TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024175151
公報種別
公開特許公報(A)
公開日
2024-12-18
出願番号
2021178387
出願日
2021-10-29
発明の名称
マスタ・スレーブシステム、制御装置、制御方法及びプログラム
出願人
個人
,
モーションリブ株式会社
,
テルモ株式会社
代理人
個人
,
個人
主分類
A61B
34/37 20160101AFI20241211BHJP(医学または獣医学;衛生学)
要約
【課題】マスタ・スレーブシステムにおいてスレーブの動作形態をより適切なものとする。
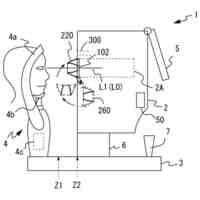
【解決手段】マスタ・スレーブシステム1は、マスタ装置10と、スレーブ装置20と、制御装置30と、を備える。また、制御装置30は、操作制御部353と、力触覚伝達部354と、を備える。力触覚伝達部354は、マスタ装置10に入力された操作と当該操作に応じて動作する操作対象となる機器(カテーテル)に入力された外力とに基づいて、マスタ装置10とスレーブ装置20との間で力触覚の伝達制御を実行する。操作制御部353は、マスタ装置10に入力された操作に応じて、操作対象となる機器の設定された動作をスレーブ装置20に実行させる。
【選択図】図1
特許請求の範囲
【請求項1】
操作者の操作が入力されるマスタ装置と、前記マスタ装置に入力された操作に応じて操作対象となる機器を遠隔的に動作させるスレーブ装置と、を含むマスタ・スレーブシステムであって、
前記マスタ装置に入力された操作と当該操作に応じて動作する前記操作対象となる機器に入力された外力とに基づいて、前記マスタ装置と前記スレーブ装置との間で力触覚の伝達制御を実行する力触覚制御手段と、
前記マスタ装置に入力された操作に応じて、前記操作対象となる機器の設定された動作を前記スレーブ装置に実行させる操作制御手段と、
を備えることを特徴とするマスタ・スレーブシステム。
続きを表示(約 1,700 文字)
【請求項2】
