TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024177023
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023181507,2023095911
出願日
2023-10-21,2023-06-09
発明の名称
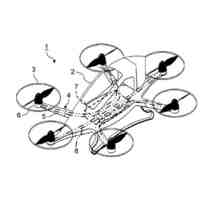
無人飛行体制御システム
出願人
株式会社山進
代理人
個人
主分類
B64U
10/14 20230101AFI20241212BHJP(航空機;飛行;宇宙工学)
要約
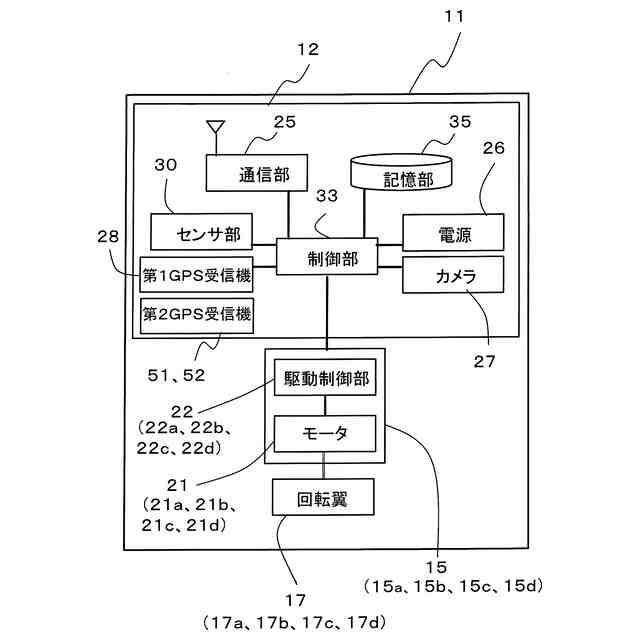
【課題】1台の人工衛星からの電波を受信するGPS受信機を2個有している無人飛行体操縦システムの提供。
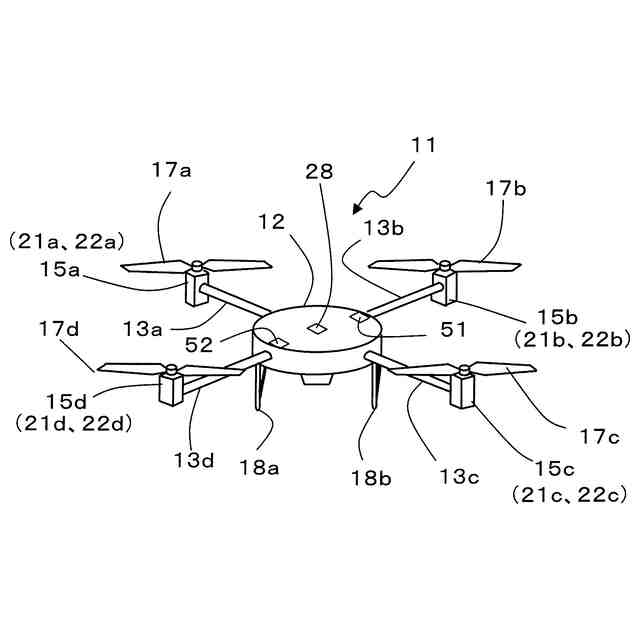
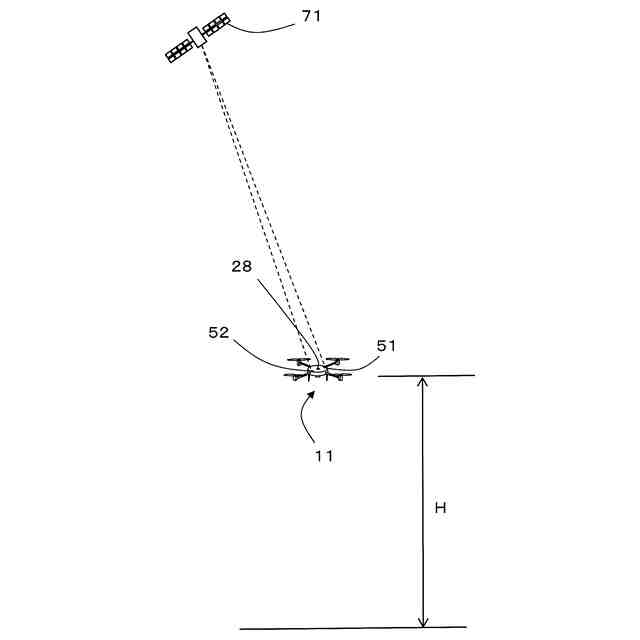
【解決手段】無人飛行体と遠隔操縦する操縦端末31と、操作指示により無人飛行体及び操縦端末31を制御する制御部とを有する無人飛行体制御システムで、無人飛行体は、1台の人工衛星からの電波を受信するGPS受信機51、52を2個有し、飛行経路の途中である所定位置の位置情報を取得する位置情報取得手段を有し、位置情報取得手段は、GPS受信機51、52の計測値に基づいて無人飛行体の位置情報を取得する。
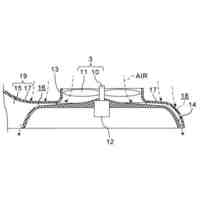
【選択図】図2
特許請求の範囲
【請求項1】
無人飛行体と、該無人飛行体を遠隔操縦する操縦端末と、操作指示に基づき前記無人飛行体及び前記操縦端末を制御する制御部と、を有する無人飛行体制御システムであって、
前記無人飛行体は、
1台の人工衛星からの電波を受信するGPS受信機を2個有し、
飛行経路の途中である所定位置の位置情報を取得する位置情報取得手段を有し、
前記位置情報取得手段は、前記GPS受信機の計測値に基づいて前記無人飛行体の位置情報を取得する、無人飛行体制御システム。
続きを表示(約 250 文字)
【請求項2】
前記無人飛行体は、少なくとも4台の人工衛星からの電波を受信するその他のGPS受信機を有し、
前記位置情報取得手段は、前記その他のGPS受信機の計測値基づいて前記位置情報を取得する、請求項1に記載の無人飛行体制御システム。
【請求項3】
