TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
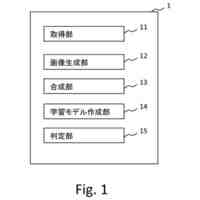
2024176227
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023094630
出願日
2023-06-08
発明の名称
三次元形状測定システム及び三次元形状測定システムの設定方法
出願人
東京貿易テクノシステム株式会社
,
大成建設株式会社
代理人
個人
,
個人
,
個人
主分類
G01C
15/00 20060101AFI20241212BHJP(測定;試験)
要約
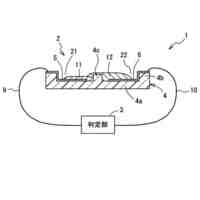
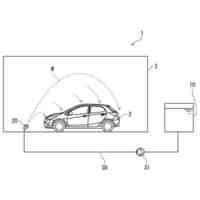
【課題】三次元形状測定器を車両の荷室部に設けた状態で、基準点計測器を基準とした三次元形状測定器の位置を取得する。
【解決手段】三次元形状測定システムは、車両において、基準点計測器から視認可能な位置に配置された第1の基準器と、三次元形状測定器を、車両の荷室内に収容した収容位置と、対象物に対する測定光の照射が可能な測定位置で位置決め可能とする位置決め機構と、三次元形状測定器の測定データと、基準点計測器を基準とした第1の基準器の座標データが入力される処理装置と、を有し、処理装置は、三次元形状測定器を基準とした第1の基準器の座標データであって予め取得した座標データと、基準点計測器で測定した第1の基準器の座標データであって、基準点計測器を基準とした第1の基準器の座標データと、に基づいて、三次元形状測定器の測定データを、基準点計測器を基準とした測定データに変換する。
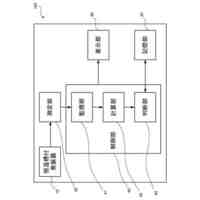
【選択図】図1
特許請求の範囲
【請求項1】
対象物に対する測定光の照射により、前記対象物の三次元形状を測定する三次元形状測定器と、
車両において、基準点計測器から視認可能な位置に配置された第1の基準器と、
前記三次元形状測定器を、前記車両の荷室内に収容した収容位置と、前記対象物に対する測定光の照射が可能で、前記第1の基準器の座標データを取得不能な測定位置で位置決め可能とする位置決め機構と、
