TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025044479
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023152063
出願日
2023-09-20
発明の名称
ミシン
出願人
JUKI株式会社
代理人
個人
,
個人
主分類
D05B
27/06 20060101AFI20250326BHJP(縫製;刺しゅう;タフティング)
要約
【課題】針落ち位置の両側で左右の搬送ベルトの送り位置での被縫製物の高低差がある場合に適正な送りを行う。
【解決手段】ミシンモータ16により縫い針11の上下動を行う針上下動機構と、針落ち位置の左右両側で個別に搬送ベルト41,42を上から当接させて針板101上の被縫製物の送りを行う上送り機構40と、左側の搬送ベルト41の送り位置における被縫製物の高さと右側の搬送ベルト42の送り位置における被縫製物の高さとを検出又はこれらの差を検出するための検出部48,49,762と、針上下動機構と上送り機構40の動作制御を行う制御装置90とを備え、制御装置90は、検出部48,49,762の検出に基づいて上送り機構40の左右の搬送ベルト41,42の送りの駆動を調整する制御を行う。
【選択図】図11
特許請求の範囲
【請求項1】
ミシンモータにより縫い針の上下動を行う針上下動機構と、
針落ち位置の左右両側で個別に搬送ベルトを上から当接させて針板上の被縫製物の送りを行う上送り機構と、
左側の前記搬送ベルトの送り位置における前記被縫製物の高さと右側の前記搬送ベルトの送り位置における前記被縫製物の高さとを検出又はこれらの差を検出するための検出部と、
前記針上下動機構と前記上送り機構の動作制御を行う制御装置とを備え、
前記制御装置は、前記検出部の検出に基づいて前記上送り機構の左右の前記搬送ベルトの送りの駆動を調整する制御を行うことを特徴とするミシン。
