TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024176817
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023095634
出願日
2023-06-09
発明の名称
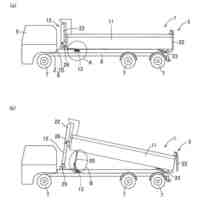
産業車両
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
B60L
15/20 20060101AFI20241212BHJP(車両一般)
要約
【課題】走行モータの回転数を目標回転数に円滑に追従させること。
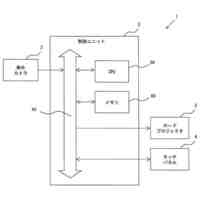
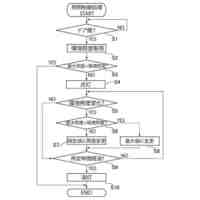
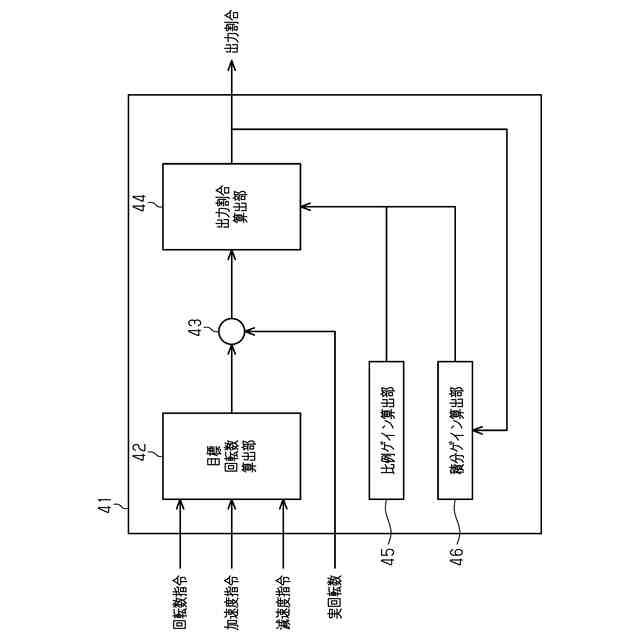
【解決手段】産業車両は、走行モータと、走行モータを駆動させるインバータと、インバータを制御する制御装置と、を備える。制御装置は、走行モータの回転数と目標回転数との偏差を算出する。制御装置は、走行モータの回転数と目標回転数との偏差、比例ゲイン、及び積分ゲインに基づいて出力割合を算出する。制御装置は、出力割合とトルク電流曲線とを掛け合わせることでトルク電流指令値を算出する。制御装置は、トルク電流指令値をインバータに対する指令値に変換することでモータの回転数が目標回転数に追従するように走行モータを制御する。制御装置は、産業車両の制動時に、回転数が基底回転数以下の状態での出力割合の最大値に基づき積分ゲインを設定する。
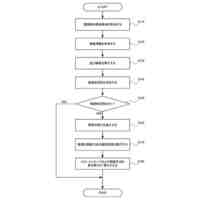
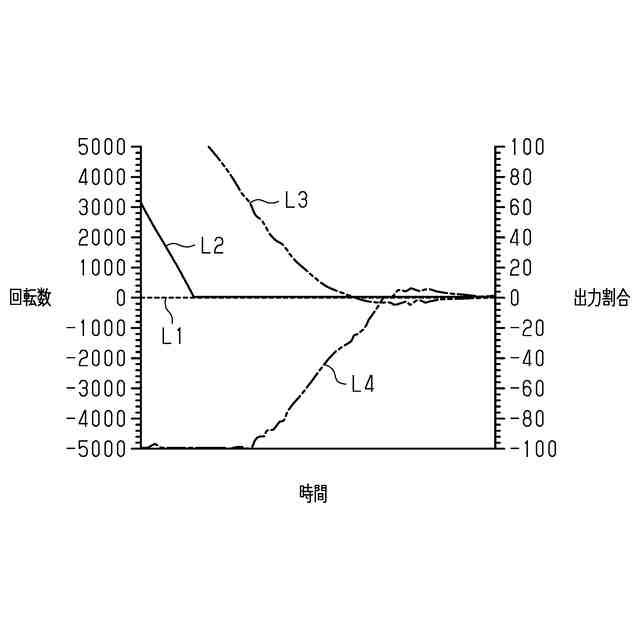
