TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025002166
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023102132
出願日
2023-06-22
発明の名称
ロボット制御システム、および、ロボット制御方法
出願人
株式会社日立ハイテク
代理人
ポレール弁理士法人
主分類
G05D
1/43 20240101AFI20241226BHJP(制御;調整)
要約
【課題】 作業現場での経路設定作業時間を短縮する。
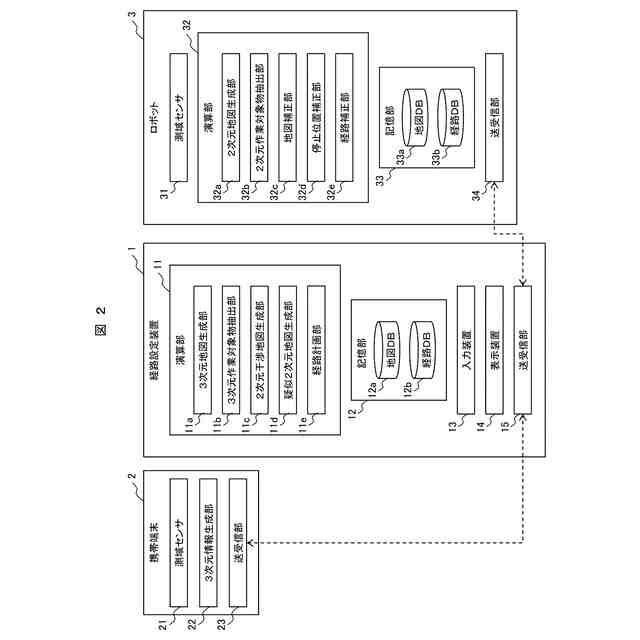
【解決手段】 自律移動ロボットと、携帯端末と、経路設定装置と、を備えたロボット制御システムであって、経路設定装置は、3次元情報に基づいて作業現場の3次元地図を生成する3次元地図生成部と、3次元地図に基づいて2次元干渉地図を生成する2次元干渉地図生成部と、3次元地図に基づいて疑似2次元地図を生成する疑似2次元地図生成部と、移動経路を設定する経路計画部と、を有し、自律移動ロボットは、センサ設置高さでの作業現場の2次元情報を取得するロボット測域センサと、2次元情報に基づいて実機2次元地図を生成する2次元地図生成部と、実機2次元地図と疑似2次元地図で位置合わせされた座標によって、2次元干渉地図を補正する地図補正部と、補正後の2次元干渉地図に基づいて移動経路を補正する経路補正部と、を有するロボット制御システム。
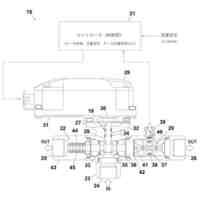
【選択図】 図2
特許請求の範囲
【請求項1】
作業現場に設置された作業対象物に対して所定のタスクを実行する自律移動ロボットと、
端末測域センサを用いて前記作業現場の3次元情報を取得する携帯端末と、
前記3次元情報に基づいて前記自律移動ロボットの移動経路を設定する経路設定装置と、
を備えたロボット制御システムであって、
前記経路設定装置は、
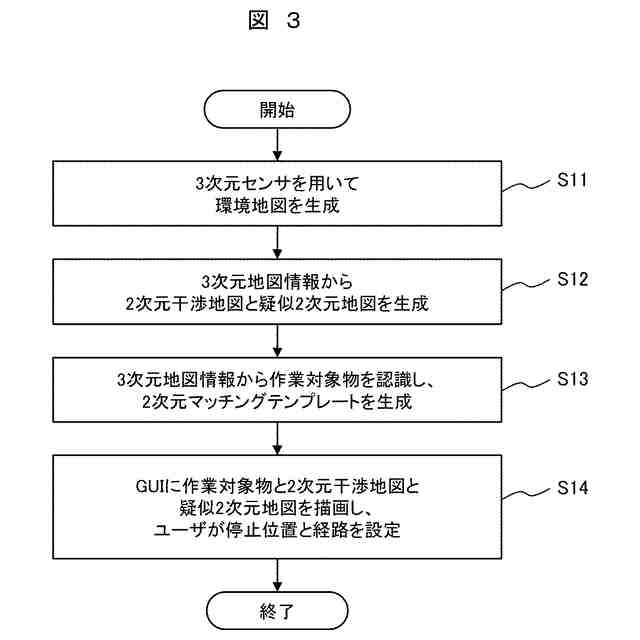
前記3次元情報に基づいて、前記作業現場の3次元地図を生成する3次元地図生成部と、
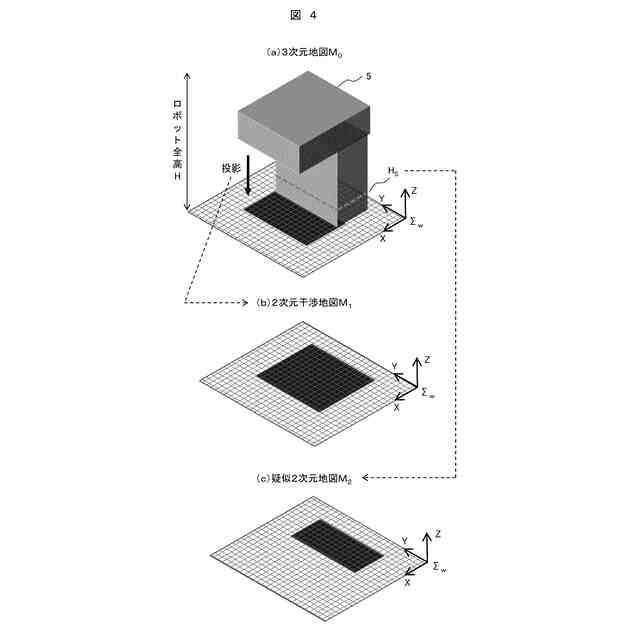
前記3次元地図に基づいて、前記自律移動ロボットの立体形状と前記作業現場に設置された障害物との干渉を考慮した2次元干渉地図を生成する2次元干渉地図生成部と、