続きを表示(約 930 文字)
【請求項2】
前記制御装置は、前記検出部の検出に基づいて左側の前記搬送ベルトと右側の前記搬送ベルトの一方又は両方の送り量を調整する制御を行うことを特徴とする請求項1に記載のミシン。
【請求項3】
前記制御装置は、左右の前記搬送ベルトの内、送り位置における前記被縫製物の高さが高い方の送り量を相対的に増やす制御を行うことを特徴とする請求項2に記載のミシン。
【請求項4】
前記制御装置は、左右の前記搬送ベルトの内、送り位置における前記被縫製物の高さが低い方の送り量を相対的に増やす制御を行うことを特徴とする請求項2に記載のミシン。
【請求項5】
前記制御装置は、前記検出部の検出に基づいて左側の前記搬送ベルトと右側の前記搬送ベルトの一方又は両方の送り速度を調整する制御を行うことを特徴とする請求項1に記載のミシン。
【請求項6】
前記制御装置は、左右の前記搬送ベルトの内、送り位置における前記被縫製物の高さが高い方の送り速度を相対的に速くする制御を行うことを特徴とする請求項5に記載のミシン。
【請求項7】
前記制御装置は、左右の前記搬送ベルトの内、送り位置における前記被縫製物の高さが低い方の送り速度を相対的に速くする制御を行うことを特徴とする請求項5に記載のミシン。
【請求項8】
前記制御装置は、前記検出部の検出に基づいて左側の前記搬送ベルトの送りを行うモータと右側の前記搬送ベルトの送りを行うモータの一方又は両方のトルクを調整する制御を行うことを特徴とする請求項1に記載のミシン。
【請求項9】
前記制御装置は、左右の前記搬送ベルトの内、送り位置における前記被縫製物の高さが高い方の送りを行うモータのトルクを相対的に大きくする制御を行うことを特徴とする請求項8に記載のミシン。
【請求項10】