【選択図】図5
特許請求の範囲
【請求項1】
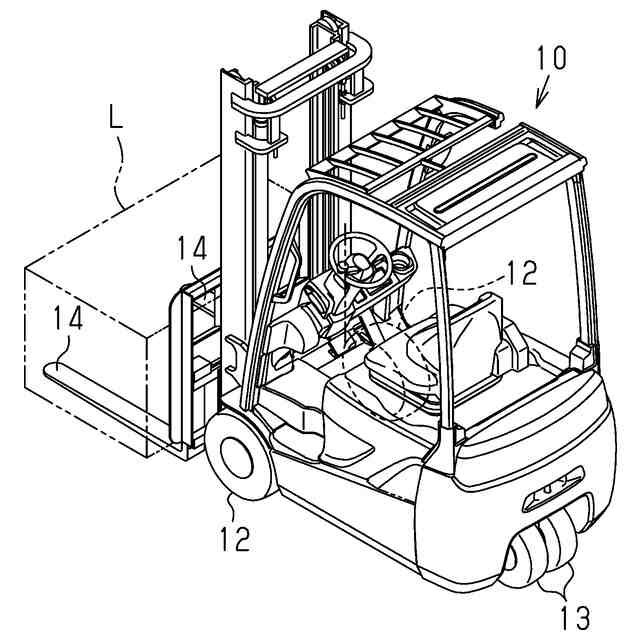
荷を搬送可能な産業車両であって、
走行モータと、
前記走行モータを駆動させるインバータと、
前記インバータを制御する制御装置と、を備え、
前記制御装置は、
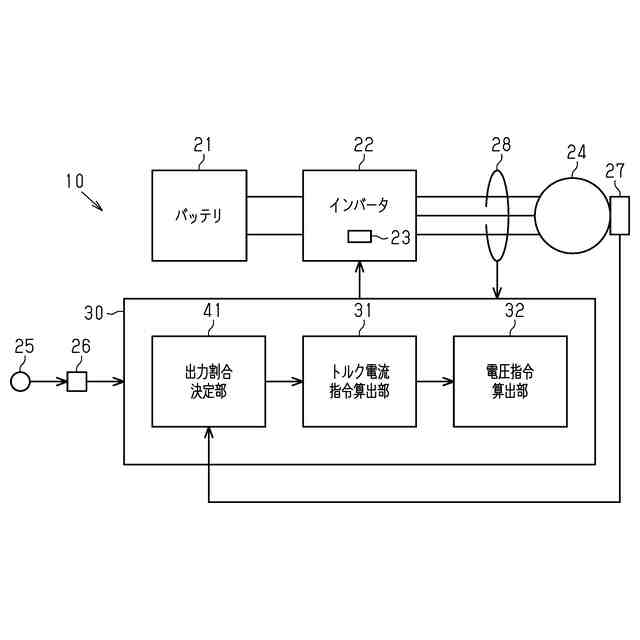
前記走行モータの回転数と目標回転数との偏差を算出し、
前記偏差、比例ゲイン、及び積分ゲインに基づいて出力割合を算出し、
前記出力割合とトルク電流曲線とを掛け合わせることでトルク電流指令値を算出し、
前記トルク電流指令値を前記インバータに対する指令値に変換することで前記走行モータの回転数が前記目標回転数に追従するように前記走行モータを制御し、
前記産業車両の制動時に、前記走行モータの回転数が基底回転数以下の状態での前記出力割合の最大値に基づき前記積分ゲインを設定する、産業車両。
続きを表示(約 800 文字)
【請求項2】
前記制御装置は、
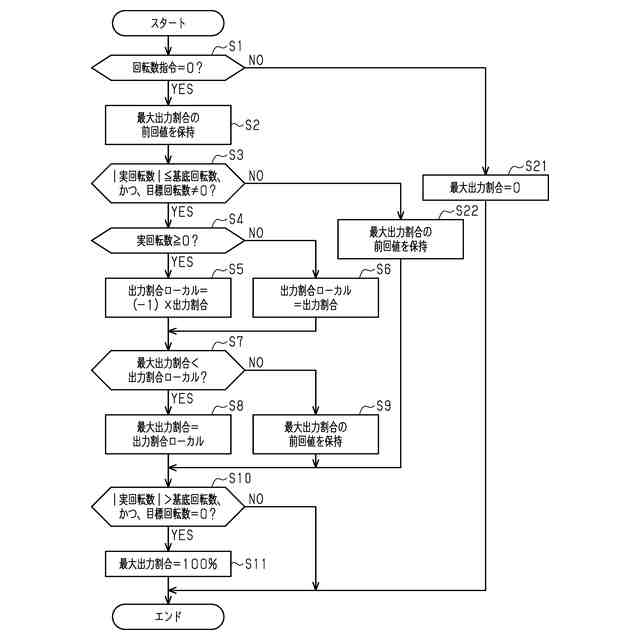
前記走行モータの回転数が前記基底回転数以下に維持されている間に算出された前記最大値を保持しており、
前記走行モータの回転数が前記基底回転数以下に維持されている間に前記出力割合が算出されると、算出された前記出力割合が保持された前記最大値よりも大きい場合に、算出された前記出力割合を新たな前記最大値として保持する、請求項1に記載の産業車両。
【請求項3】
前記制御装置は、
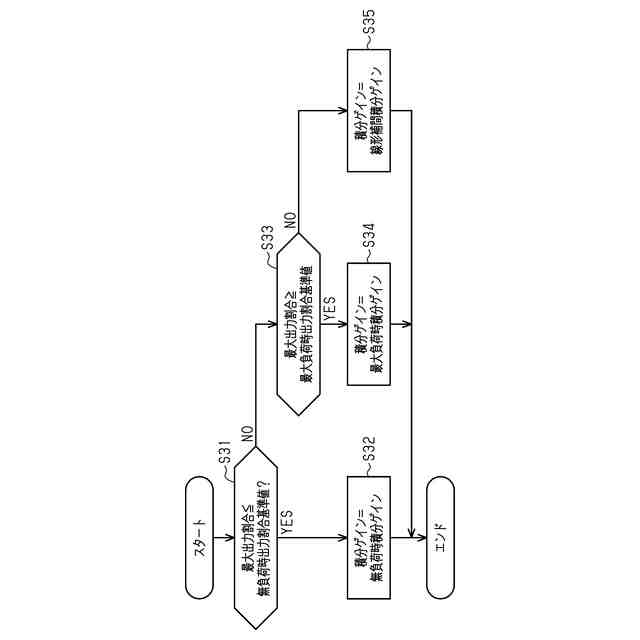
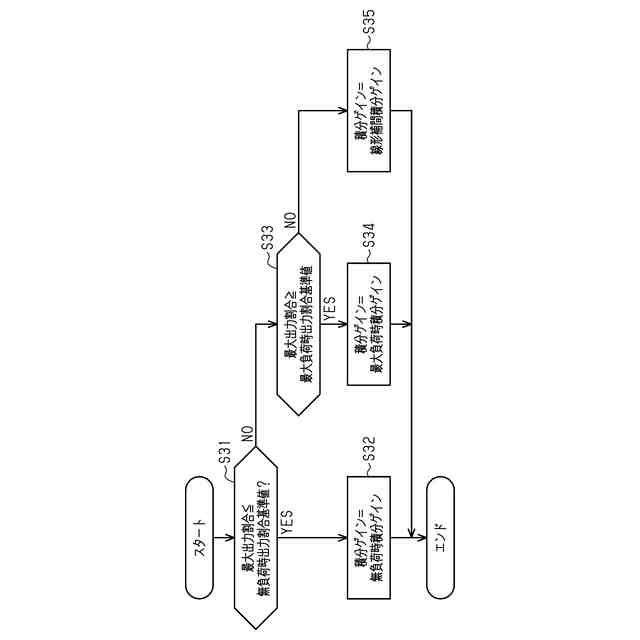
前記最大値が無負荷時出力割合基準値以下の場合、前記積分ゲインとして無負荷時積分ゲインを設定し、
