TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024178851
公報種別
公開特許公報(A)
公開日
2024-12-25
出願番号
2023097319
出願日
2023-06-13
発明の名称
LiDARシステム及び制御装置
出願人
株式会社小糸製作所
代理人
個人
主分類
G01S
17/66 20060101AFI20241218BHJP(測定;試験)
要約
【課題】移動体を適切に追跡し得るLiDARシステム及び制御装置を提供する。
【解決手段】
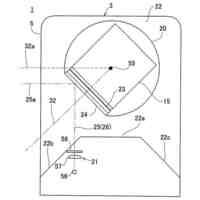
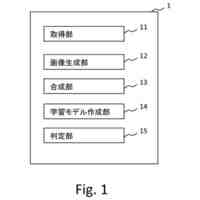
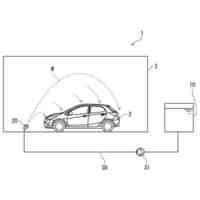
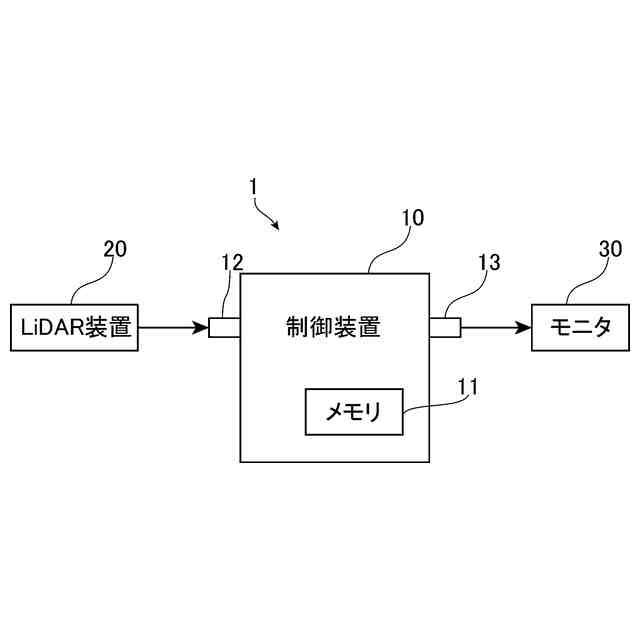
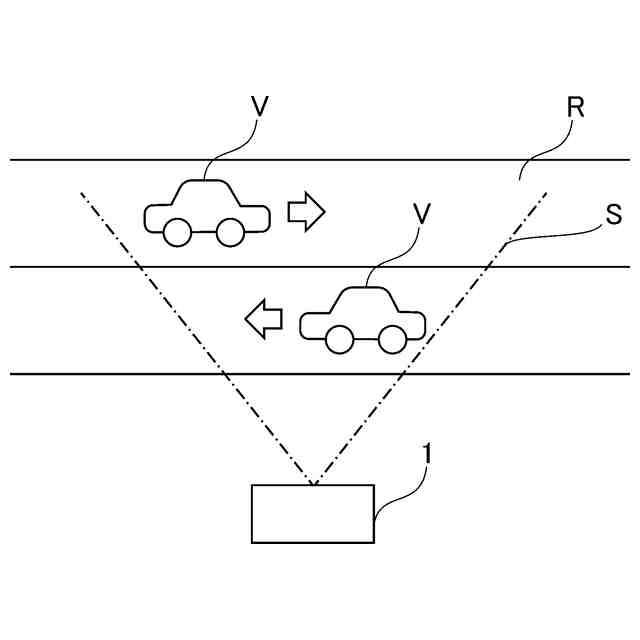
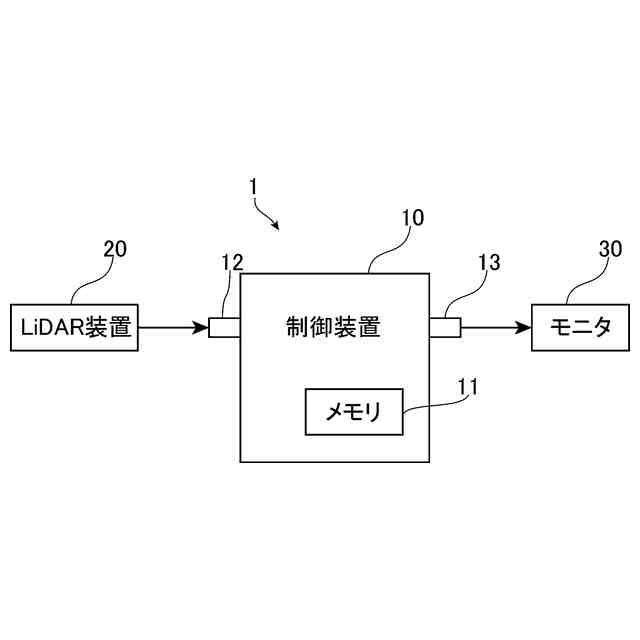
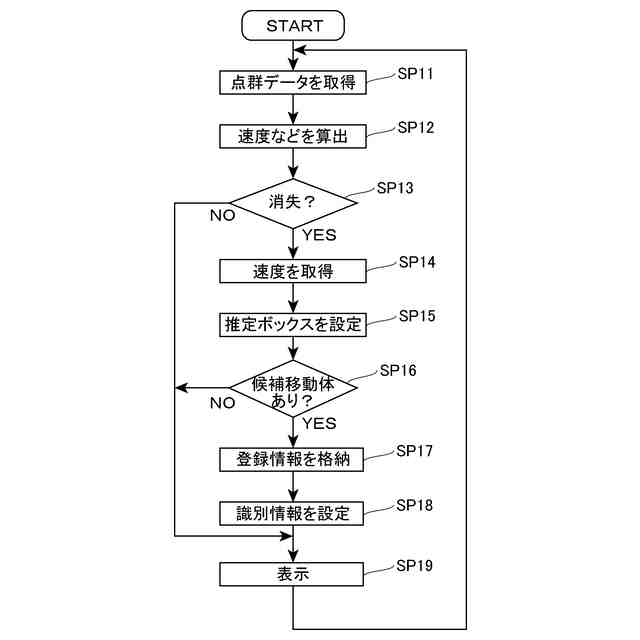
LiDARシステム1は、所定の測定領域Sにおいて物体までの距離を測定して得られる点群データに係る信号を供給するLiDAR装置20と、制御装置10と、を備え、前記制御装置10は、前記点群データから第1移動体を検出し、前記第1移動体に前記第1移動体を識別する第1識別情報を設定し、前記第1移動体が検出される第1フレーム以前のフレームにおける前記第1移動体の位置に基づいて、前記第1フレームより後であり前記第1移動体が消失している第2フレームにおける前記第1移動体の推定位置を算出し、前記第2フレームにおける前記推定位置に基づく所定の範囲に第2移動体を検出する場合、前記第2移動体に前記第1識別情報を設定する。
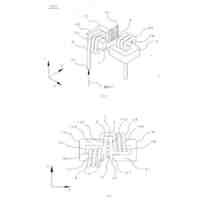
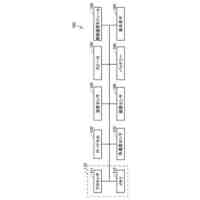
【選択図】図2
特許請求の範囲
【請求項1】
所定の測定領域において物体までの距離を測定して得られる点群データに係る信号を供給するLiDAR装置と、
制御装置と、
を備え、
前記制御装置は、
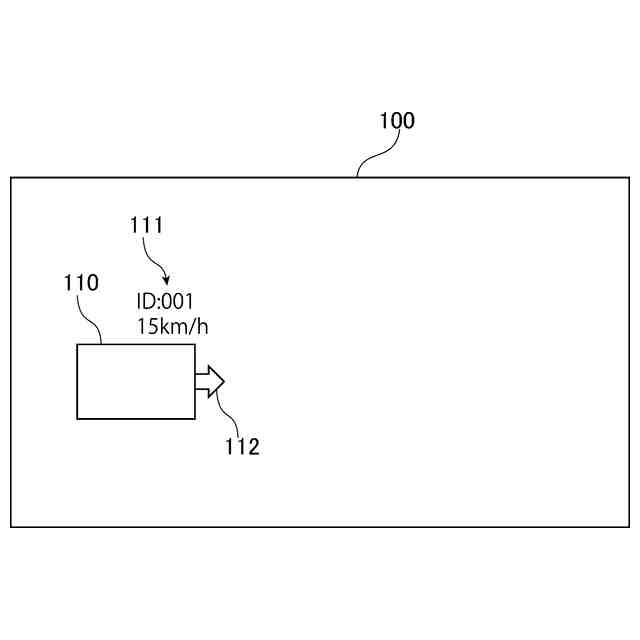
前記点群データから第1移動体を検出し、前記第1移動体に前記第1移動体を識別する第1識別情報を設定し、
前記第1移動体が検出される第1フレーム以前のフレームにおける前記第1移動体の位置に基づいて、前記第1フレームより後であり前記第1移動体が消失している第2フレームにおける前記第1移動体の推定位置を算出し、
前記第2フレームにおける前記推定位置に基づく所定の範囲に第2移動体を検出する場合、前記第2移動体に前記第1識別情報を設定する