前記三次元形状測定器の測定データと、前記基準点計測器が取得した座標データであって、前記基準点計測器を基準とした前記第1の基準器の座標データが入力される処理装置と、を有し、
前記処理装置は、前記三次元形状測定器を基準とした前記第1の基準器の座標データであって予め取得した座標データと、前記基準点計測器で測定した前記第1の基準器の座標データであって、前記基準点計測器を基準とした前記第1の基準器の座標データと、に基づいて、前記三次元形状測定器の測定データを、前記基準点計測器を基準とした測定データに変換することを特徴とする三次元形状測定システム。
続きを表示(約 1,600 文字)
【請求項2】
請求項1において、
前記第1の基準器は、前記車両のルーフ部に複数設けられており、
前記三次元形状測定器を基準とした前記第1の基準器の座標データは、前記第1の基準器毎に用意されており、
前記第1の基準器は、前記車両の幅方向と、前記車両の前後方向に間隔を空けて複数設けられていることを特徴とする三次元形状測定システム。
【請求項3】
請求項1において、
前記三次元形状測定器を基準とした前記第1の基準器の座標データは、前記処理装置の記憶部又は、外部サーバのうちの少なくとも一方に記憶されていることを特徴とする三次元形状測定システム。
【請求項4】
請求項1において、
前記位置決め機構は、前記三次元形状測定器を支持する支持台を、前記収容位置と前記測定位置の間でスライド移動させるスライド機構と、
前記支持台を、少なくとも前記測定位置に固定するロック機構と、を有することを特徴とする三次元形状測定システム。
【請求項5】
請求項4において、
前記スライド機構は、前記車両の幅方向における前記支持台の両端部に設けられた一対のスライドレールを有することを特徴とする三次元形状測定システム。
【請求項6】
請求項4において、
前記ロック機構は、前記荷室に設けられた係合部と、前記支持台に設けられていると共に、前記係合部が係合する被係合部と、を有し、
前記被係合部は、少なくとも前記車両の前後方向における前記支持台の前方側端部に設けられていることを特徴とする三次元形状測定システム。
【請求項7】
請求項1において、
前記三次元形状測定器は、レーザートラッカーであることを特徴とする三次元形状測定システム。