前記最大値が最大負荷時出力割合基準値以上の場合、前記積分ゲインとして最大負荷時積分ゲインを設定し、
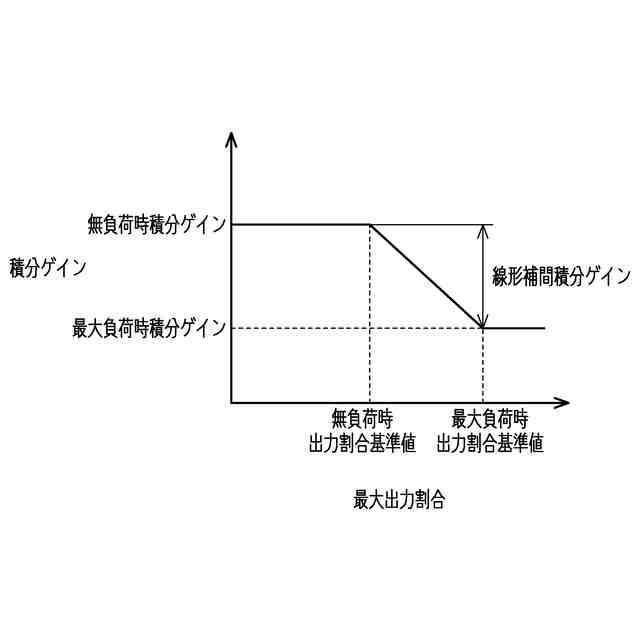
前記最大値が前記無負荷時出力割合基準値より大きく、前記最大負荷時出力割合基準値より小さい場合、前記積分ゲインとして前記無負荷時積分ゲインと前記最大負荷時積分ゲインとの間を線形補間することで得られた線形補間積分ゲインを設定し、
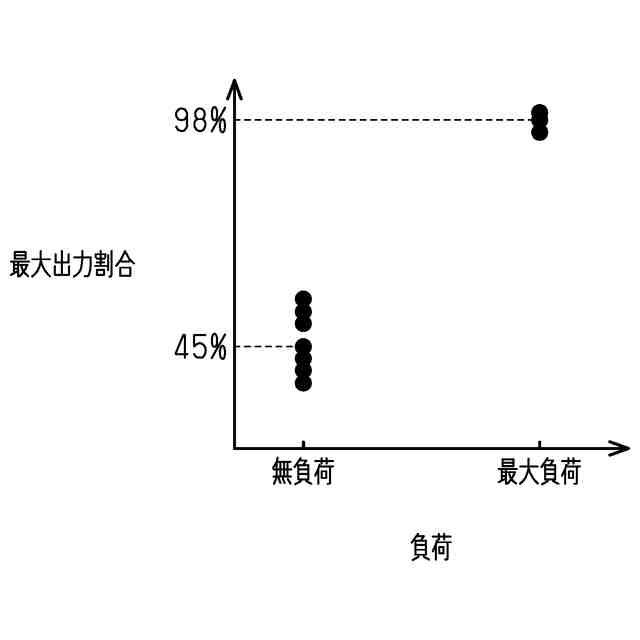
前記無負荷時出力割合基準値は、前記産業車両が前記荷を搬送していない場合に前記最大値が前記無負荷時出力割合基準値以下となるように設定されており、
前記最大負荷時出力割合基準値は、前記産業車両が搬送し得る最大重量の前記荷を搬送している場合に前記最大値が前記最大負荷時出力割合基準値以上となるように設定されている、請求項1又は請求項2に記載の産業車両。
【請求項4】
前記最大値が取り得る範囲を複数に区分した区分毎に前記積分ゲインが対応付けられており、
前記制御装置は、前記最大値が属する区分に対応付けられた前記積分ゲインを設定する、請求項1又は請求項2に記載の産業車両。
【請求項5】
制動装置として前記走行モータのみを備える、請求項1又は請求項2に記載の産業車両。
発明の詳細な説明
【技術分野】
【0001】
本開示は、産業車両に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1に開示の車両は、走行モータと、走行モータを駆動させるインバータと、インバータを制御する制御装置と、を備える。制御装置は、走行モータの力行によって車両を走行させる。制御装置は、走行モータの回生によって車両を制動させる。制御装置が走行モータの回生によって車両を制動させる際には、走行モータの回転数が目標回転数に追従するようにフィードバック制御を行う。フィードバック制御は、例えば、比例積分制御である。特許文献2に開示の産業車両は、荷を搬送する。