LiDARシステム。
続きを表示(約 1,200 文字)
【請求項2】
前記制御装置は、
前記第1移動体の第1バウンディングボックスと前記第2移動体の第2バウンディングボックスとを設定し、
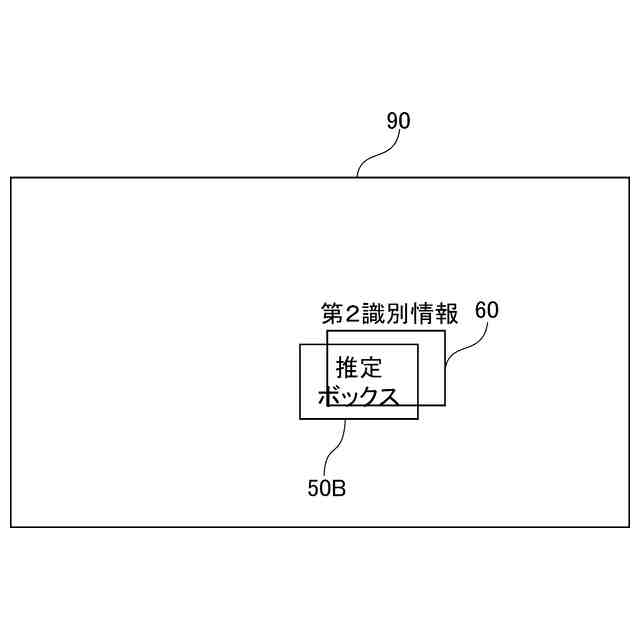
前記第2フレームにおいて、前記推定位置に前記第1バウンディングボックスに対応する推定ボックスを設定し、設定される前記推定ボックスと前記第2バウンディングボックスとが重なる面積が所定の閾値以上である場合、前記第2移動体に前記第1識別情報を設定する
請求項1に記載のLiDARシステム。
【請求項3】
前記制御装置は、前記第1フレームと前記第2フレームとの間の時間が長いほど前記第2フレームにおいて前記推定ボックスを拡大する
請求項2に記載のLiDARシステム。
【請求項4】
前記制御装置は、前記第2フレームにおいて前記所定の範囲に前記第2移動体を検出し、前記推定ボックスの面積と前記第2バウンディングボックスとの面積の差が所定の閾値以下である場合、前記第2移動体に前記第1識別情報を設定する
請求項2に記載のLiDARシステム。
【請求項5】
前記第2フレームに設定される前記推定ボックスは、複数のフレームにおける前記第1バウンディングボックスの中で最大のバウンディングボックスと概ね同一である
請求項4に記載のLiDARシステム。
【請求項6】
前記制御装置は、前記第2フレームにおいて前記推定位置と前記第2移動体の位置との距離が所定の閾値以下である場合、前記第2移動体に前記第1識別情報を設定する
請求項1に記載のLiDARシステム。
【請求項7】
前記制御装置は、
前記第1移動体が消失するフレームよりも2以上の所定の個数以前のフレームにおける前記第1移動体の位置に基づいて前記第1移動体の速度及び移動方向を算出し、
前記第1移動体の速度及び移動方向に基づいて前記推定位置を算出する
請求項1に記載のLiDARシステム。
【請求項8】
前記制御装置は、前記第2フレームにおいて前記所定の範囲に前記第2移動体を検出し、前記第1移動体の速度と前記第2移動体の速度との差が所定の閾値以下である場合、前記第2移動体に前記第1識別情報を設定する
請求項1に記載のLiDARシステム。
【請求項9】
前記第2移動体の速度は、前記第2移動体が検出されたフレームよりも2以上の所定の個数以後のフレームにおける前記第2移動体の位置から算出される
請求項8に記載のLiDARシステム。
【請求項10】
前記制御装置は、前記第2フレームにおいて前記所定の範囲に第2移動体を検出し、前記第1移動体の移動方向と前記第2移動体の移動方向とがなす角が所定の閾値以下である場合、前記第2移動体に前記第1識別情報を設定する
請求項1に記載のLiDARシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、LiDARシステム及び制御装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