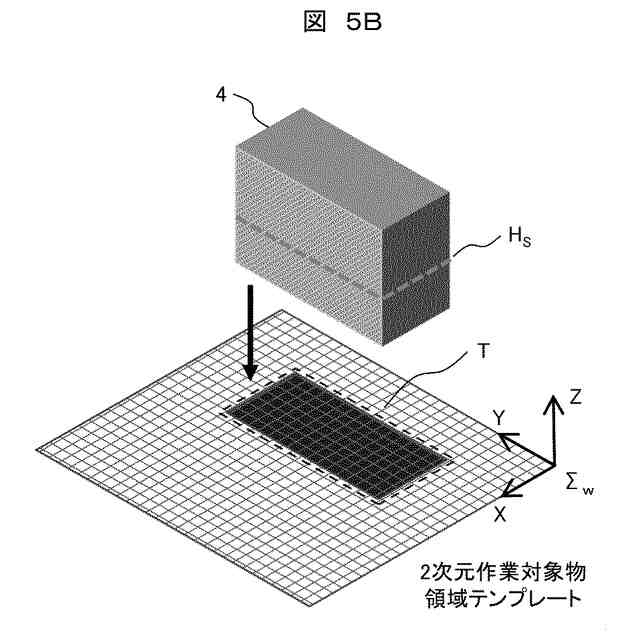
前記3次元地図に基づいて、所定のセンサ設置高さでの前記障害物との干渉を考慮した疑似2次元地図を生成する疑似2次元地図生成部と、
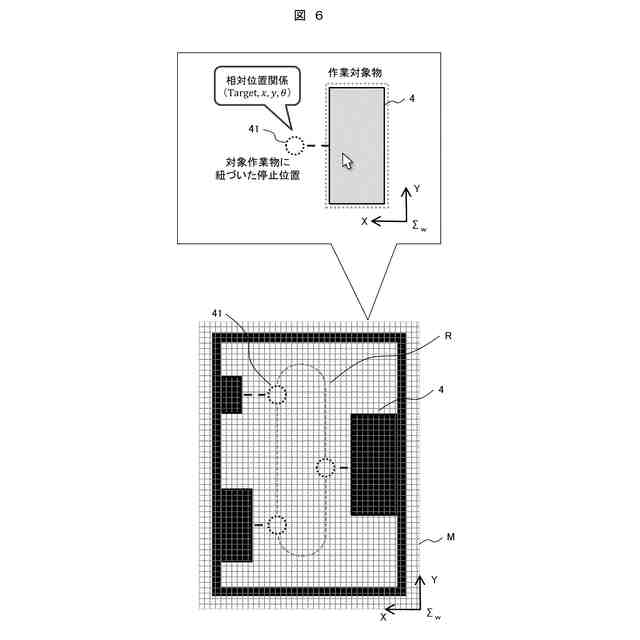
前記作業対象物に対して設定された停止位置に基づいて前記移動経路を設定する経路計画部と、を有し、
前記自律移動ロボットは、
前記センサ設置高さでの前記作業現場の2次元情報を取得するロボット測域センサと、
前記2次元情報に基づいて実機2次元地図を生成する2次元地図生成部と、
前記実機2次元地図と前記疑似2次元地図で位置合わせされた座標によって、前記2次元干渉地図を補正する地図補正部と、
補正後の前記2次元干渉地図に基づいて前記移動経路を補正する経路補正部と、
を有することを特徴とするロボット制御システム。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載のロボット制御システムにおいて、
前記経路設定装置は、さらに、
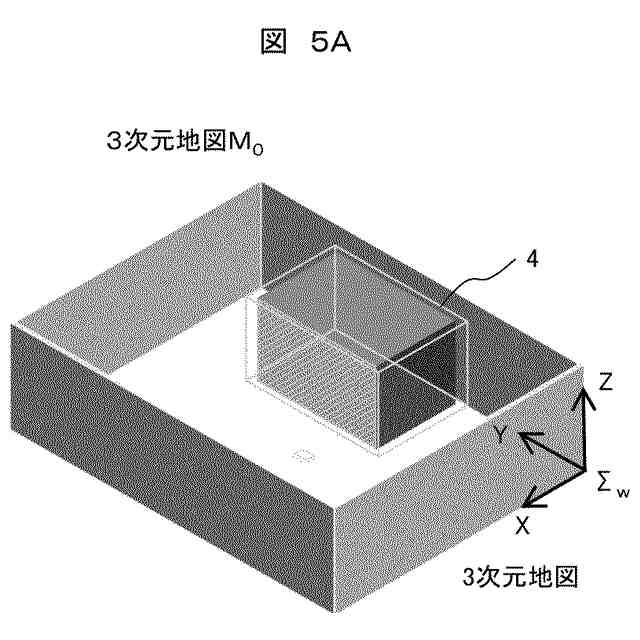
前記3次元地図から前記作業対象物を抽出する3次元作業対象物抽出部を有し、
前記自律移動ロボットは、さらに、
前記実機2次元地図から前記作業対象物を抽出する2次元作業対象物抽出部と、
前記3次元作業対象物抽出部が抽出した前記作業対象物の位置と、前記2次元作業対象物抽出部が抽出した前記作業対象物の位置と、を比較することで、前記停止位置を補正する停止位置補正部と、
を有することを特徴とするロボット制御システム。
【請求項3】
請求項1に記載のロボット制御システムにおいて、
前記2次元干渉地図は、床面から前記自律移動ロボットの全高までの範囲における前記自律移動ロボットの立体形状と前記障害物との干渉を考慮した地図であり、
前記全高は、ユーザが前記経路設定装置に入力した情報であることを特徴とするロボット制御システム。
【請求項4】
請求項1に記載のロボット制御システムにおいて、
前記地図補正部は、前記実機2次元地図の点群と前記疑似2次元地図の点群の位置誤差を算出し、前記実機2次元地図の点群と前記疑似2次元地図の点群とにおける対応する最近傍の点群同士を対応付け、前記実機2次元地図と前記疑似2次元地図との各点群の誤差量を、前記2次元干渉地図の対応する各点群に与えることで、前記2次元干渉地図の歪み補正を行うことを特徴とするロボット制御システム。
【請求項5】
作業現場に設置された作業対象物に対して所定のタスクを実行する自律移動ロボットと、
