TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025002860
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023103234
出願日
2023-06-23
発明の名称
制御装置、ロボット溶接システム及び溶接方法
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B23K
9/127 20060101AFI20241226BHJP(工作機械;他に分類されない金属加工)
要約
【課題】材質・形状の異なる様々な継手の溶接についても個別にプログラムを作成する必要なく、自動溶接を行うことができる手段を提供する。
【解決手段】制御装置は、溶接に対する要求を含む要求情報を取得する手段と、前記溶接の開始位置および終了位置と座標情報の教示を受け付ける手段と、前記教示に基づいて自動センシングにより、前記溶接の対象の開先の形状情報を計測する手段と、前記開先の形状情報と前記要求情報に基づいて、前記溶接のパスと、前記溶接の溶接条件と、前記溶接を実行するプログラムと、を含むパスプラン情報をパスプランDBから取得する手段と、前記パスプラン情報に基づく溶接を溶接ロボットに指示する手段とを有する。
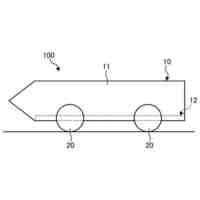
【選択図】図1
特許請求の範囲
【請求項1】
溶接に対する要求を含む要求情報を取得する手段と、
前記溶接の開始位置および終了位置と座標情報の教示を受け付ける手段と、
前記教示に基づいて自動センシングにより、前記溶接の対象の開先の形状情報を計測する手段と、
前記開先の形状情報と前記要求情報に基づいて、前記溶接のパスと、前記溶接の溶接条件と、前記溶接を実行するプログラムと、を含むパスプラン情報をパスプランDBから取得する手段と、
前記パスプラン情報に基づく溶接を溶接ロボットに指示する手段と、
を有する制御装置。
続きを表示(約 1,000 文字)