【先行技術文献】
【特許文献】
【0003】
特開2020-68596号公報
特開2023-46547号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示のようにフィードバック制御を行う場合、比例ゲイン、及び積分ゲインが設定される。そして、比例ゲイン及び積分ゲインに基づいて制御が行われることで走行モータの回転数が目標回転数に追従する。特許文献1と同様に産業車両を制御する際の積分ゲインを設定する場合、産業車両を停止させる際の積分ゲインは、荷を搬送していない状態で走行モータの回転数が目標回転数に円滑に追従するように設定される。この場合、荷を搬送している産業車両を停止させる際に、走行モータの回転数が目標回転数に円滑に追従しない場合がある。
【課題を解決するための手段】
【0005】
上記課題を解決する産業車両は、荷を搬送可能な産業車両であって、走行モータと、前記走行モータを駆動させるインバータと、前記インバータを制御する制御装置と、を備え、前記制御装置は、前記走行モータの回転数と目標回転数との偏差を算出し、前記偏差、比例ゲイン、及び積分ゲインに基づいて出力割合を算出し、前記出力割合とトルク電流曲線とを掛け合わせることでトルク電流指令値を算出し、前記トルク電流指令値を前記インバータに対する指令値に変換することで前記走行モータの回転数が前記目標回転数に追従するように前記走行モータを制御し、前記産業車両の制動時に、前記走行モータの回転数が基底回転数以下の状態での前記出力割合の最大値に基づき前記積分ゲインを設定する。
【0006】
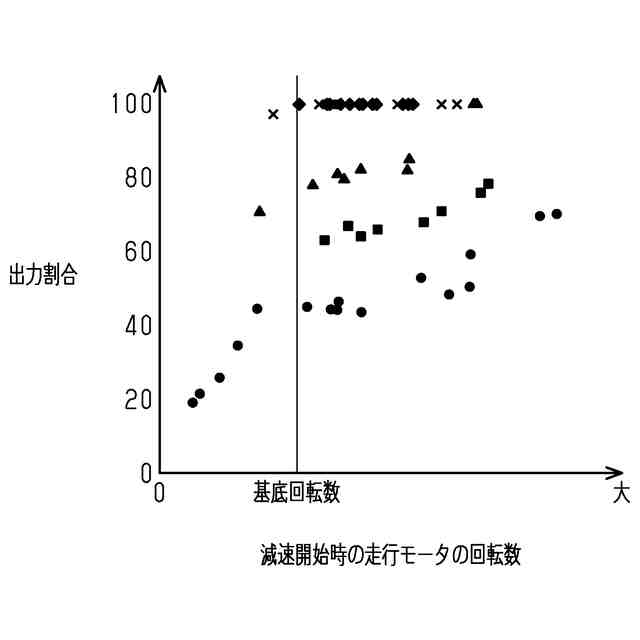