前記マスタ装置に入力された操作に対して前記力触覚の伝達制御を実行する第1のモードと、前記マスタ装置に入力された操作に対して前記力触覚の伝達制御を実行することなく、前記設定された動作を実行する第2のモードと、を切り替える切り替え手段を備えることを特徴とする請求項1に記載のマスタ・スレーブシステム。
【請求項3】
前記操作対象となる機器は、線状に構成された部分を有し、
前記力触覚制御手段は、前記第1のモードにおいて、前記操作対象となる機器の軸方向への進退動作及び軸周りの回転動作それぞれについて、前記力触覚の伝達制御を実行することを特徴とする請求項1または2に記載のマスタ・スレーブシステム。
【請求項4】
前記操作対象となる機器は、被検体に挿入されるカテーテルまたはガイドワイヤを備え、前記マスタ装置におけるカテーテルまたはガイドワイヤの操作に応じて、前記スレーブ装置が当該カテーテルまたはガイドワイヤを軸方向に進退または軸周りに回転させることを特徴とする請求項1から3のいずれか1項に記載のマスタ・スレーブシステム。
【請求項5】
前記第1のモードにおいて、前記力触覚の伝達制御を実行しながら前記操作対象となる機器を軸周りに回転させる回転用アクチュエータと、
前記第2のモードにおいて、前記力触覚の伝達制御を実行することなく、前記設定された動作として前記操作対象となる機器を軸周りに回転させる回転機構と、
を備えることを特徴とする請求項3または4に記載のマスタ・スレーブシステム。
【請求項6】
前記回転機構は、前記操作対象となる機器を第1の把持部材及び第2の把持部材で挟み、前記第1の把持部材と前記第2の把持部材とを擦り合わせる動作を行うことにより、把持された前記操作対象となる機器を軸周りに回転させることを特徴とする請求項5に記載のマスタ・スレーブシステム。
【請求項7】
操作者の操作が入力されるマスタ装置と、前記マスタ装置に入力された操作に応じて操作対象となる機器を遠隔的に動作させるスレーブ装置と、を含むマスタ・スレーブシステムにおける前記マスタ装置及びスレーブ装置を制御する制御装置であって、
前記スレーブ装置が前記操作対象となる機器を把持した状態で、前記マスタ装置と前記スレーブ装置との間で力触覚の伝達制御を実行する力触覚制御手段と、