端末測域センサを用いて前記作業現場の3次元情報を取得する携帯端末と、
前記3次元情報に基づいて前記自律移動ロボットの移動経路を設定する経路設定装置と、
を用いるロボット制御方法であって、
前記3次元情報に基づいて、前記作業現場の3次元地図を生成する3次元地図生成ステップと、
前記3次元地図に基づいて、前記自律移動ロボットの立体形状と前記作業現場に設置された障害物との干渉を考慮した2次元干渉地図を生成する2次元干渉地図生成ステップと、
前記3次元地図に基づいて、所定のセンサ設置高さでの前記障害物との干渉を考慮した疑似2次元地図を生成する疑似2次元地図生成ステップと、
前記作業対象物に対して設定された停止位置に基づいて前記移動経路を設定する経路計画ステップと、
前記センサ設置高さでの前記作業現場の2次元情報を取得する2次元情報取得ステップと、
前記2次元情報に基づいて実機2次元地図を生成する2次元地図生成ステップと、
前記実機2次元地図と前記疑似2次元地図で位置合わせされた座標によって、前記2次元干渉地図を補正する地図補正ステップと、
補正後の前記2次元干渉地図に基づいて前記移動経路を補正する経路補正ステップと、
を有することを特徴とするロボット制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律移動ロボットの移動経路を設定する、ロボット制御システム、および、ロボット制御方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
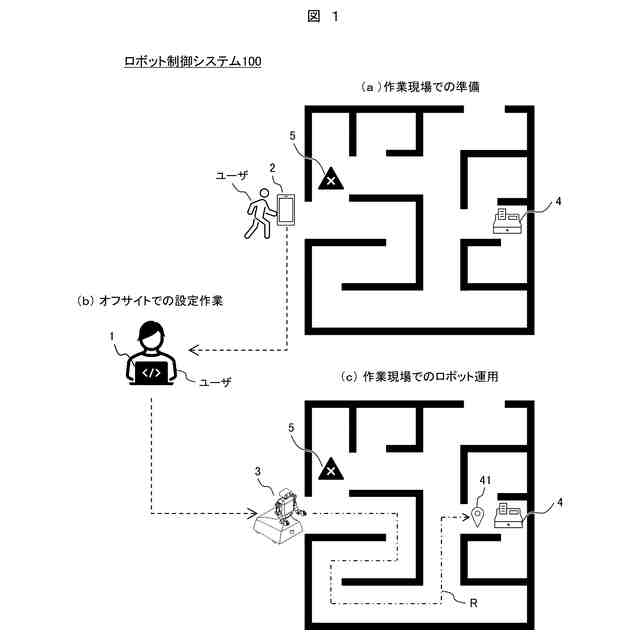
近年、様々な作業の省人化や自動化を目的として、磁気テープなどのガイドを使わずに作業現場の中を自律的に移動する自律移動ロボット(以下、単に「ロボット」と称する)の活用が進んでいる。このようなロボットの中には、自己に搭載した測域センサの計測データに基づいて環境地図を自動作成するものや、測域センサの計測データを用いて既存の環境地図上での自己位置を推定しながら、その地図上の指定座標まで自律的に移動するものがある。
【0003】
従来、この種のロボットの現場導入前には、実際の作業現場でロボットを手動操作で移動させながら環境地図を自動作成させた後、自動作成させた環境地図上での移動経路を手動設定するという、ユーザによる準備が必要であった。
【0004】