走行モータの回転数が基底回転数以下の状態では、荷の重量に応じて出力割合の最大値が変化する。このため、走行モータの回転数が基底回転数以下の状態での出力割合の最大値に基づき積分ゲインを設定することで、荷の重量に応じた積分ゲインを設定することができる。この積分ゲインによって出力割合を算出することによって、産業車両を停止させる際に、走行モータの回転数を目標回転数に円滑に追従させることができる。
【0007】
上記産業車両について、前記制御装置は、前記走行モータの回転数が前記基底回転数以下に維持されている間に算出された前記最大値を保持しており、前記走行モータの回転数が前記基底回転数以下に維持されている間に前記出力割合が算出されると、算出された前記出力割合が保持された前記最大値よりも大きい場合に、算出された前記出力割合を新たな前記最大値として保持してもよい。
【0008】
上記産業車両について、前記制御装置は、前記最大値が無負荷時出力割合基準値以下の場合、前記積分ゲインとして無負荷時積分ゲインを設定し、前記最大値が最大負荷時出力割合基準値以上の場合、前記積分ゲインとして最大負荷時積分ゲインを設定し、前記最大値が前記無負荷時出力割合基準値より大きく、前記最大負荷時出力割合基準値より小さい場合、前記積分ゲインとして前記無負荷時積分ゲインと前記最大負荷時積分ゲインとの間を線形補間することで得られた線形補間積分ゲインを設定し、前記無負荷時出力割合基準値は、前記産業車両が荷を搬送していない場合に前記最大値が前記無負荷時出力割合基準値以下となるように設定されており、前記最大負荷時出力割合基準値は、前記産業車両が搬送し得る最大重量の前記荷を搬送している場合に前記最大値が前記最大負荷時出力割合基準値以上となるように設定されていてもよい。
【0009】
上記産業車両について、前記最大値が取り得る範囲を複数に区分した区分毎に前記積分ゲインが対応付けられており、前記制御装置は、前記最大値が属する区分に対応付けられた前記積分ゲインを設定してもよい。
【0010】