前記マスタ装置における操作に応じて、前記スレーブ装置が前記操作対象となる機器の設定された動作を実行する操作制御手段と、
を備えることを特徴とする制御装置。
【請求項8】
操作者の操作が入力されるマスタ装置と、前記マスタ装置に入力された操作に応じて操作対象となる機器を遠隔的に動作させるスレーブ装置と、を含むマスタ・スレーブシステムが実行する制御方法であって、
前記マスタ装置に入力された操作と当該操作に応じて動作する前記操作対象となる機器に入力された外力とに基づいて、前記マスタ装置と前記スレーブ装置との間で力触覚の伝達制御を実行する力触覚制御ステップと、
前記マスタ装置に入力された操作に応じて、前記操作対象となる機器の設定された動作を前記スレーブ装置に実行させる操作制御ステップと、
を含むことを特徴とする制御方法。
【請求項9】
操作者の操作が入力されるマスタ装置と、前記マスタ装置に入力された操作に応じて操作対象となる機器を遠隔的に動作させるスレーブ装置と、を含むマスタ・スレーブシステムにおける前記マスタ装置及びスレーブ装置を制御するコンピュータに、
前記マスタ装置に入力された操作と当該操作に応じて動作する前記操作対象となる機器に入力された外力とに基づいて、前記マスタ装置と前記スレーブ装置との間で力触覚の伝達制御を実行する力触覚制御機能と、
前記マスタ装置に入力された操作に応じて、前記操作対象となる機器の設定された動作を前記スレーブ装置に実行させる操作制御機能と、
を実現させることを特徴とするプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、マスタ・スレーブシステム、制御装置、制御方法及びプログラムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、マスタスレーブマニピュレータにおいて、スレーブ装置側の動作負荷に応じた操作反力をマスタ装置側の操作具に付与する力帰還制御等のバイラテラル制御を実行する構成が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開昭64-34686号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、マスタ・スレーブシステムをカテーテル等として実現した場合、スレーブを動作させる上で種々の動作形態が求められる場合がある。