前記制御装置は、左右の前記搬送ベルトの内、送り位置における前記被縫製物の高さが低い方の送りを行うモータのトルクを相対的に大きくする制御を行うことを特徴とする請求項8に記載のミシン。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ミシンに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
針板上方であって針落ち位置の左右両側に個別に上送り部を設け、各上送り部が備える搬送ベルトによって被縫製物の送りを行うミシンがある。
このミシンでは、針板上の被縫製物に直接上から検出アームが接触して被縫製物の厚さの検出を行っていた(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2006-158497号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記ミシンでは、被縫製物の厚さを被縫製物に対して一か所で行っていた。このため、左右の上送り部がそれぞれベルト送りを行う針落ち位置の両側で被縫製物の厚さに差を生じた場合に、これを検出することができなかった。
【0005】
本発明は、針落ち位置の両側で左右の搬送ベルトの送り位置での被縫製物の高低差がある場合に適正な送りを行うことをその目的とする。
【課題を解決するための手段】
【0006】
本発明は、ミシンにおいて、
ミシンモータにより縫い針の上下動を行う針上下動機構と、
針落ち位置の左右両側で個別に搬送ベルトを上から当接させて針板上の被縫製物の送りを行う上送り機構と、
左側の前記搬送ベルトの送り位置における前記被縫製物の高さと右側の前記搬送ベルトの送り位置における前記被縫製物の高さとを検出又はこれらの差を検出するための検出部と、
前記針上下動機構と前記上送り機構の動作制御を行う制御装置とを備え、
前記制御装置は、前記検出部の検出に基づいて前記上送り機構の左右の前記搬送ベルトの送りの駆動を調整する制御を行うことを特徴とする。