【請求項8】
請求項1から請求項7の内の何れか一項において、
前記処理装置は、
前記車両から離間した位置に配置した第2の基準器の座標データであって、前記車両から離間した位置に配置した他の三次元形状測定器を基準とした座標データと、
前記第2の基準器の座標データであって、前記車両に搭載した前記三次元形状測定器を基準とした座標データが入力されると、
前記他の三次元形状測定器を基準とした前記第2の基準器の座標データと、前記車両に搭載した前記三次元形状測定器を基準とした前記第2の基準器の座標データとの差分を算出し、
前記他の三次元形状測定器を基準とした前記第1の基準器の座標データから、前記差分を用いて、前記車両に搭載した前記三次元形状測定器を基準とした前記第1の基準器の座標データを算出することを特徴とする三次元形状測定システム。
【請求項9】
請求項7に記載の三次元形状測定システムの設定方法であって、
前記車両から離間した位置に前記レーザートラッカーと第2の基準器とを配置して、前記第1の基準器と前記第2の基準器に前記レーザートラッカーからレーザー光を照射して、前記第1の基準器及び前記第2の基準器の座標データを取得する第1取得ステップと、
前記レーザートラッカーを前記測定位置に配置して、前記第2の基準器に前記レーザートラッカーからレーザー光を照射して、前記第2の基準器の座標データを取得する第2取得ステップと、を有し
前記処理装置は、前記第1取得ステップで取得した前記第2の基準器の座標データと、前記第2取得ステップで取得した前記第2の基準器の座標データと、に基づいて前記レーザートラッカーの移動量を算出し、
前記処理装置は、前記第1取得ステップで取得した前記第1の基準器の座標データに、前記移動量を加算して、前記測定位置に配置された前記レーザートラッカーを基準とした前記第1の基準器の座標データを算出することを特徴とする三次元形状測定システムの設定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、三次元形状測定システム及び三次元形状測定システムの設定方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1の三次元形状測定システムは、対象物の形状を測定する三次元形状測定器と、当該三次元形状測定器の位置を特定する際のターゲットとなる基準器と、を有する。