例えば、スレーブがカテーテルを移動させる構成とし、病変付近に到達するまで高速に長い距離を移動させたり、病変付近において正確に短い距離を移動させたりする等のケースである。
しかしながら、バイラテラル制御を実行する従来のマスタ・スレーブシステムは、マスタとスレーブとの間で正確に位置あるいは力の伝達を行うことに主眼が置かれており、スレーブを動作させる上で種々の動作形態が求められるという要求に適切に応えるものとはなっていなかった。
即ち、従来のマスタ・スレーブシステムは、スレーブの動作形態において改善の余地があった。
本発明の課題は、マスタ・スレーブシステムにおいてスレーブの動作形態をより適切なものとすることである。
【課題を解決するための手段】
【0005】
上記課題を解決するため、本発明の一態様に係るマスタ・スレーブシステムは、
操作者の操作が入力されるマスタ装置と、前記マスタ装置に入力された操作に応じて操作対象となる機器を遠隔的に動作させるスレーブ装置と、を含むマスタ・スレーブシステムであって、
前記マスタ装置に入力された操作と当該操作に応じて動作する前記操作対象となる機器に入力された外力とに基づいて、前記マスタ装置と前記スレーブ装置との間で力触覚の伝達制御を実行する力触覚制御手段と、
前記マスタ装置に入力された操作に応じて、前記操作対象となる機器の設定された動作を前記スレーブ装置に実行させる操作制御手段と、
を備えることを特徴とする。
【発明の効果】
【0006】
本発明によれば、マスタ・スレーブシステムにおいてスレーブの動作形態をより適切なものとすることが可能となる。
【図面の簡単な説明】
【0007】
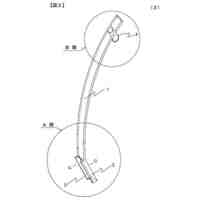
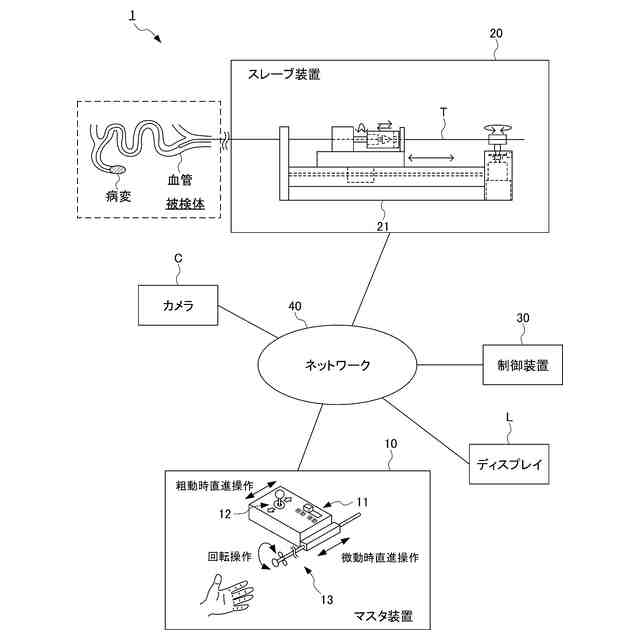
本発明の一実施形態に係るマスタ・スレーブシステム1の全体構成を示す模式図である。
