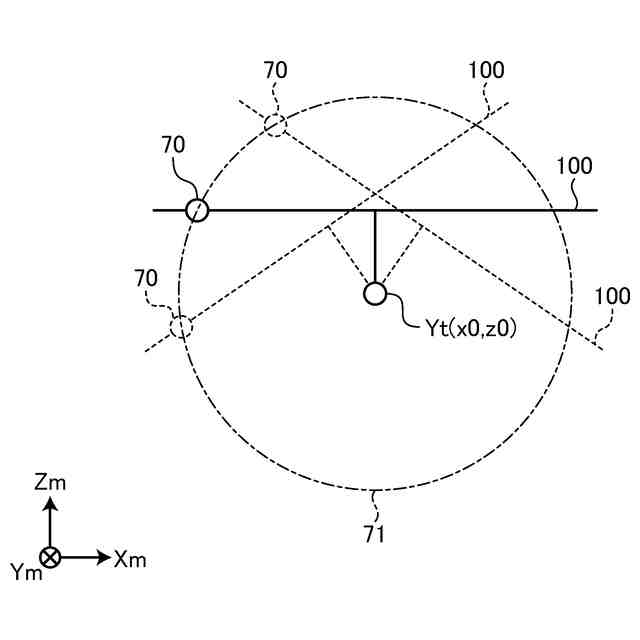
図11は、第1実施形態に係るステージの回転中心測定方法を説明するための図である。
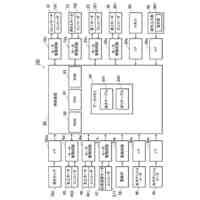
図12は、第1実施形態に係るステージの回転中心の測定に使用される処理装置16を示すブロック図である。
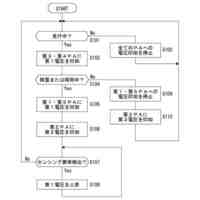
図13は、第1実施形態に係るステージの回転中心を測定するときの実装装置の動作を示す図である。
図14は、第1実施形態に係るステージの回転中心を測定するときの実装装置の動作を示す図である。
図15は、第1実施形態に係るステージの回転中心を測定するときの実装装置の動作を示す図である。
図16は、第1実施形態に係るステージの回転中心を測定するときの実装装置の動作を示す図である。
図17は、第1実施形態に係るステージの回転中心を測定するときの実装装置の動作を示す図である。
図18は、第1実施形態に係るステージの回転中心を測定するときの実装装置の動作を示す図である。
図19は、第2実施形態に係るステージの回転中心測定方法を説明するための図である。
図20は、第2実施形態に係るステージの回転中心を測定するときの実装装置の動作を示す図である。
図21は、第2実施形態に係るステージの回転中心を測定するときの実装装置の動作を示す図である。
図22は、第2実施形態に係る第1部位の座標及び第2部位の座標を示す図である。
図23は、第3実施形態に係るステージの回転中心測定方法を説明するための図である。
【発明を実施するための形態】
【0009】
以下、実施形態について図面を参照しながら説明する。実施形態においては、XYZ直交座標系を規定し、このXYZ直交座標系を参照しながら各部の位置関係について説明する。所定面のX軸に平行な方向をX軸方向とする。X軸に直交する所定面のY軸に平行な方向をY軸方向とする。所定面に直交するZ軸に平行な方向をZ軸方向とする。X軸方向を中心とする回転方向又は傾斜方向をθX方向とする。Y軸方向を中心とする回転方向又は傾斜方向をθY方向とする。Z軸方向を中心とする回転方向又は傾斜方向をθZ方向とする。実施形態において、所定面と水平面とは平行である。Z軸は鉛直軸に平行であり、Z軸方向は上下方向である。+Z側は上側であり、-Z側は下側である。なお、所定面は、水平面に対して傾斜してもよい。また、実施形態においては、X軸及びY軸を含む所定面を適宜、XY平面、と称する。
【0010】
[第1実施形態]
第1実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
JUKI株式会社
ミシン
2日前
JUKI株式会社
ミシン
2日前
JUKI株式会社
ミシン
2日前
JUKI株式会社
ミシン
7日前
JUKI株式会社
ハンドリング装置
2日前
JUKI株式会社
3次元計測装置及び3次元計測方法
1日前
個人
放電器
2日前
個人
静電気排除専用ノズル。
8日前
個人
day & night.
7日前
株式会社国際電気
取っ手付き機器
3日前
矢崎総業株式会社
導体冷却構造
2日前
矢崎総業株式会社
冷却構造付き導体部材
2日前
矢崎総業株式会社
冷却構造付き導体部材
2日前
矢崎総業株式会社
冷却構造付き導体部材
2日前
矢崎総業株式会社
冷媒流路付き導電部材
2日前
株式会社日立産機システム
プリント配線板
3日前
株式会社東芝
基板及び電子機器
3日前
ヤマハ発動機株式会社
表面実装機
7日前
株式会社SUBARU
車両
7日前
矢崎総業株式会社
発光制御装置
2日前
東芝ライテック株式会社
ヒータ、および画像形成装置
1日前
パナソニックIPマネジメント株式会社
点灯装置
1日前
沖電気工業株式会社
電子機器用筐体
7日前
味の素株式会社
プリント配線板の製造方法
1日前
株式会社FUJI
管理装置及び管理方法
1日前
ニチコン株式会社
電気機器装置および電源システム
8日前
株式会社荏原製作所
排ガス処理装置および排ガス処理方法
3日前
東莞市美昇智能科技有限公司
ヘアドライヤに用いられる高効率発熱モジュール
1日前
日亜化学工業株式会社
配線基板、複合基板、およびそれらの製造方法
3日前
アンリツ株式会社
X線発生器及びこれを備えたX線検査装置
3日前
サムソン エレクトロ-メカニックス カンパニーリミテッド.
プリント回路基板
3日前
パナソニックIPマネジメント株式会社
実装基板製造システムおよび実装データ作成装置ならびに実装データ作成方法
3日前
台達電子工業股ふん有限公司
LED駆動器およびLED照明システム
7日前
ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング
制御装置および鞍乗型車両
2日前
レール・リキード-ソシエテ・アノニム・プール・レテュード・エ・レクスプロワタシオン・デ・プロセデ・ジョルジュ・クロード
表面処理方法
1日前
他の特許を見る

 特許ウォッチ
特許ウォッチ