前記位置情報取得手段は、前記その他のGPS受信機の計測値又は2個の前記GPS受信機の計測値及び前記無人飛行体に搭載されるセンサの計測値に基づいて前記位置情報を取得する、請求項2に記載の無人飛行体制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、無人飛行体の遠隔操縦の引き継ぎを行う無人飛行体制御システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
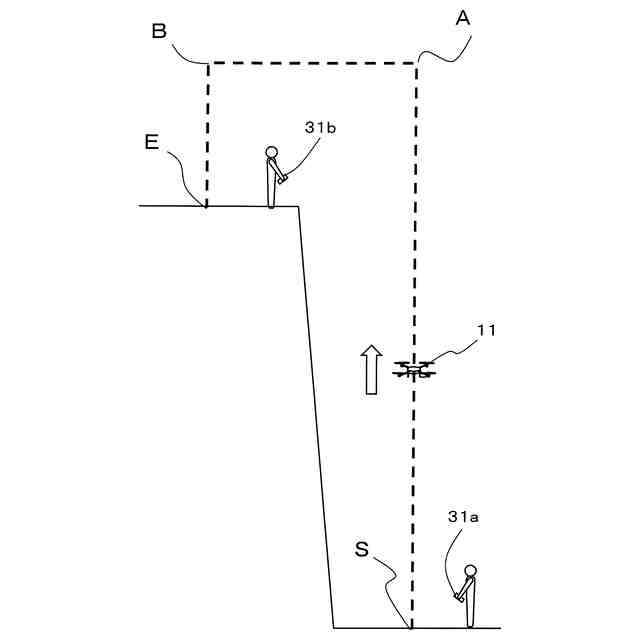
コントローラ等の操縦端末により操縦される無人飛行体(ドローン)は、建築資材、工具等の比較的重量のある荷物運搬にも利用されており、スタート地点から目的地までの距離が長く、例えば全運行行程の視界の確保が難しい山岳、森林地帯の場合には、運行途中において他者に操縦の引き継ぎが行われている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2017-74826
【発明の概要】
【発明が解決しようとする課題】
【0004】
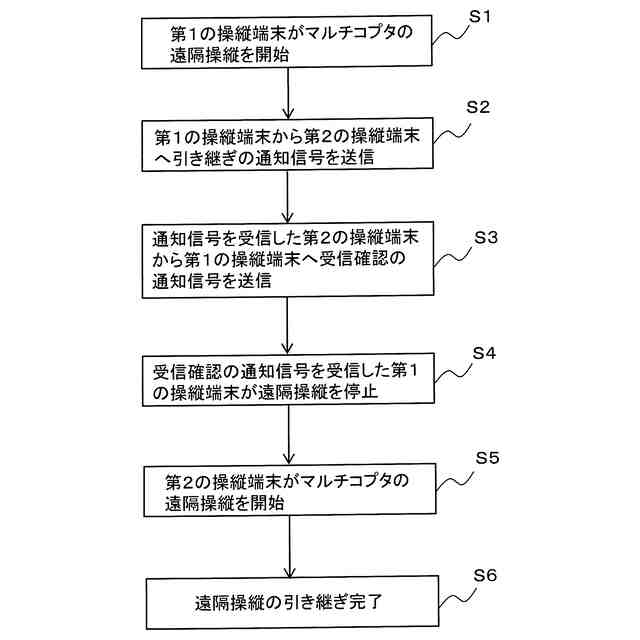
特許文献1によれば、一の操縦端末からの飛行制御信号を受信しなくなったときに、無人飛行体をホバリング状態にし、その後他の操縦端末からの飛行制御信号の受信によりホバリングを解除して飛行状態に移行することで引き継ぎを行うとされているが、一の操縦端末と他の操縦端末を操縦する者同士の間で引き継ぎ時の連絡を別途行う必要がある。しかしながら、特許文献1では引き継ぎ時期の連絡については何ら言及されていない。円滑な引き継ぎを行うためには、操縦者相互間の簡便かつ迅速な連絡が必要とされる。また、無人飛行体の位置情報については、従来から、GPS受信機を用いているが、複数の人工衛星から電波を受信する必要があった。
【0005】
本発明が解決しようとする課題は、1台の人工衛星からの電波で無人飛行体の位置情報を取得することを可能にした無人飛行体操縦システムの提供をすることにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明に係る無人飛行体制御システムは、無人飛行体と、該無人飛行体を遠隔操縦する操縦端末と、操作指示に基づき前記無人飛行体及び前記操縦端末を制御する制御部と、を有する無人飛行体制御システムであって、前記無人飛行体は、1台の人工衛星からの電波を受信するGPS受信機を2個有し、飛行経路の途中である所定位置の位置情報を取得する位置情報取得手段を有し、前記位置情報取得手段は、前記GPS受信機の計測値に基づいて前記無人飛行体の位置情報を取得する、構成である。
【0007】
このような構成によれば、1台の人工衛星からの電波を受信するGPS受信機を2個有しているので、無人飛行体の位置情報の取得に際して簡便な構造のGPS受信機の使用が可能となる。
【0008】
