TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024172957
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023091041
出願日
2023-06-01
発明の名称
電動車
出願人
トヨタ自動車株式会社
代理人
弁理士法人アイテック国際特許事務所
主分類
B60L
3/00 20190101AFI20241205BHJP(車両一般)
要約
【課題】少なくとも1つの第1モータや第2モータに不要な制限をかけるのをより適切に抑制する。
【解決手段】蓄電装置の電流または電力が第1上側閾値を超過したときには、超過する前に比して第1出力制限を厳しい側に補正し、蓄電装置の電流または電力が第1下側閾値を超過したときには、超過する前に比して第1入力制限を厳しい側に補正し、リアクトルの電流または電力が第2上側閾値を超過したときには、超過する前に比して第2出力制限を厳しい側に補正し、リアクトルの電流または電力が第2下側閾値を超過したときには、超過する前に比して第2入力制限を厳しい側に補正する。
【選択図】図2
特許請求の範囲
【請求項1】
少なくとも1つの第1モータと、第2モータと、蓄電装置と、前記少なくとも1つの第1モータと電力のやりとりが可能な高電圧側電力ラインと前記第2モータおよび前記蓄電装置と電力のやりとりが可能な低電圧側電力ラインとに接続された昇圧コンバータと、前記蓄電装置の第1入力制限および第1出力制限と前記昇圧コンバータの第2入力制限および第2出力制限との範囲内で前記少なくとも1つの第1モータと前記第2モータと前記昇圧コンバータとを制御する制御装置と、を備える電動車であって、
前記制御装置は、前記蓄電装置の電流または電力が第1下側閾値を超過したときには、超過前に比して前記第1入力制限を厳しい側に補正し、前記蓄電装置の電流または電力が第1上側閾値を超過したときには、超過前に比して前記第1出力制限を厳しい側に補正し、前記昇圧コンバータの電流または電力が第2下側閾値を超過したときには、超過前に比して前記第2入力制限を厳しい側に補正し、前記昇圧コンバータの電流または電力が第2上側閾値を超過したときには、超過前に比して前記第2出力制限を厳しい側に補正する、
電動車。
発明の詳細な説明
【技術分野】
【0001】
本開示は、電動車に関する。
続きを表示(約 3,900 文字)
【背景技術】
【0002】