【請求項2】
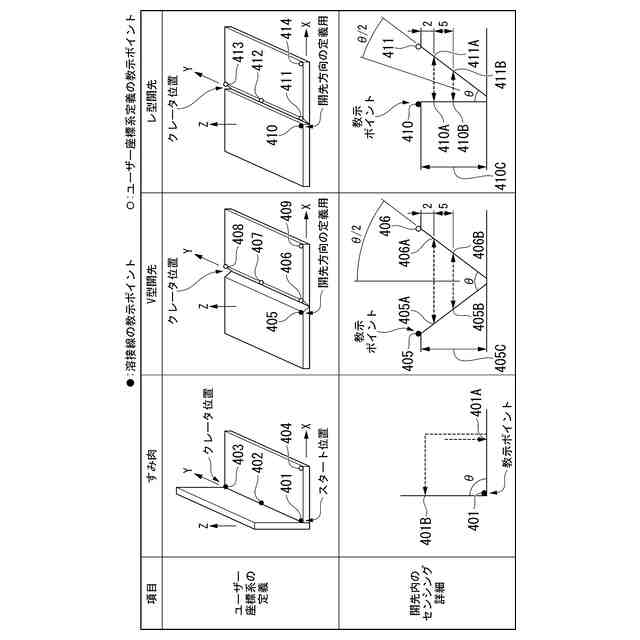
前記自動センシングでのセンシングポイントは、前記開先の形状ごとに前記開始位置との相対的な位置関係が予め定められており、
前記計測する手段は、当該位置関係に基づいてセンシングポイントを算出する、
請求項1に記載の制御装置。
【請求項3】
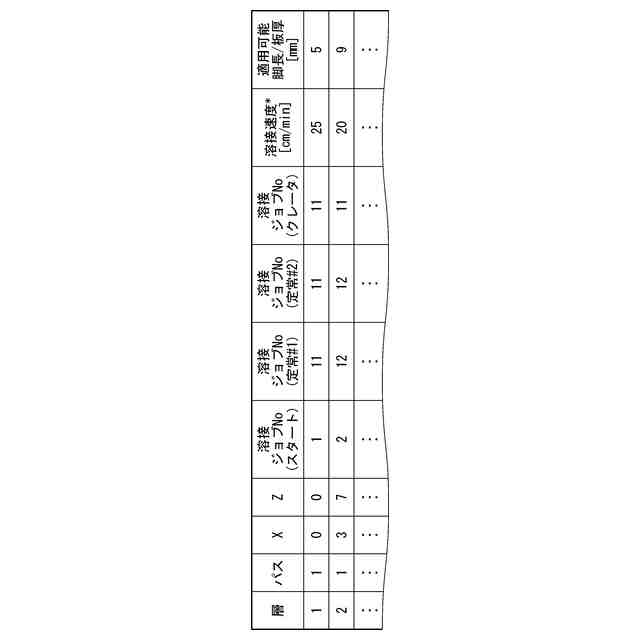
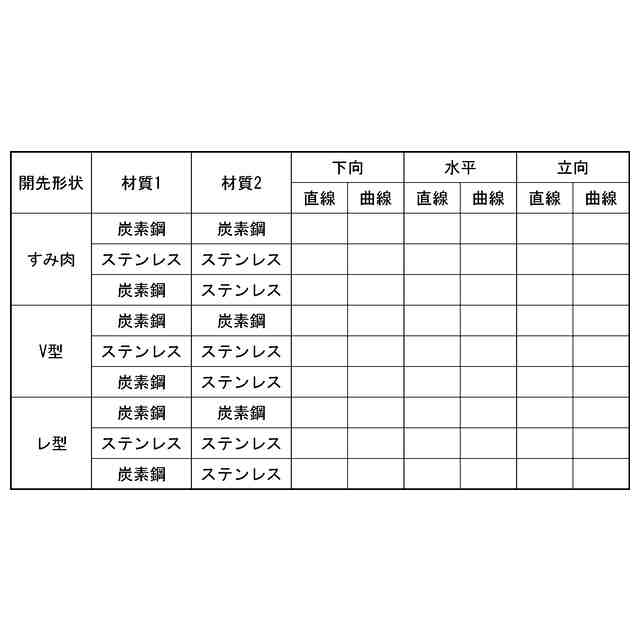
前記パスプランDBには、開先形状、溶接対象の材質、溶接姿勢、溶接面の形状に応じて、溶接線を構成する層、前記層を構成する前記パスごとに、前記溶接の溶接条件と、前記溶接を実行するプログラムとが定義されている、
請求項1又は請求項2に記載の制御装置。
【請求項4】
前記パスプランDBには、前記パスと対応付けて適用可能な板厚が設定されていて、
前記取得する手段は、前記開先の形状情報に含まれる板厚が、前記パスプランDBにて設定された前記板厚を超えず、且つ溶接する前記パスの数が最大となるよう前記パスプラン情報を取得する、
請求項1又は請求項2に記載の制御装置。
【請求項5】
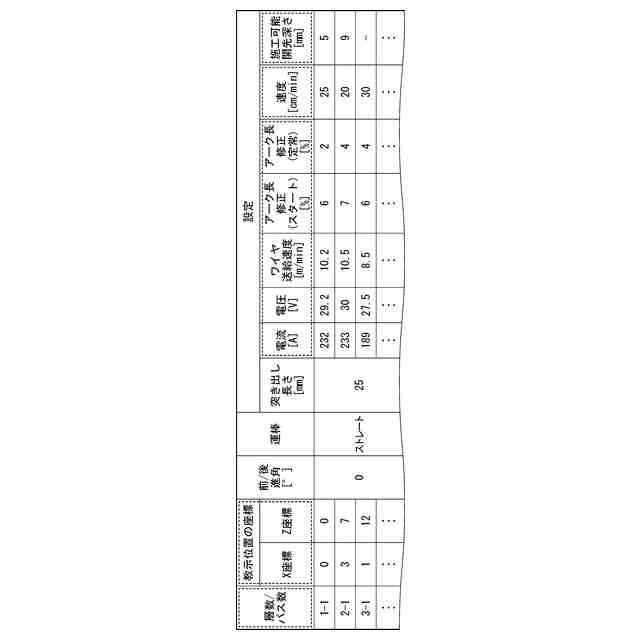
前記溶接を実行するプログラムは、前記開先、溶接の開始時、溶接の定常実行状態時、溶接の終了時に応じて適切な溶接が行えるよう様々な種類のプログラムが予め用意され、
前記パスプランDBには、前記パスごとに前記開先別に、前記開始時用の前記プログラム、前記定常状態時用の前記プログラム、前記終了時用の前記プログラムが設定されている、
請求項1又は請求項2に記載の制御装置。
【請求項6】
前記教示を受け付ける手段は、さらに前記開始位置と前記終了位置の間に存在する中間位置の教示を受け付ける、
請求項1又は請求項2に記載の制御装置。
【請求項7】
溶接ロボットと、
請求項1又は請求項2に記載の制御装置と、
を有するロボット溶接システム。