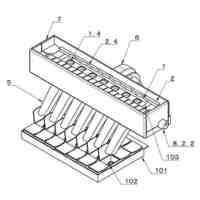
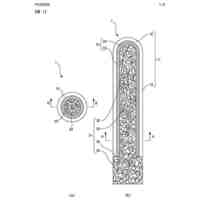
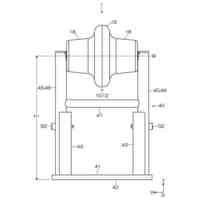
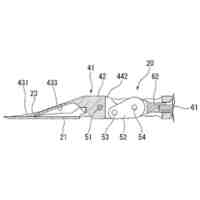
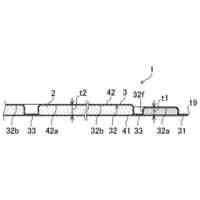
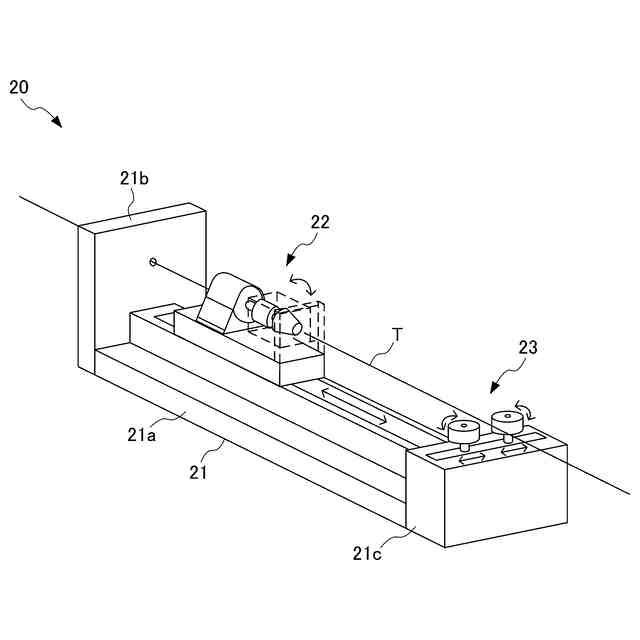
スレーブ装置20の構成を示す模式図(斜視図)である。
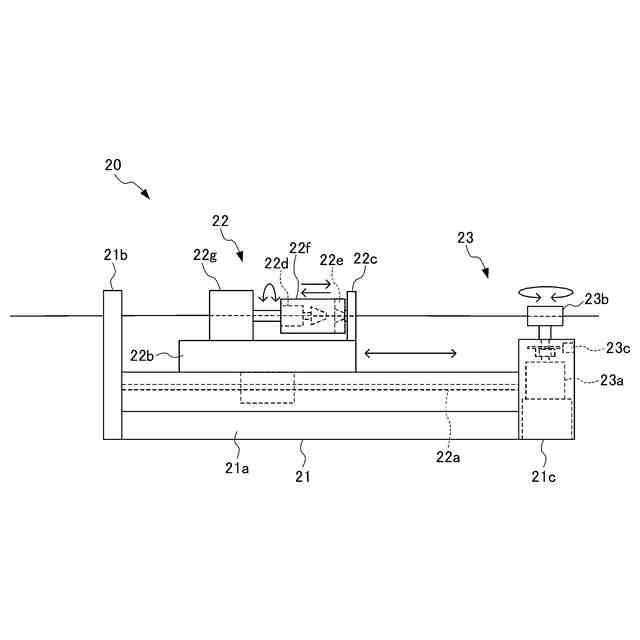
スレーブ装置20の構成を示す模式図(側面図)である。
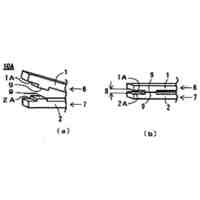
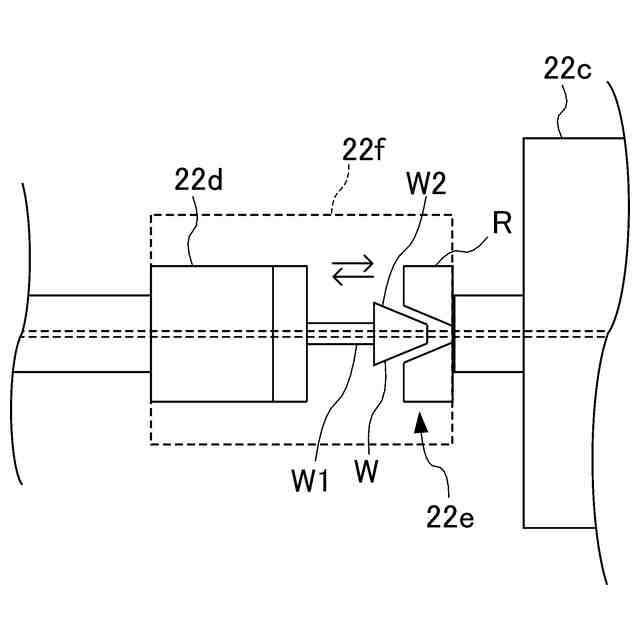
ロック機構22eの構成例を示す模式図である。
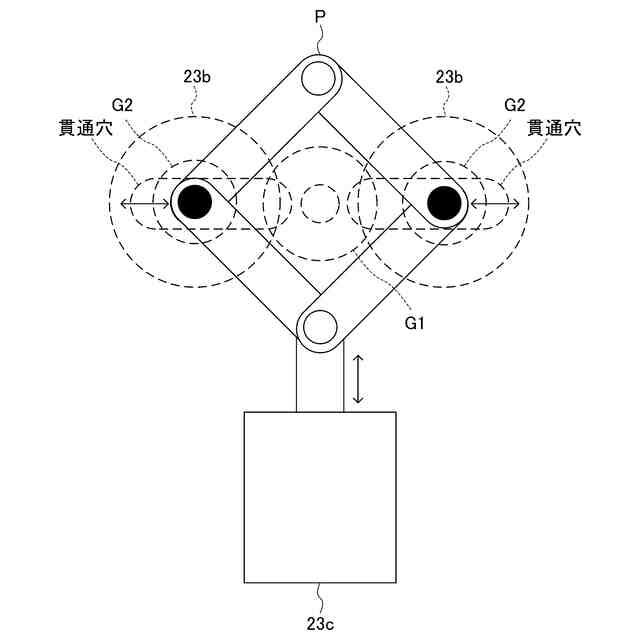
ローラ間隔切替機構の構成例を示す模式図である。
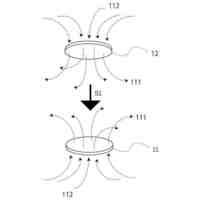
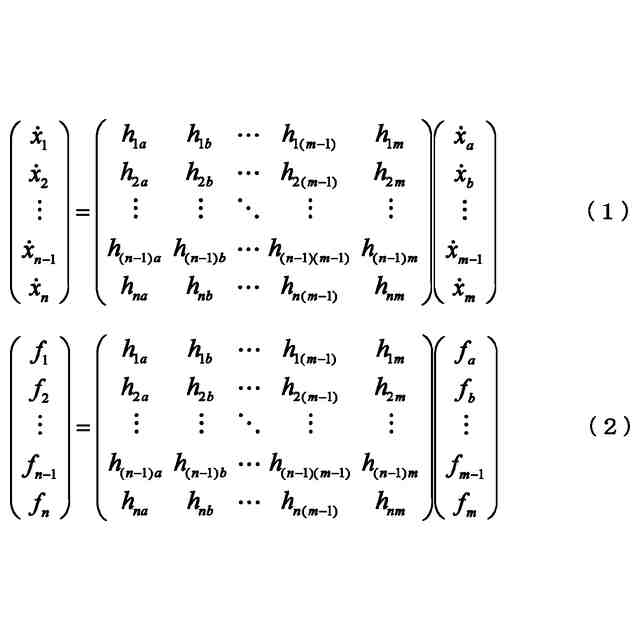
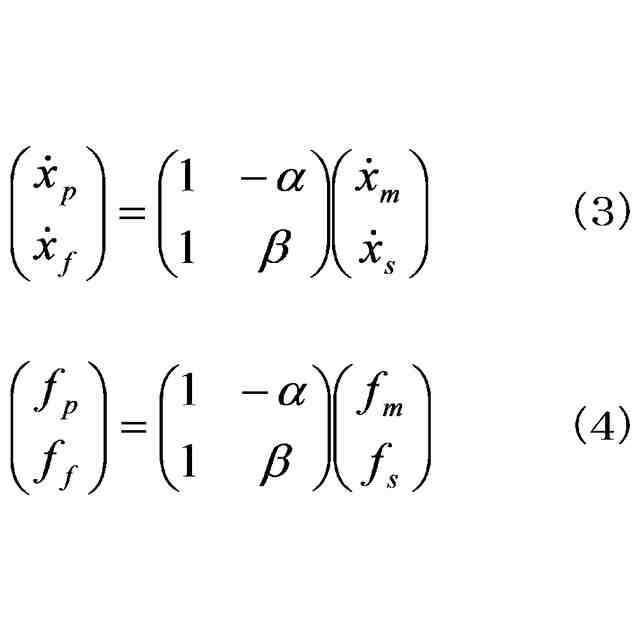
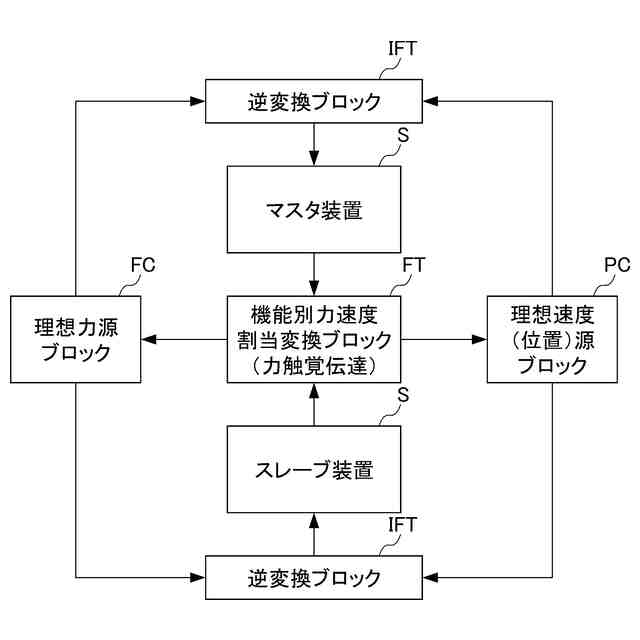
微動モードにおいて制御装置30で実行される力触覚伝達制御の基本的原理を示す模式図である。
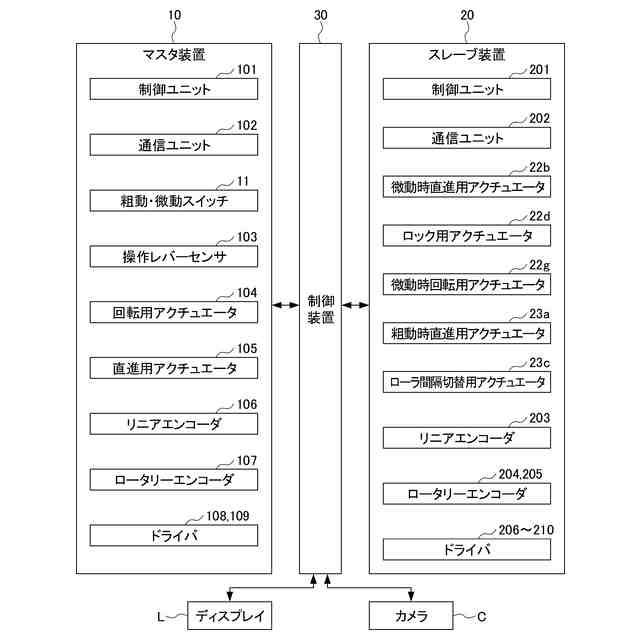
マスタ・スレーブシステム1における制御系統のハードウェア構成を示すブロック図である。
制御装置30を構成する情報処理装置のハードウェア構成を示す模式図である。
マスタ・スレーブシステム1の機能的構成を示すブロック図である。
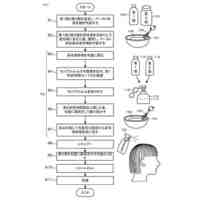
制御装置30が実行する操作制御処理の流れを説明するフローチャートである。