【先行技術文献】
【特許文献】
【0003】
特開2022-180779号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の三次元形状測定器と基準器は、車両のルーフ部に配置されている。
特許文献1では、三次元形状測定器から基準器にレーザー光を照射して、三次元形状測定器から見た基準器の座標データを取得する。また、車両から離間した位置に配置された基準点計測器から基準器にレーザー光を照射して、基準点計測器から見た基準器の座標データを取得する。そして、三次元形状測定器を基準とした基準器の座標データと、基準点計測器を基準とした基準器の座標データと、に基づいて、基準点計測器を基準とした三次元形状測定器の座標データが特定される。
【0005】
ここで、特許文献1では、重量物である三次元形状測定器を車両のルーフ部に持ち上げる必要があるため作業負担が大きい。
この場合において、作業負担を軽減するために三次元形状測定器をルーフ部よりも下側の荷室部に配置することが考えられる。しかしながら、三次元形状測定器を荷室部に配置すると、三次元形状測定器から照射されるレーザー光がルーフ部で遮られて基準器に届かないことがある。そうすると、三次元形状測定器を基準とした基準器の座標データを取得できず、基準点計測器を基準とした三次元形状測定器の座標データを取得できなくなることがある。
【0006】
そこで、三次元形状測定器を車両の荷室部に設けた状態で、基準点計測器を基準とした三次元形状測定器の座標データを取得できるようにすることが求められている。
【課題を解決するための手段】
【0007】
本発明の一態様に係る三次元形状測定システムは、
対象物に対する測定光の照射により、前記対象物の三次元形状を測定する三次元形状測定器と、
車両において、基準点計測器から視認可能な位置に配置された第1の基準器と、
前記三次元形状測定器を、前記車両の荷室内に収容した収容位置と、前記対象物に対する測定光の照射が可能で、前記第1の基準器の座標データを取得不能な測定位置で位置決め可能とする位置決め機構と、