【発明の効果】
【0007】
本発明のミシンは、針落ち位置の両側で左右の搬送ベルトの送り位置での被縫製物の高低差がある場合に適正な送りを行うことが可能となる。
【図面の簡単な説明】
【0008】
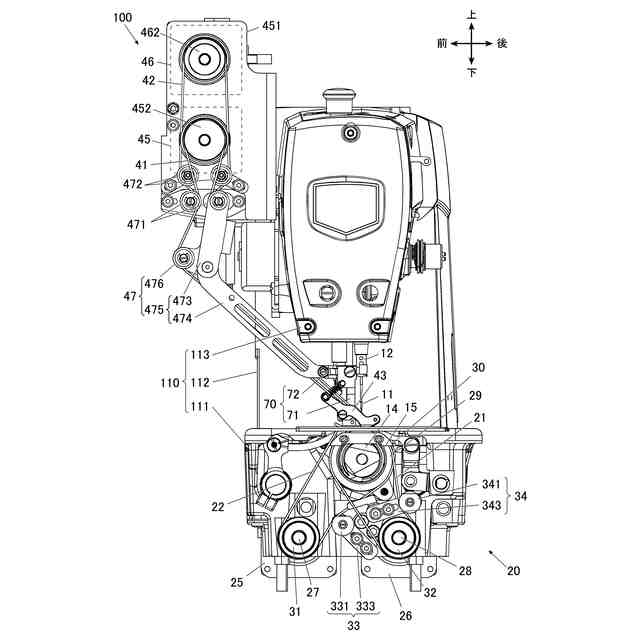
発明の実施形態であるミシンの後面図である。
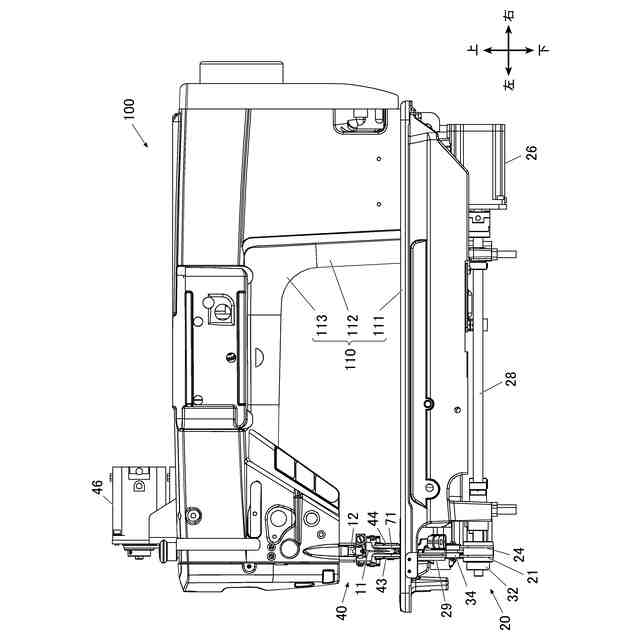
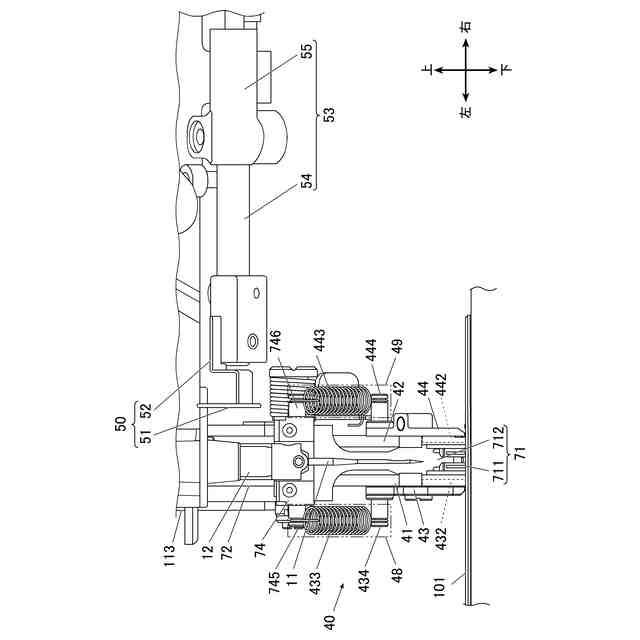
ミシンの左側面図である。
ミシンの斜視図である。
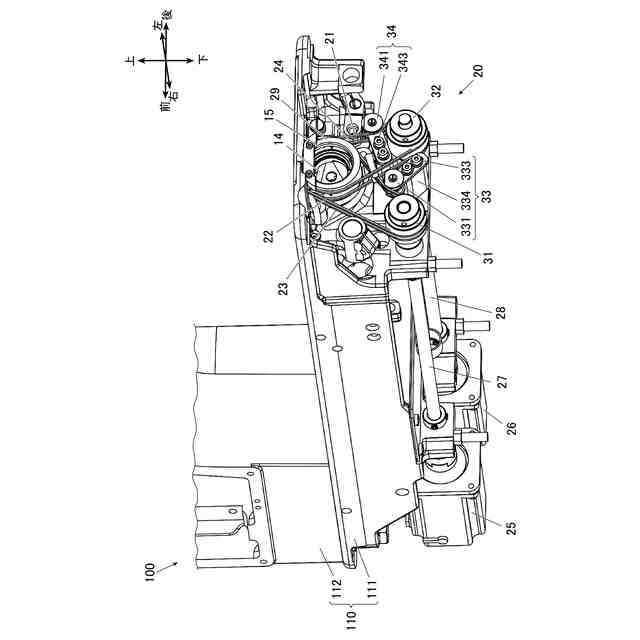
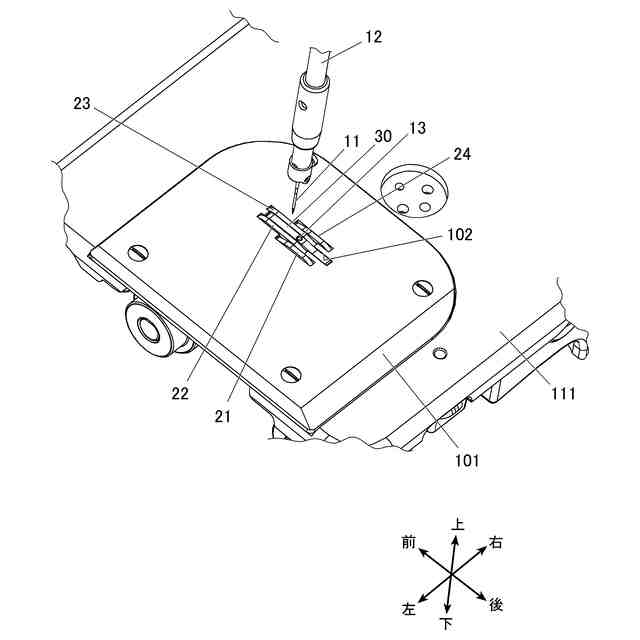
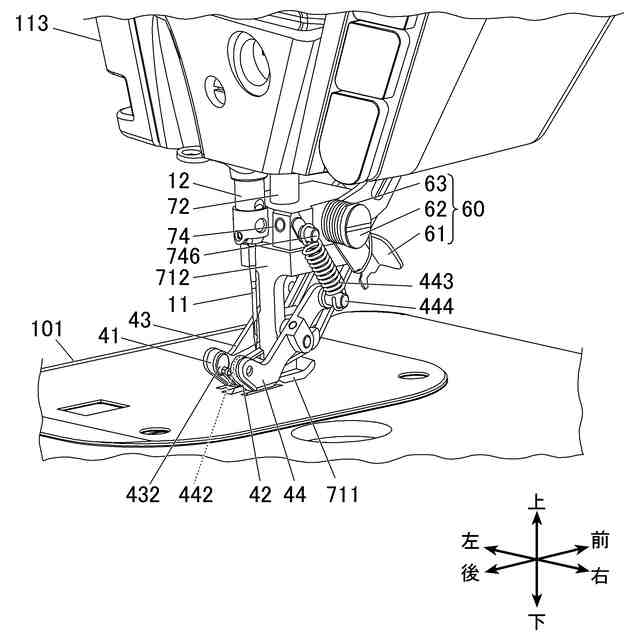
押さえ足の図示を省略したミシンベッド部の左端部上面を示す斜視図である。
下送り機構のガイド枠の斜視図である。
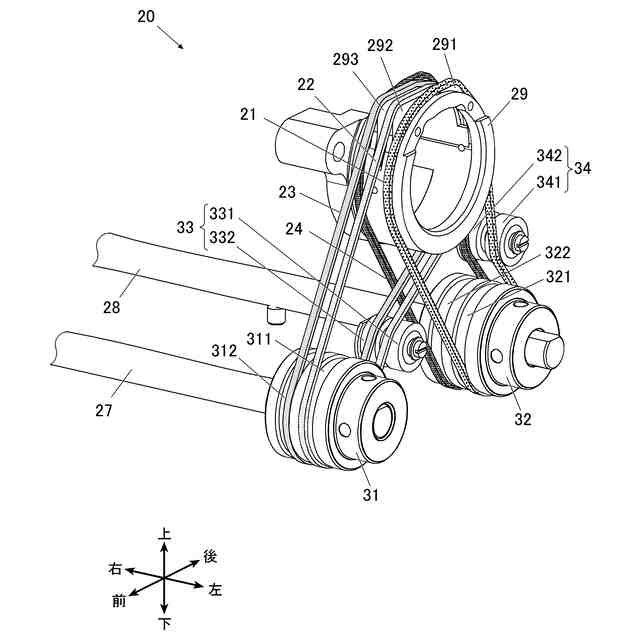
四本の搬送ベルトが前後差動送り状態にある送り機構の斜視図である。
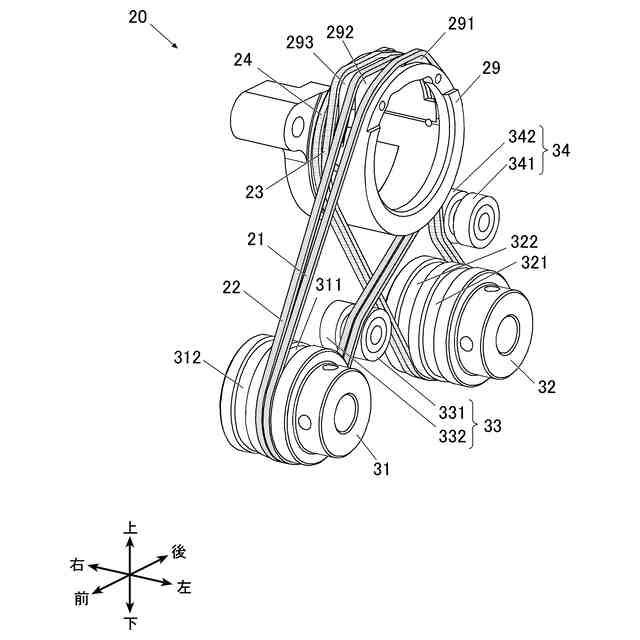
四本の搬送ベルトが左右差動送り状態にある送り機構の斜視図である。
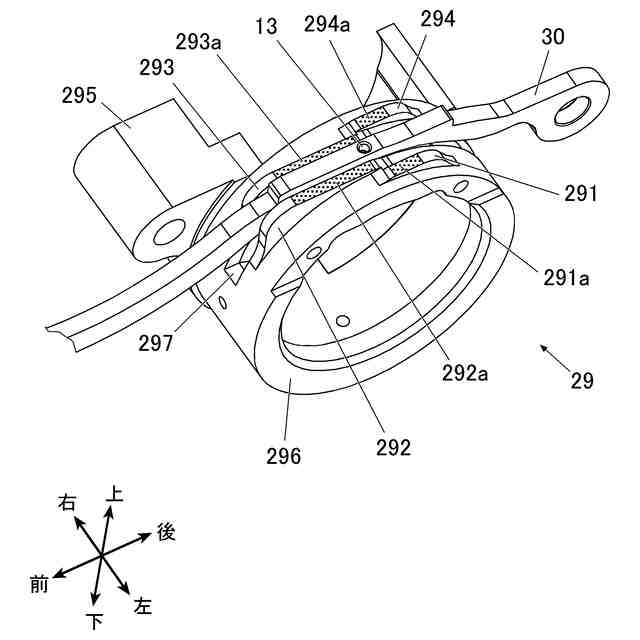
針板上で被縫製物を上から押さえる布押さえ機構周辺の斜視図である。
布押さえ機構周辺の後面図である。
布押さえ機構周辺の右側面図である。
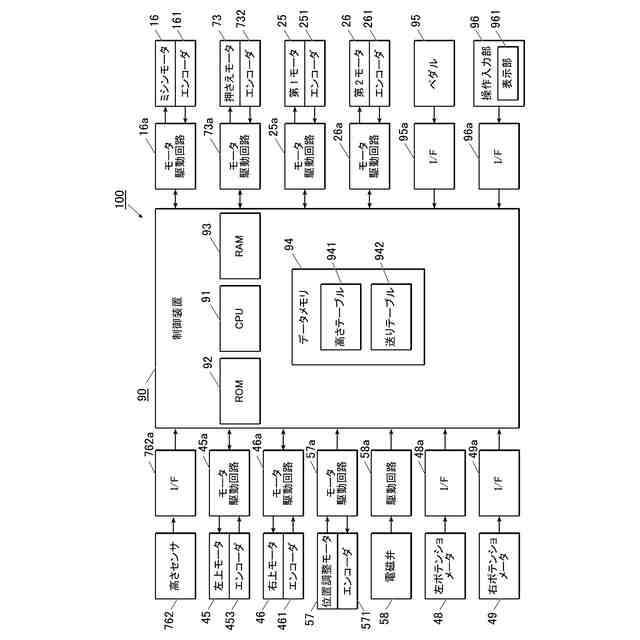
ミシンの制御系を示すブロック図である。
検出部として距離センサを使用した例を示す布押さえ機構周辺の後面図である。
針板に直接的に針穴を形成した例を示すミシンベッド部の左端部上面を示す斜視図である。