【請求項8】
溶接に対する要求を含む要求情報を取得するステップと、
前記溶接の開始位置および終了位置と座標情報の教示を受け付けるステップと、
前記教示に基づいて自動センシングにより、前記溶接の対象の開先の形状情報を計測するステップと、
前記開先の形状情報と前記要求情報に基づいて、前記溶接のパスと、前記溶接の溶接条件と、前記溶接を実行するプログラムと、を含むパスプラン情報をパスプランDBから取得するステップと、
前記パスプラン情報に基づいて溶接を実行する手段と、
を有する溶接方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、ロボット溶接システム及び溶接方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
自動溶接ロボットで溶接を行う場合、一般には、継手の形状に応じて、都度専用のロジックを検討し、専用プログラムを作成する。この作業には、多大なコストが必要となる。特許文献1には、通常であれば継手ごとに溶接ロボットのプログラムを作成するところ、オフラインティーチングによりマスタープログラムを作成し、溶接対象の継手の寸法などを入力し、マスタープログラムと入力された寸法から専用プログラムを自動的に作成する技術が開示されている。特許文献1の技術を用いることにより、ロボット溶接に必要な専用プログラムを効率よく作成することができるが、適用対象が母管と枝管とが交差する管継手に限定される。
【先行技術文献】
【特許文献】
【0003】
特開平10-94874号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
材質・形状の異なる様々な継手に対して、都度プログラムを作成することなく、自動溶接を実行することができる技術が求められている。
【0005】
本開示は、上記課題を解決することができる制御装置、ロボット溶接システム及び溶接方法を提供する。
【課題を解決するための手段】
【0006】