従来、この種の電動車としては、モータと、蓄電装置と、モータにインバータを介して接続された高電圧側電力ラインと蓄電装置に接続された低電圧側電力ラインとに接続された昇圧コンバータとを備え、蓄電装置の出力電流の検出値が制御閾値を超えた場合に、検出値に基づいて蓄電装置の出力電流を制御する超過電流フィードバック制御を実行するものが提案されている(例えば、特許文献1参照)。この電動車では、蓄電装置を保護するために定められる第1電流閾値と、昇圧コンバータの電力用半導体素子を保護するために定められる第2電流閾値と、のうちの小さい方を制御閾値とする。
【先行技術文献】
【特許文献】
【0003】
特開2011-250511号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
昇圧コンバータに対して高電圧側電力ライン側に少なくとも1つの第1モータが接続されると共に低電圧側電力ライン側に蓄電装置および第2モータが接続された電動車において、上述のように、第1電流閾値と第2電流閾値とのうちの小さい方を制御閾値とすると、少なくとも1つの第1モータや第2モータに不要な制限をかけてしまう可能性がある。本開示の電動車は、少なくとも1つの第1モータや第2モータに不要な制限をかけるのをより適切に抑制することを主目的とする。
【課題を解決するための手段】
【0005】
本開示の電動車は、上述の主目的を達成するために以下の手段を採った。本開示の電動車は、少なくとも1つの第1モータと、第2モータと、蓄電装置と、前記少なくとも1つの第1モータと電力のやりとりが可能な高電圧側電力ラインと前記第2モータおよび前記蓄電装置と電力のやりとりが可能な低電圧側電力ラインとに接続された昇圧コンバータと、前記蓄電装置の第1入力制限および第1出力制限と前記昇圧コンバータの第2入力制限および第2出力制限との範囲内で前記少なくとも1つの第1モータと前記第2モータと前記昇圧コンバータとを制御する制御装置と、を備える電動車であって、前記制御装置は、前記蓄電装置の電流または電力が第1下側閾値を超過したときには、超過前に比して前記第1入力制限を厳しい側に補正し、前記蓄電装置の電流または電力が第1上側閾値を超過したときには、超過前に比して前記第1出力制限を厳しい側に補正し、前記昇圧コンバータの電流または電力が第2下側閾値を超過したときには、超過前に比して前記第2入力制限を厳しい側に補正し、前記昇圧コンバータの電流または電力が第2上側閾値を超過したときには、超過前に比して前記第2出力制限を厳しい側に補正することを要旨とする。
【図面の簡単な説明】
【0006】
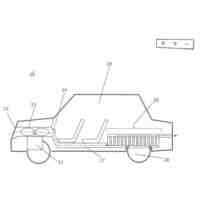
本開示のハイブリッド車20の概略構成図である。
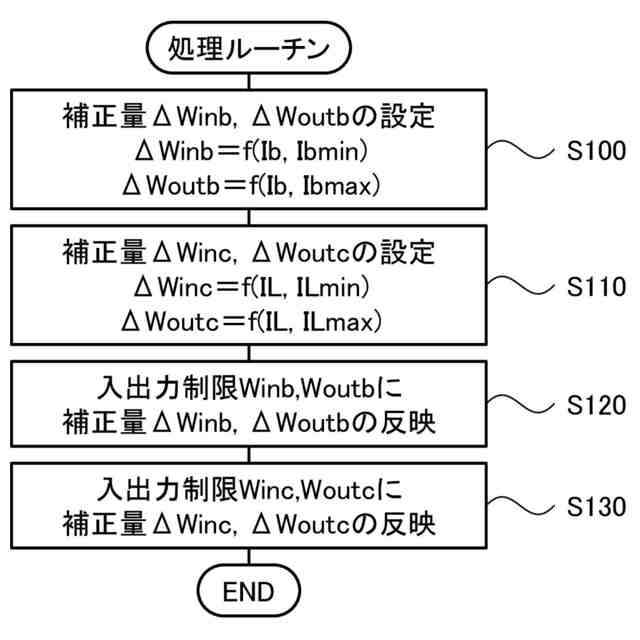
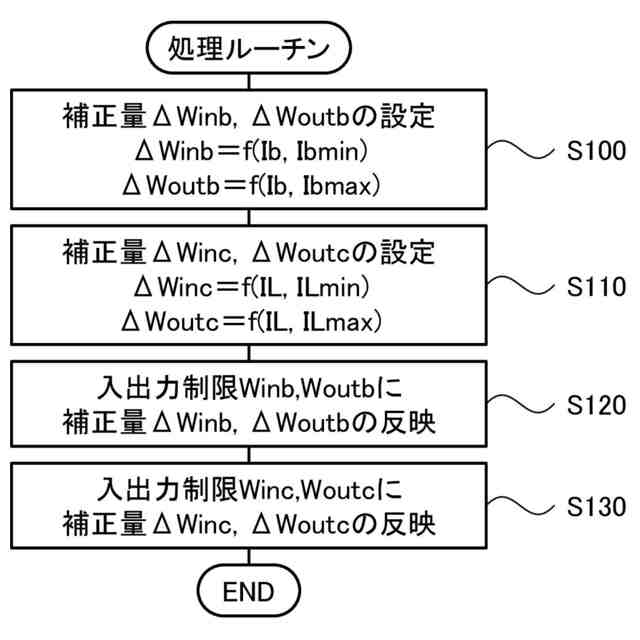