LiDAR(Light Detection And Ranging)装置を用いて3次元的に検出された点群データを取得し、取得された点群データから移動体を検出するシステムが提供されている。そのようなシステムは、複数のフレームにおいて移動体を検出した場合、各フレームにおける移動体を特定し追跡する。下記特許文献1にはそのようなシステムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-170241号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、移動体とLiDAR装置との間に存在する障害物や点群データのノイズの影響などにより、前のフレームで検出されていた移動体が後続する数フレームの間に消失することがある。移動体が再出現しても、消失前の移動体と再出現した移動体との距離が離れている場合などでは両者を同定することができず移動体の追跡に失敗する可能性がある。
【0005】
そこで、本発明は、移動体を適切に追跡し得るLiDARシステム及び制御装置を提供する。
【課題を解決するための手段】
【0006】
上記の目的の達成のため、本発明のLiDARシステムは、所定の測定領域において物体までの距離を測定して得られる点群データに係る信号を供給するLiDAR装置と、制御装置と、を備え、前記制御装置は、前記点群データから第1移動体を検出し、前記第1移動体に前記第1移動体を識別する第1識別情報を設定し、前記第1移動体が検出される第1フレーム以前のフレームにおける前記第1移動体の位置に基づいて、前記第1フレームより後であり前記第1移動体が消失している第2フレームにおける前記第1移動体の推定位置を算出し、前記第2フレームにおける前記推定位置に基づく所定の範囲に第2移動体を検出する場合、前記第2移動体に前記第1識別情報を設定する。
【0007】
上記LiDARシステムは、第1フレーム以前のフレームにおける第1移動体の位置に基づいて第2フレームにおける第1移動体の推定位置を算出する。また、上記LiDARシステムは、推定位置に基づく所定の範囲に検出された第2移動体に第1移動体の第1識別情報を設定する。そのため、上記LiDARシステムは、第1移動体が消失した後に第2移動体として再出現した第1移動体に第1識別情報を設定し得る。よって、上記LiDARシステムは、消失前の第1移動体と再出現した第1移動体とを適切に同定し第1移動体を適切に追跡し得る。
【0008】
また、上記LiDARシステムにおいて、前記制御装置は、前記第1移動体の第1バウンディングボックスと前記第2移動体の第2バウンディングボックスとを設定し、前記第2フレームにおいて、前記推定位置に前記第1バウンディングボックスに対応する推定ボックスを設定し、設定される前記推定ボックスと前記第2バウンディングボックスとが重なる面積が所定の閾値以上である場合、前記第2移動体に前記第1識別情報を設定してもよい。