前記三次元形状測定器の測定データと、前記基準点計測器が取得した座標データであって、前記基準点計測器を基準とした前記第1の基準器の座標データが入力される処理装置と、を有し、
前記処理装置は、前記三次元形状測定器を基準とした前記第1の基準器の座標データであって予め取得した座標データと、前記基準点計測器で測定した前記第1の基準器の座標データであって、前記基準点計測器を基準とした前記第1の基準器の座標データと、に基づいて、前記三次元形状測定器の測定データを、前記基準点計測器を基準とした測定データに変換する。
【発明の効果】
【0008】
本発明によれば、三次元形状測定器を車両の荷室部に設けた状態で、基準点計測器を基準とした三次元形状測定器の座標データを取得できる。
【図面の簡単な説明】
【0009】
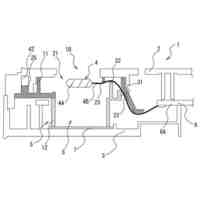
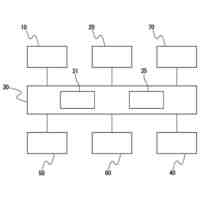
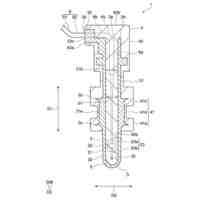
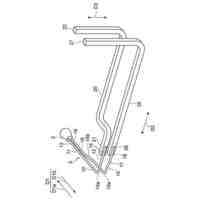
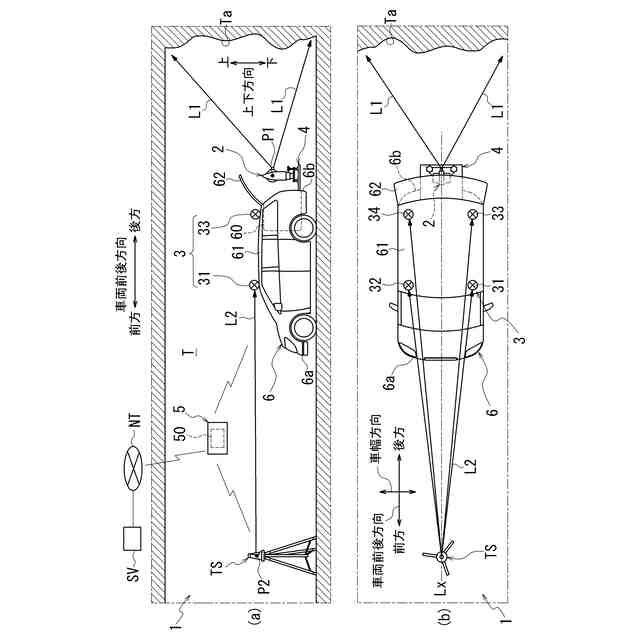
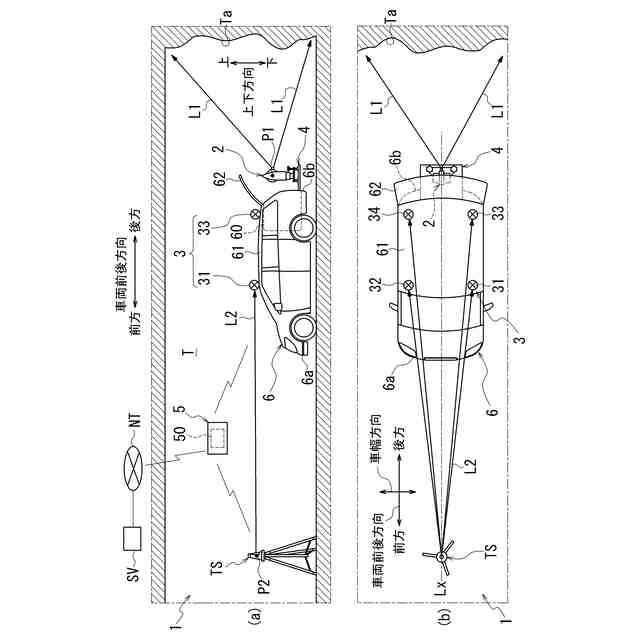
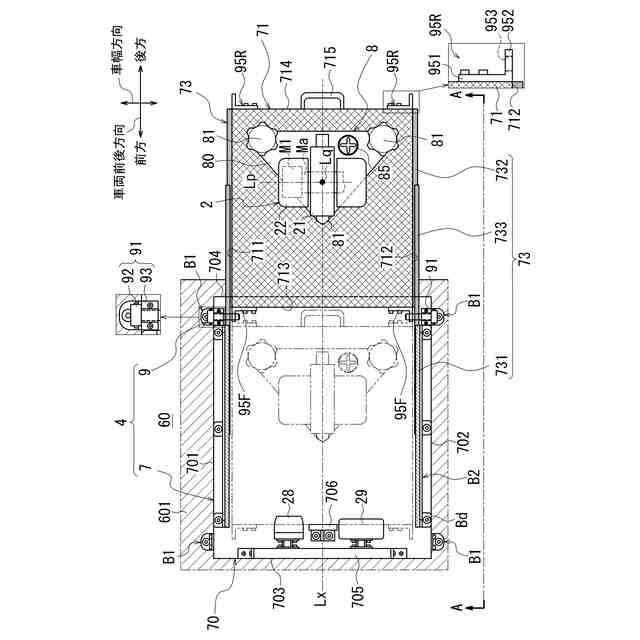
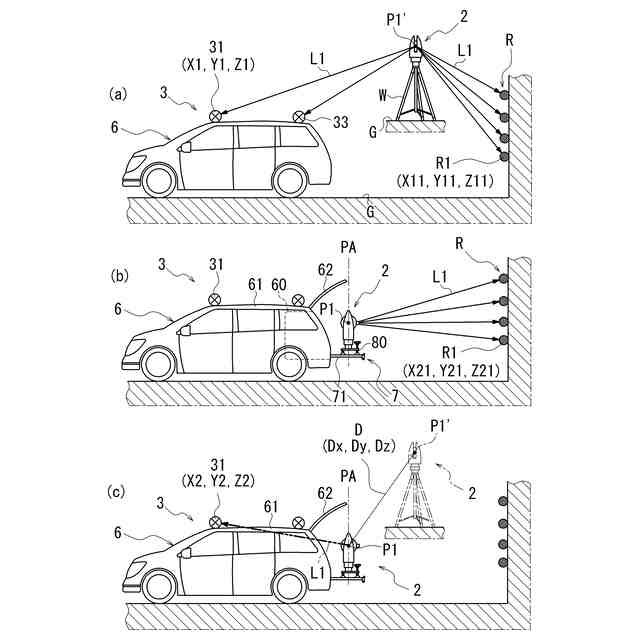
三次元形状測定システムの概略構成図である。
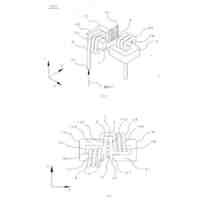
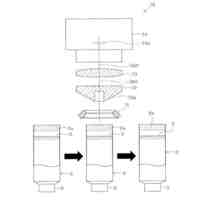
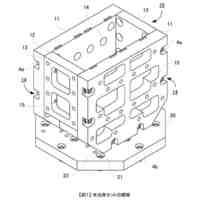
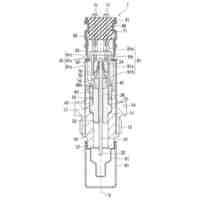
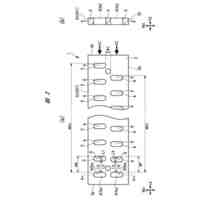
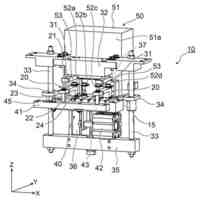
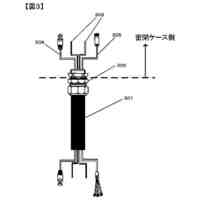
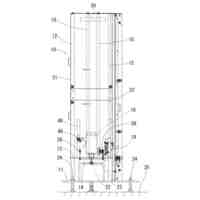