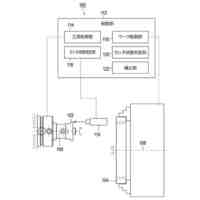
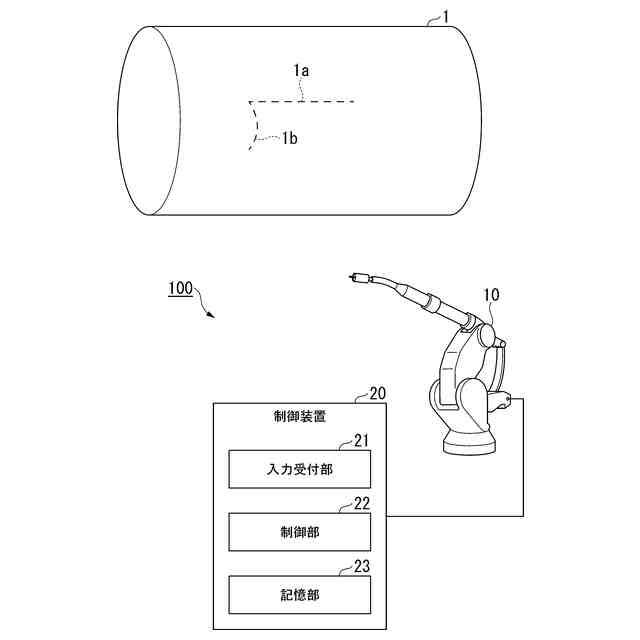
本開示に係る制御装置は、溶接に対する要求を含む要求情報を取得する手段と、前記溶接の開始位置および終了位置と座標情報の教示を受け付ける手段と、前記教示に基づいて自動センシングにより、前記溶接の対象の開先の形状情報を計測する手段と、前記開先の形状情報と前記要求情報に基づいて、前記溶接のパスと、前記溶接の溶接条件と、前記溶接を実行するプログラムと、を含むパスプラン情報をパスプランDBから取得する手段と、前記パスプラン情報に基づく溶接を溶接ロボットに指示する手段と、を有する。
【0007】
本開示に係るロボット溶接システムは、溶接ロボットと、上記の制御装置とを有する。
【0008】
本開示に係る溶接方法は、溶接に対する要求を含む要求情報を取得するステップと、前記溶接の開始位置および終了位置と座標情報の教示を受け付けるステップと、前記教示に基づいて自動センシングにより、前記溶接の対象の開先の形状情報を計測するステップと、前記開先の形状情報と前記要求情報に基づいて、前記溶接のパスと、前記溶接の溶接条件と、前記溶接を実行するプログラムと、を含むパスプラン情報をパスプランDBから取得するステップと、前記パスプラン情報に基づいて溶接を実行する手段と、を有する。
【発明の効果】
【0009】
本開示の制御装置、ロボット溶接システム及び溶接方法によれば、材質・形状の異なる様々な継手の溶接についても個別にプログラムを作成する必要なく、自動溶接を行うことができる。
【図面の簡単な説明】
【0010】
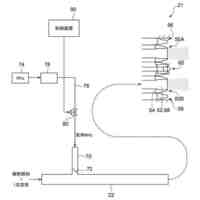
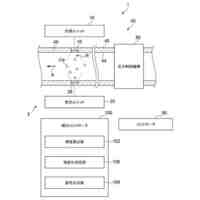
実施形態に係るロボット溶接システムの概略を示す図である。
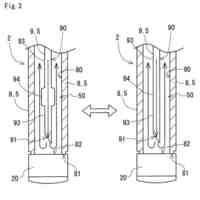