【0009】
また、上記LiDARシステムにおいて、前記制御装置は、前記第1フレームと前記第2フレームとの間の時間が長いほど前記第2フレームにおいて前記推定ボックスを拡大してもよい。
【0010】
このような構成により、上記LiDARシステムは、第1移動体が消失してから時間が経過するほど推定ボックスを拡大する。したがって、時間が経過すると共に、所定の範囲は、拡大する。よって、現実の第1移動体の位置と推定位置とのずれが時間の経過と共に拡大しても、再出現した第1移動体が所定の範囲に第2移動体として含まれる。そのため、上記LiDARシステムは、現実の第1移動体の位置と推定位置とのずれが時間の経過により拡大しても、再出現した第1移動体を所定の範囲を第2移動体として検出し得る。ゆえに、上記LiDARシステムは、第1移動体の消失から再出現までの時間が長くとも、消失前の第1移動体と再出現した第1移動体とを適切に同定し第1移動体を適切に追跡し得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
甲神電機株式会社
電流センサ
9日前
日本精機株式会社
車両用計器
1日前
個人
シート形状体温計
26日前
株式会社大真空
センサ
3日前
株式会社大真空
センサ
23日前
日本精機株式会社
コントローラ
11日前
CKD株式会社
検査装置
1日前
株式会社トプコン
測量装置
1日前
株式会社トプコン
測量装置
1日前
日本電波工業株式会社
風速測定装置
23日前
株式会社チノー
液浸プローブ
25日前
株式会社国際電気
治具セット
1日前
トヨタ自動車株式会社
解析装置
23日前
三菱重工冷熱株式会社
降雨装置
11日前
株式会社デンソー
検出装置
11日前
株式会社豊田自動織機
車両
25日前
ローム株式会社
半導体装置
10日前
日本特殊陶業株式会社
ガスセンサ
9日前
シャープ株式会社
測定装置
1日前
株式会社ジェイテクト
荷重付与装置
1日前
株式会社ピーエムティー
検査ゲージ
23日前
個人
コンベックスルール用の計測補助用具
23日前
株式会社ジークエスト
感温センサー
9日前
株式会社ミツトヨ
目盛板姿勢検査方法
1日前
株式会社チノー
耐熱配管および測定システム
2日前
有限会社巧機工
冷凍物打撃装置
1日前
横河電機株式会社
流路装置
9日前
株式会社クオルテック
試験装置および試験方法
9日前
TDK株式会社
温度センサ
3日前
大同特殊鋼株式会社
超音波欠陥検出方法
9日前
エスペック株式会社
二次電池用プローブ
1日前
TDK株式会社
温度センサ
9日前
株式会社小糸製作所
サイドミラーユニット
9日前
ホシデン株式会社
センサ装置
25日前
矢崎総業株式会社
センサ部品
1日前
ヒロセ電機株式会社
磁気センサ装置
9日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