しかしながら、従来ロボットの搭載センサは2次元測域センサであり、この測域センサで計測できる情報はセンサ設置高さでレーザを走査した2次元の地図情報に留まる。そのため、従来ロボットが自動作成した地図情報は、ロボットが作業現場内の立体的な構造物と干渉することなく自律移動する際に参照する地図情報としては必ずしも有効ではなかった。
【0005】
例えば、作業現場に作業台が設置されており、ロボットの測域センサの設置高さが作業台の脚の高さに相当する場合、その測域センサで計測できるのは作業台の脚の反射像だけであり、脚の上部にある台面の形状、すなわちロボットの移動経路の設定時に考慮を要する実体障害物の形状を正しく捉えることができなかった。
【0006】
従って、ロボットと実体障害物の干渉を適切に判定できる環境地図を用意するには、ロボットが進入できない領域を示す情報を環境地図中に手作業で追加するか、実体障害物である台面を床面に投影した形状のフェンスなどの構造物を、2次元測域センサで計測可能な高さに設置したうえで、ロボットに環境地図を自動作成させるなどの煩雑な作業が必要であり、ロボット運用する前の準備に多くの工数を要していた。
【0007】
これらを踏まえ、特許文献1では、要約書に記載の「自律移動装置が自律移動に利用する地図が効率良く得られるようにする。」なる課題を、「移動空間の床を移動可能な自律移動装置に対して、前記移動空間における障害物の位置に関する情報を含む経路計画用地図を提供する地図提供システムとして、前記移動空間における前記障害物の3次元形状に関する情報を含む3次元地図を記憶する記憶部と、鉛直方向における前記床から前記自律移動装置の高さに関する情報を取得する取得部と、前記3次元地図と、前記自律移動装置の前記高さに関する情報と、に基づいて、鉛直方向における前記床から前記自律移動装置の高さまでの範囲における、前記障害物の最大外形に関する情報を抽出し、垂直方向と直交する方向への前記障害物の前記最大外形に関する情報と、前記障害物の位置情報と、を含む前記経路計画用地図を生成する地図生成部とを備えて構成する。」なる地図提供システムで改善していた。
【先行技術文献】
【特許文献】
【0008】
特開2022-171210号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、特許文献1の明細書の段落0017で「地図提供サーバ200は、建物BL内の3次元地図を記憶している。建物BL内の3次元地図は、例えば事前に作成されたものであり、単に地図と記載しているものの地図情報である。」と、事前に作成した3次元地図が必須であると説明しているにも拘わらず、同文献では、3次元地図の具体的な作成方法の開示がなく、また、事前に作成した3次元地図と現場環境が齟齬する場合に必然的に発生する自律移動装置の制御不良の改善方法については一切説明がなかった。