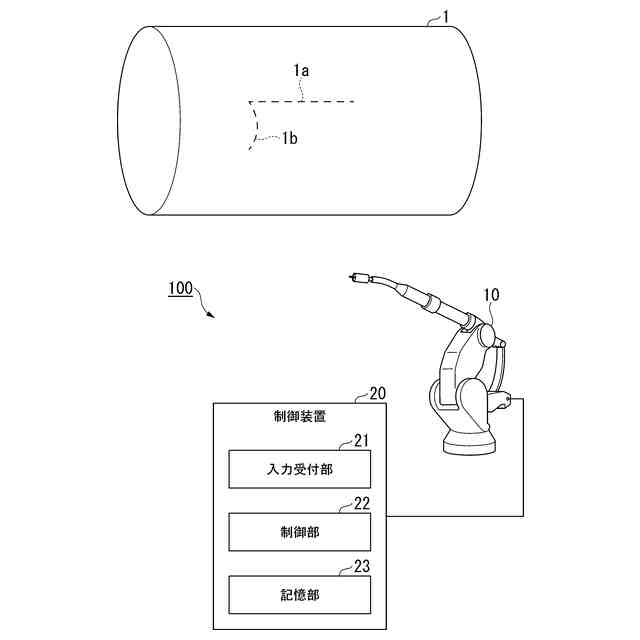
実施形態に係るプログラムの構成の一例を示す図である。
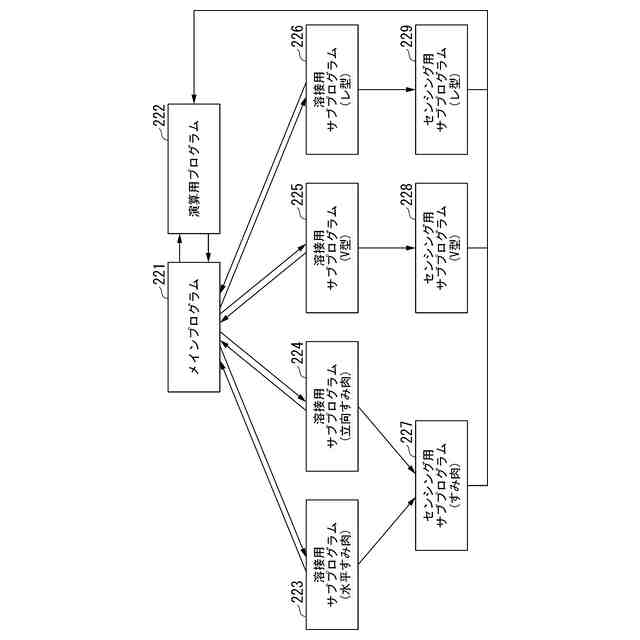
実施形態に係る設定画面の一例を示す図である。
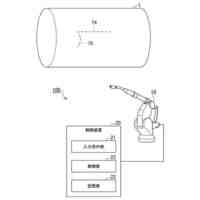
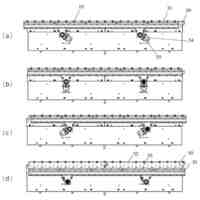
実施形態に係るティーチング及びセンシングの一例について説明する図である。
実施形態に係るパスプランDBの一例を示す第1の図である。
実施形態に係るパスプランDBの一例を示す第2の図である。
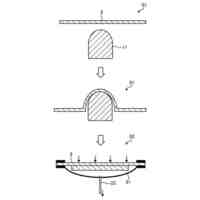
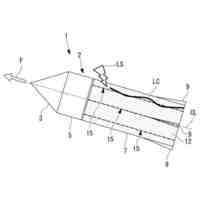
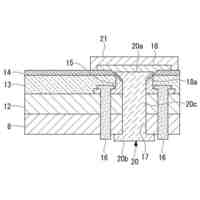
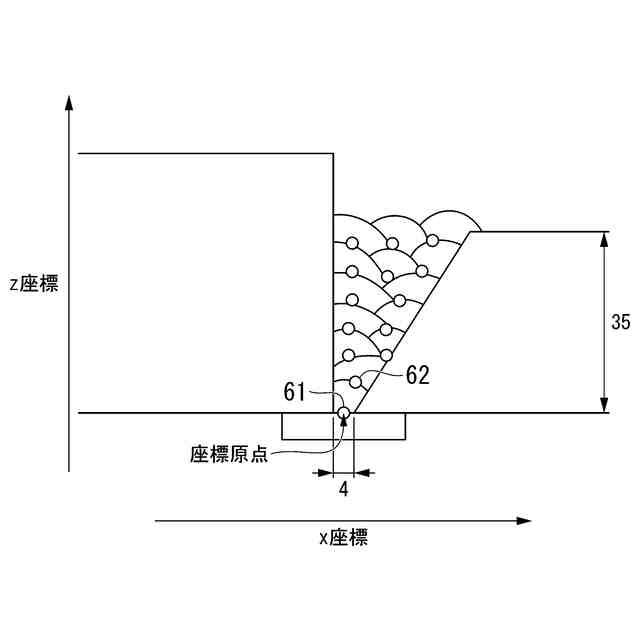
実施形態に係る溶接面の断面の一例を示す図である。
実施形態に係るパスプランDB作成パターンの一例を示す図である。
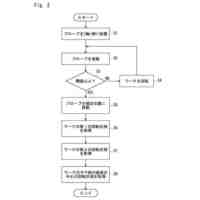
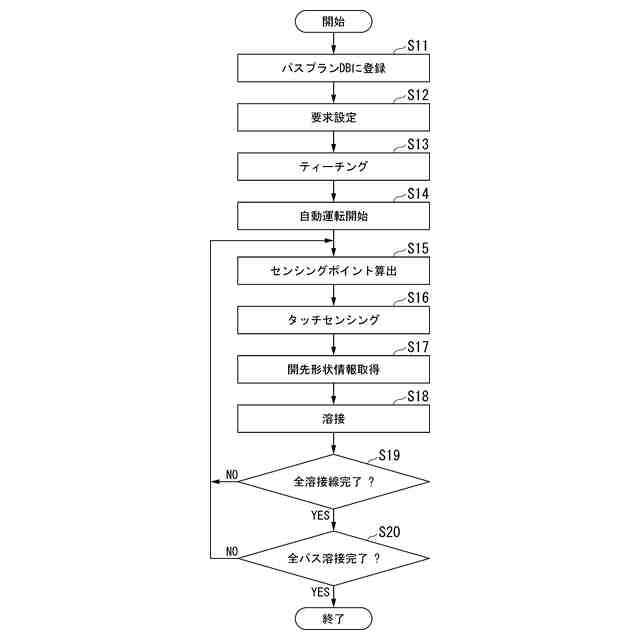
実施形態に係る自動溶接方法の一例を示すフローチャートである。
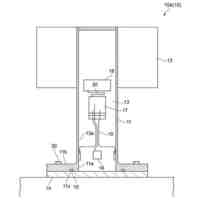
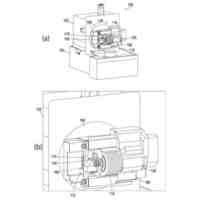
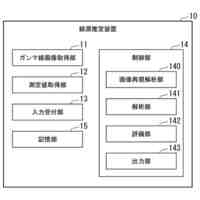
実施形態の制御装置のハードウェア構成の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱重工業株式会社
装甲車
1日前
三菱重工業株式会社
真空成形方法
1日前
三菱重工業株式会社
攪拌翼及び攪拌装置
1日前