制御装置30が実行する力触覚伝達処理の流れを説明するフローチャートである。
第2実施形態に係るマスタ・スレーブシステム1の全体構成を示す模式図である。
スレーブ装置20の構成を示す模式図(斜視図)である。
スレーブ装置20の構成を示す模式図(側面図)である。
把持・擦り合わせ部23dの構成例を示す模式図である。
第2実施形態のマスタ・スレーブシステム1における制御系統のハードウェア構成を示すブロック図である。
制御装置30が実行する操作制御処理の流れを説明するフローチャートである。
制御装置30が実行する力触覚伝達処理の流れを説明するフローチャートである。
微動実行部22の他の構成例を示す模式図である。
【発明を実施するための形態】
【0008】
以下、本発明の実施形態について、図面を参照して説明する。
【0009】
[第1実施形態]
[構成]
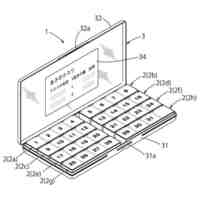
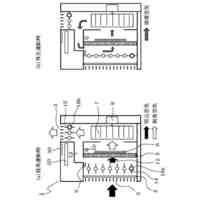
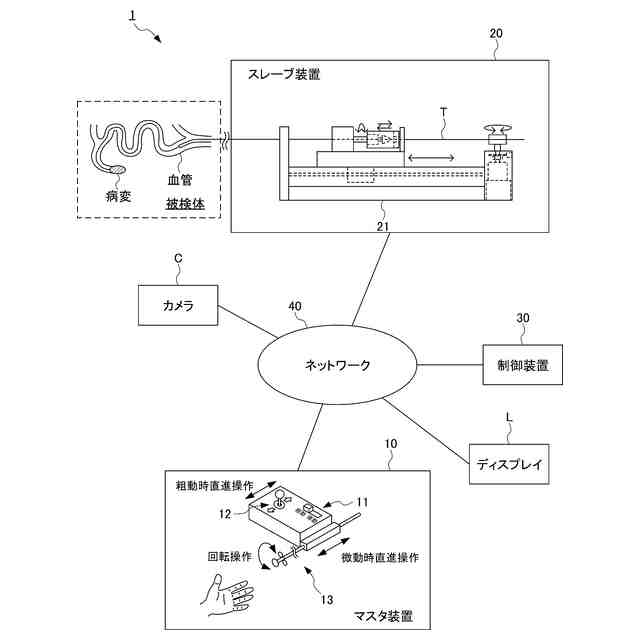
図1は、本発明の一実施形態に係るマスタ・スレーブシステム1の全体構成を示す模式図である。
図1に示すように、本実施形態に係るマスタ・スレーブシステム1は、機械的に分離したマスタ装置10とスレーブ装置20とを含んで構成される。一例として、本実施形態におけるマスタ・スレーブシステム1は、マスタ装置10がユーザにより操作されるマニピュレータ(操作部)の機能を備え、スレーブ装置20が被検体に挿入されるエンドエフェクタを備えたカテーテルシステムを構成するものとする。
【0010】
図1において、マスタ・スレーブシステム1は、マスタ装置10と、スレーブ装置20と、制御装置30と、を含んで構成され、マスタ装置10及びスレーブ装置20と、制御装置30とは、ネットワーク40を介して有線または無線通信可能に構成されている。なお、マスタ・スレーブシステム1は、ディスプレイLと、複数のカメラCとを適宜備えることが可能である。カメラCとして、スレーブ装置20が挿入される被検体の外観を撮影するビデオカメラ、あるいは、X線により被検体の内部を撮影するX線カメラ等の種々の撮影装置を用いることができる。また、複数のカメラCによって各種画像を撮影し、これらの画像を表示する複数のディスプレイLを備えることもできる。