上記産業車両について、制動装置として前記走行モータのみを備えていてもよい。
【発明の効果】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
飛行自動車
1か月前
日本精機株式会社
表示装置
25日前
日本精機株式会社
照明装置
24日前
日本精機株式会社
表示装置
5日前
日本精機株式会社
表示装置
5日前
日本精機株式会社
表示装置
2か月前
個人
アンチロール制御装置
12日前
日本精機株式会社
表示装置
25日前
日本精機株式会社
表示装置
25日前
日本精機株式会社
表示装置
24日前
個人
ブレーキシステム
3日前
株式会社松華
懸架装置
24日前
横浜ゴム株式会社
タイヤ
2日前
個人
自走式立体型洗車場
20日前
個人
ステージカー
24日前
日本精機株式会社
車両用表示装置
25日前
日本精機株式会社
車両用表示装置
25日前
マツダ株式会社
車両
1か月前
株式会社ユーシン
照明装置
5日前
日本精機株式会社
車両用表示装置
24日前
井関農機株式会社
作業車両
10日前
マツダ株式会社
車両
1か月前
日本精機株式会社
車両用照明装置
1か月前
個人
農業機械への架線給電システム
16日前
コイト電工株式会社
座席装置
24日前
エムケー精工株式会社
車両処理装置
4日前
株式会社SUBARU
車載装置
19日前
株式会社クボタ
作業車両
1か月前
極東開発工業株式会社
荷役車両
3日前
株式会社クボタ
作業車両
1か月前
ダイハツ工業株式会社
車両構造
1か月前
個人
Aピラー死角エリヤ確認用ミラー
1か月前
ダイハツ工業株式会社
車両構造
1か月前
豊田合成株式会社
乗員保護装置
2か月前
株式会社小糸製作所
車両用灯具
5日前
ダイハツ工業株式会社
車両構造
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