三菱重工業株式会社
払出システム及び払出方法
1日前
三菱重工業株式会社
バーナ及びボイラ並びに燃焼方法
1日前
三菱重工業株式会社
管理方法、管理装置及びプログラム
1日前
三菱重工業株式会社
制御装置、ロボット溶接システム及び溶接方法
1日前
三菱重工業株式会社
ロケットの耐雷構造及びこれを備えたロケット
1日前
三菱重工業株式会社
相変化検出装置、および、液化ガス供給システム
1日前
三菱重工業株式会社
廃棄物処理システム及びこの廃棄物処理システムの運転方法
1日前
三菱重工業株式会社
線源推定方法、線量低減対策評価方法、画像再現方法、線源推定装置及びプログラム
1日前
三菱重工業株式会社
ロケットの耐雷構造及びこれを備えたロケット並びにロケットの耐雷構造の製造方法
1日前
個人
作業用治具
2か月前
個人
トーチノズル
2か月前
日東精工株式会社
検査装置
2か月前
個人
コンタクトチップ
3か月前
日東精工株式会社
組み付け装置
2か月前
シヤチハタ株式会社
組立ライン
2か月前
有限会社津谷工業
切削工具
1か月前
エンシュウ株式会社
工作機械
2か月前
株式会社不二越
タップ
1か月前
株式会社ダイヘン
インチング制御方法
2か月前
トヨタ自動車株式会社
積層コア
2日前
ダイハツ工業株式会社
冷却構造
2か月前
株式会社ダイヘン
アーク溶接制御方法
1か月前
株式会社不二越
歯車研削盤
1か月前
株式会社不二越
歯車加工機
29日前
株式会社メドメタレックス
ドリル
1日前
株式会社メタルクリエイト
切削装置
1か月前
株式会社浪速試錐工業所
防風カバー
1か月前
トヨタ自動車株式会社
位相測定方法
1日前
サムテック株式会社
加工物製造方法
1日前
株式会社ヤマダスポット
抵抗溶接機
1か月前
津田駒工業株式会社
工作機械用の主軸装置
2か月前
株式会社ダイヘン
アークスタート制御方法
2か月前
株式会社FUJI
自動化用パレット
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