また、マスタ・スレーブシステム1は、エンドエフェクタ及びカテーテルシースを備えるカテーテルTを高速に長い距離移動させるための粗動モードと、エンドエフェクタ及びカテーテルシース(カテーテルT)を正確に短い距離移動させるための微動モードとを実行可能であり、微動モードにおいて、マスタ・スレーブ間で力触覚の伝達を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
歯の掃除具
1か月前
個人
錠剤撒き器
3か月前
個人
乗馬テラピー
1か月前
個人
塗り薬塗り具
12日前
個人
身体牽引装置
1か月前
個人
染毛方法
1か月前
個人
発熱器具
1か月前
個人
収納容器
5日前
個人
健康器具
11日前
個人
挟圧手工爪矯正具
3か月前
個人
磁器治療器
1か月前
個人
動体視力強化装置
2か月前
個人
鼻腔拡張具
4か月前
株式会社コロナ
脱臭機
3か月前
個人
血管硬化度算出方法
2か月前
株式会社ナカニシ
生検針
1か月前
個人
口腔ケア用歯ブラシ
4か月前
東レ株式会社
下肢着用具
1か月前
東レ株式会社
吸収制御剤
1か月前
株式会社ニデック
眼科装置
2か月前
株式会社ファンケル
化粧料
2か月前
大正製薬株式会社
内服液剤
1か月前
株式会社ニデック
眼科装置
3か月前
株式会社ニデック
眼科装置
3か月前
株式会社ファンケル
化粧料
18日前
株式会社MIC
陰茎補助具
10日前
個人
Dr.なかまつよい耳
17日前
個人
唾液分泌促進具
2か月前
株式会社ニデック
眼科装置
2か月前
株式会社ニデック
眼科装置
2か月前
株式会社ファンケル
化粧料
1か月前
株式会社ダリヤ
皮膚洗浄剤
3か月前
個人
立位姿勢支持具
23日前
株式会社ダリヤ
染毛料組成物
17日前
株式会社TAT
冷却具
10日前
株式会社東洋新薬
皮膚外用剤
23日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