本発明に係る無人飛行体制御システムにおいて、少なくとも4台の人工衛星からの電波を受信するその他のGPS受信機を有し、 前記位置情報取得手段は、前記その他のGPS受信機の計測値基づいて前記位置情報を取得する、構成とすることができる。
【0009】
このような構成によれば、4台の人工衛星からの電波を受信するその他のGPS受信機の計測値で位置情報を取得するので、位置情報の取得に際して簡便な構造のGPS受信機とその他のGPS受信機の使用を可能とするものである。
【0010】
本発明に係る無人飛行体制御システムにおいて、前記位置情報取得手段は、前記その他のGPS受信機の計測値又は2個の前記GPS受信機の計測値及び前記無人飛行体に搭載されるセンサの計測値に基づいて前記位置情報を取得する、
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ドローン
1か月前
個人
ドローンシステム
2か月前
個人
空港用貨物搬送車
10か月前
個人
陸海空用の乗り物
2日前
株式会社三圓
浮上装置
7か月前
個人
ドローンの計測操作方法2
7か月前
個人
ドローンの計測操作方法3
7か月前
個人
垂直離着陸機用エンジン改
2か月前
個人
飛行艇
9か月前
キヤノン電子株式会社
磁気トルカ
8か月前
個人
人工衛星推進材循環エンジン
11か月前
個人
空中移動システム
4か月前
個人
ドローン消音装置
5か月前
個人
ドローンを自動離着陸する方法
3か月前
トヨタ自動車株式会社
ドローン
27日前
個人
エアライナー全自動パラシュート
1か月前
株式会社中北製作所
羽ばたき装置
11か月前
株式会社セネック
ドローンポート
10か月前
合同会社アドエア
飛行体の落下補助装置
4か月前
株式会社セネック
ドローンポート
10か月前
株式会社ACSL
システム
1か月前
株式会社ACSL
システム
1か月前
株式会社中北製作所
羽ばたき装置
11か月前
株式会社SUBARU
電動航空機
11か月前
合同会社アドエア
パラシュート射出装置
1か月前
株式会社SUBARU
移動体
4か月前
個人
垂直離着陸機用ガスタービンエンジン
2か月前
株式会社SUBARU
回転翼航空機
11か月前
全日本空輸株式会社
ドーリシステム
6か月前
ミネベアミツミ株式会社
無人機
26日前
ミネベアミツミ株式会社
無人機
26日前
HDサービス合同会社
カメラ装着装置
5か月前
株式会社SUBARU
構造体の製造方法
7か月前
株式会社SUBARU
構造体の製造方法
7か月前
本田技研工業株式会社
移動体
8か月前
株式会社デンソー
推進装置
8か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