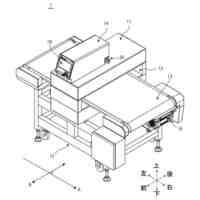
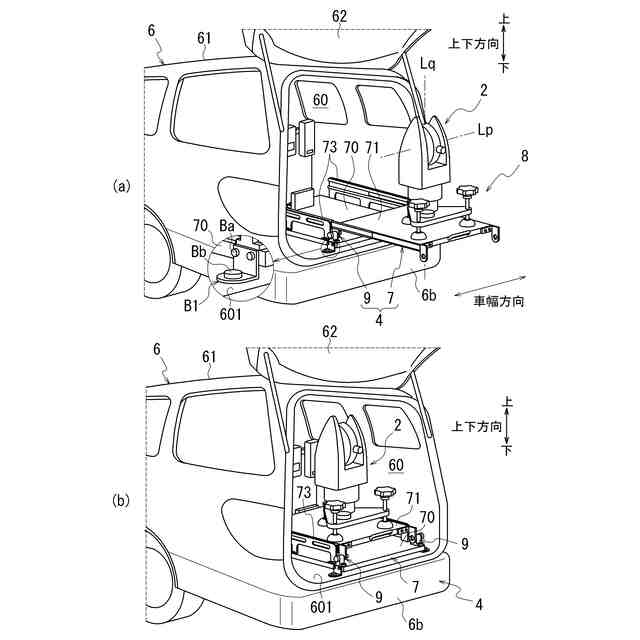
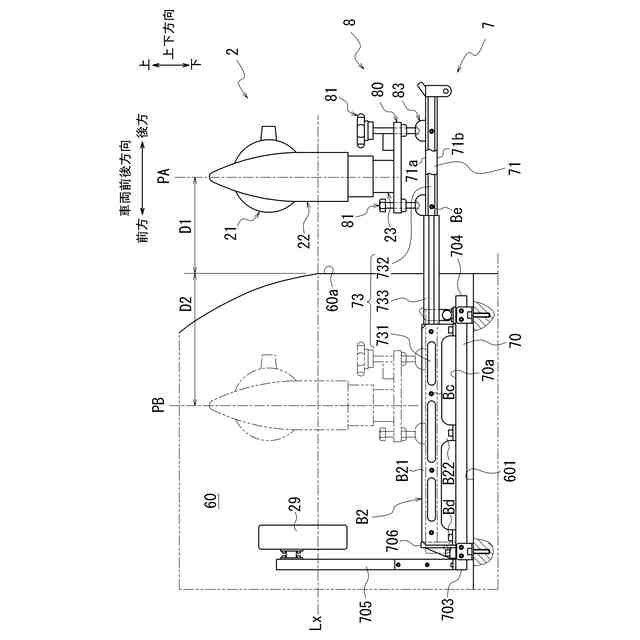
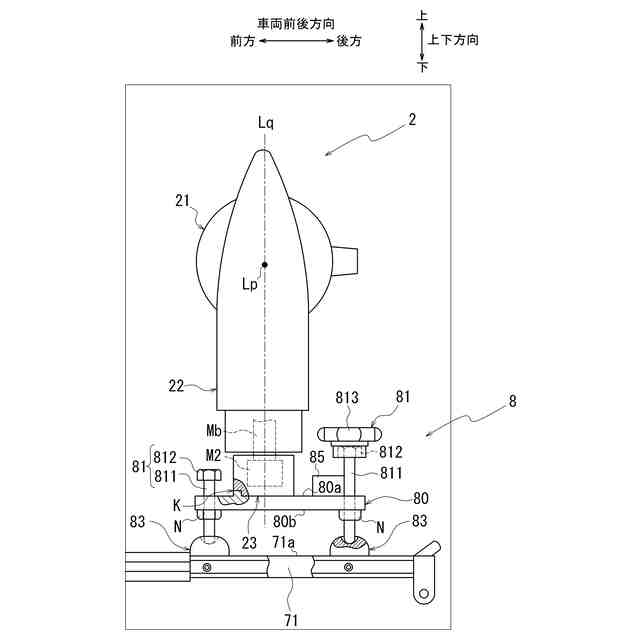
位置決め機構を説明する図ある。
位置決め機構を説明する図である。
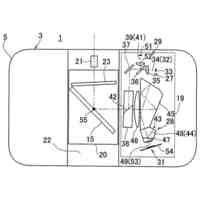
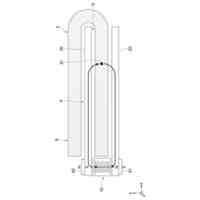
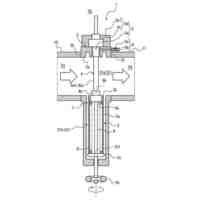
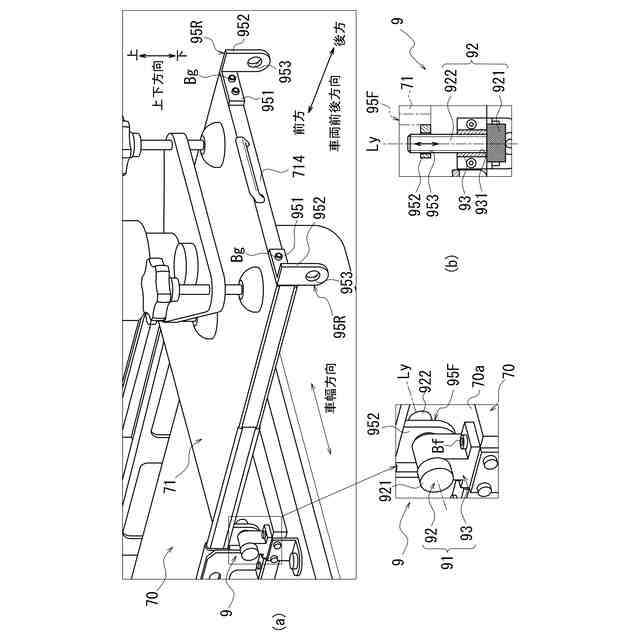
スライド機構を説明する図である。
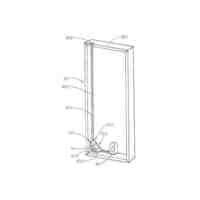
レベル調整機構を説明する図である。
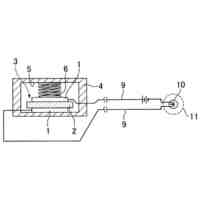
ロック機構を説明する図である。
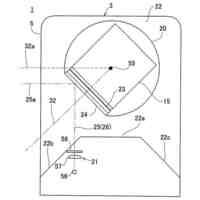
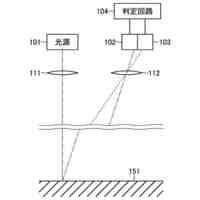
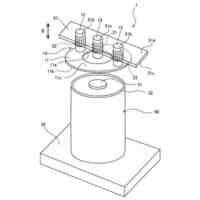
レーザートラッカーを基準とした測量プリズムの座標データの取得方法を説明する図である。
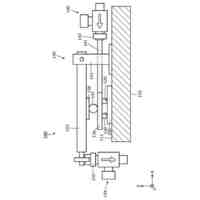
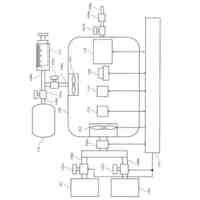
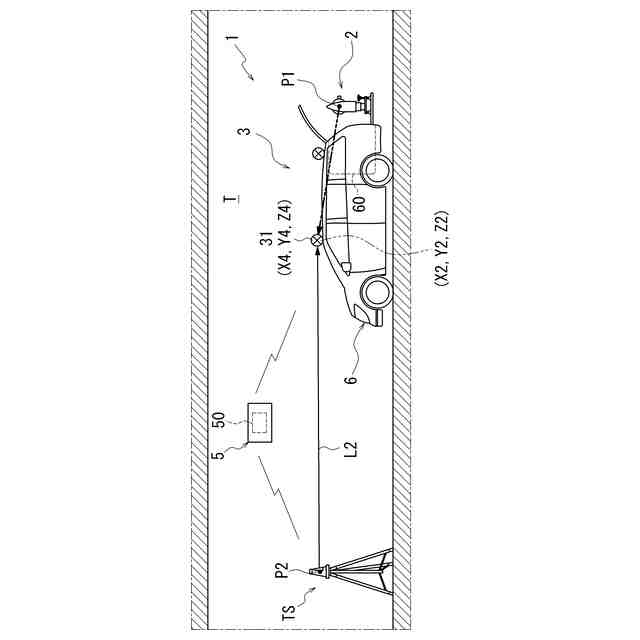
トータルステーションを基準としたレーザートラッカーの座標データの取得方法を説明する図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態をトンネル掘削時の切羽面の形状測定に用いる三次元形状測定システム1に適用した場合を例に挙げて説明する。
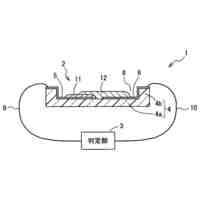
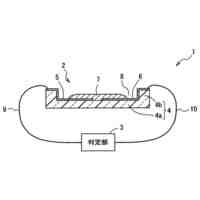