【0010】
そこで、本発明では、作業現場の3次元地図と自律移動ロボットの移動経路を安価かつ高効率に作成でき、さらに、簡易作成した3次元地図に誤差が存在しても、自律移動ロボットを適切に自律移動させることができる、ロボット制御システム、および、ロボット制御方法を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
3日前
村田機械株式会社
産業機械
17日前
神港テクノス株式会社
制御装置
2か月前
株式会社ダイヘン
移動体
2か月前
株式会社ダイヘン
移動体
2か月前
トヨタ自動車株式会社
自律移動体
17日前
株式会社クボタ
作業車
17日前
トヨタ自動車株式会社
配送システム
1か月前
株式会社フジキン
流体制御装置
1か月前
株式会社明電舎
車両
17日前
アズビル株式会社
パラメータ調整装置
26日前
トヨタ自動車株式会社
ロボットシステム
25日前
株式会社村田製作所
温度補償回路
3日前
株式会社ダイフク
搬送設備
4日前
トヨタ自動車株式会社
ロボットシステム
17日前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
4日前
ローム株式会社
電源回路
1か月前
キヤノン株式会社
情報処理装置
25日前
株式会社ダイフク
物品搬送設備
4日前
株式会社ダイフク
物品搬送設備
10日前
ローム株式会社
電源回路
1か月前
トヨタ自動車株式会社
群制御システム及び方法
1か月前
旭精機工業株式会社
監視データ処理装置
11日前
東フロコーポレーション株式会社
流量制御装置
1か月前
村田機械株式会社
搬送車システム
2か月前
ブラザー工業株式会社
数値制御装置及び工作機械
17日前
株式会社ダイフク
情報表示システム
1か月前
ローム株式会社
リニア電源
2か月前
ローム株式会社
リニア電源
2か月前
株式会社日立製作所
移動体制御システム
1か月前
ローム株式会社
放電回路および電源システム
2か月前
株式会社ディスコ
搬送車
25日前
花王株式会社
物品の製造方法
1か月前
ローム株式会社
定電圧生成回路
17日前
ローム株式会社
定電圧生成回路
19日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