【発明を実施するための形態】
【0009】
[発明の実施形態の概要]
以下、本発明の実施形態であるミシン100について詳細に説明する。
図1はミシン100の後面図、図2はミシン100の左側面図、図3はミシン100の斜視図を示す。
以下、被縫製物(図12参照)の送り方向下流側を「前」、送り方向上流側を「後」、前を向いた状態で左手側を「左」、右手側を「右」、鉛直上方を「上」、鉛直下方を「下」とする。前後方向、左右方向、上下方向は、互いに直交する。
以下の説明では、ミシン100は水平面に設置されている前提であり、前後方向と左右方向は、水平となる。
【0010】
本発明の実施形態であるミシン100として、いわゆる本縫いミシンを例示する。
ミシン100は、ミシンフレーム110、針上下動機構、送り装置としての下送り機構20、送り装置としての上送り機構40、押さえ機構としての布押さえ機構70、釜機構、位置決め定規50(図11参照)及び退避機構60(図11参照)を備えている。
針上下動機構は、縫い針11に上下動動作を付与する。
下送り機構20は、針板101上の被縫製物に下から送り動作を付与する。
上送り機構40は、針板101上の被縫製物に上から送り動作を付与する。
布押さえ機構70は、針板101上の被縫製物に押さえ圧を付与する。
釜機構は、縫い針11から上糸のループを捕捉して下糸を絡め、縫い目を形成する。
位置決め定規50は、被縫製物の側端部を突き当てて当該側端部から縫い目までの距離であるコバ幅を決定する。
退避機構60は、位置決め定規50を使用する際に干渉を避けるために上送り機構40のベルトガイド44を退避位置に保持する。
なお、上記ミシン100は、一般的な本縫いミシンが備える、天秤機構、糸調子等の各構成を備えているが、これらは周知のものなので説明は省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