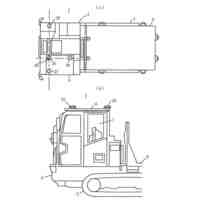
図1は、三次元形状測定システム1を説明する図である。図1の(a)は、車両6の側方から見た三次元形状測定システム1を説明する図である。図1の(b)は、車両6の上方から見た三次元形状測定システム1を説明する図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
車両用計器
5日前
株式会社大真空
センサ
2日前
株式会社大真空
センサ
7日前
甲神電機株式会社
電流センサ
13日前
株式会社大真空
センサ
27日前
日本精機株式会社
コントローラ
15日前
CKD株式会社
検査装置
5日前
株式会社トプコン
測量装置
5日前
株式会社トプコン
測量装置
5日前
日本電波工業株式会社
風速測定装置
27日前
株式会社諸岡
自動運転作業機
2日前
株式会社国際電気
治具セット
5日前
アズビル株式会社
漏液センサ
2日前
三菱重工冷熱株式会社
降雨装置
15日前
トヨタ自動車株式会社
解析装置
27日前
シャープ株式会社
測定装置
5日前
ローム株式会社
半導体装置
14日前
日本特殊陶業株式会社
ガスセンサ
13日前
株式会社デンソー
検出装置
15日前
株式会社ジークエスト
感温センサー
13日前
アズビル株式会社
真空計測システム
2日前
株式会社ジェイテクト
荷重付与装置
5日前
株式会社ピーエムティー
検査ゲージ
27日前
理研計器株式会社
ガス検知器
2日前
個人
コンベックスルール用の計測補助用具
27日前
個人
電気計器用結線器
2日前
株式会社チノー
耐熱配管および測定システム
6日前
株式会社ミツトヨ
目盛板姿勢検査方法
5日前
有限会社巧機工
冷凍物打撃装置
5日前
横河電機株式会社
流路装置
13日前
TDK株式会社
温度センサ
13日前
株式会社エー・アンド・デイ
金属検出機
2日前
エスペック株式会社
二次電池用プローブ
5日前
株式会社クオルテック
試験装置および試験方法
13日前
TDK株式会社
温度センサ
7日前
大同特殊鋼株式会社
超音波欠陥検出方法
13日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