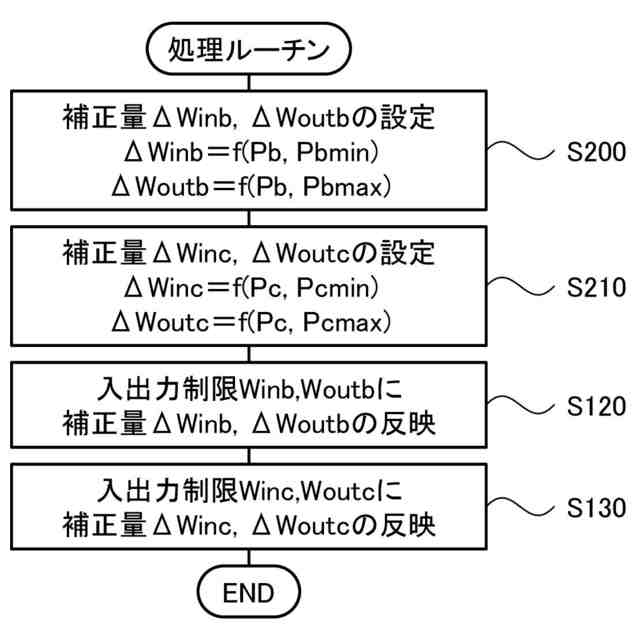
処理ルーチンの一例を示すフローチャートである。
処理ルーチンの一例を示すフローチャートである。
【発明を実施するための形態】
【0007】
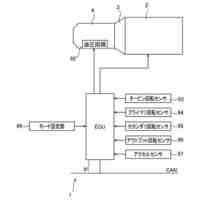
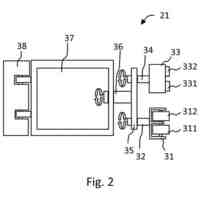
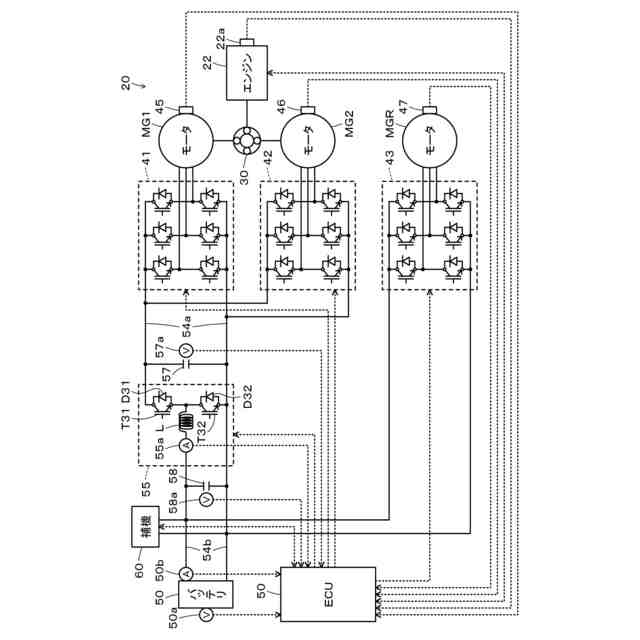
本開示の実施形態について図面を参照しながら説明する。図1は、本開示のハイブリッド車20の概略構成図である。図示するように、ハイブリッド車20は、エンジン22と、プラネタリギヤ30と、モータMG1,MG2(少なくとも1つの第1モータ)と、モータMGR(第2モータ)と、インバータ41,42,43と、バッテリ(蓄電装置)50と、昇圧コンバータ55と、補機60と、電子制御ユニット(以下、「ECU」という)70とを備える。
【0008】
プラネタリギヤ30のサンギヤは、モータMG1の回転子に接続されており、リングギヤは、前輪に連結された前輪用駆動軸に接続されており、キャリヤは、エンジン22のクランクシャフトに接続されている。モータMG1,MG2,MGRは、何れも同期発電電動機として構成されている。モータMG2の回転子は、前輪用駆動軸に接続されており、モータMGRの回転子は、後輪に連結された後輪用駆動軸に接続されている。インバータ41,42,43は、それぞれ、複数のスイッチング素子のスイッチングにより、モータMG1,MG2,MGRを回転駆動する。インバータ41,42は、高電圧側電力ライン54aに接続されており、インバータ43およびバッテリ50は、低電圧側電力ライン54bに接続されている。高電圧側電力ライン54aと低電圧側電力ライン54bとには、それぞれ、平滑用のコンデンサ57,58が取り付けられている。昇圧コンバータ55は、高電圧側電力ライン54aと低電圧側電力ライン54bとに接続されており、2つのスイッチング素子T31,T32と2つのダイオードD31,D32とリアクトルLとを有する。昇圧コンバータ55は、2つのスイッチング素子T31,T32のスイッチングにより、低電圧側電力ライン54bの電力を昇圧して高電圧側電力ライン54aに供給したり、高電圧側電力ライン54aの電力を降圧して高電圧側電力ライン54aに供給したりする。補機60は、例えば、車室内の空気調和を行なう空調装置を挙げることができる。
【0009】
ECU70は、マイクロコンピュータを備える。ECU70には、各種センサからの信号が入力されている。例えば、クランク角センサ22aからのエンジン22のクランクシャフトのクランク角θcrなどのエンジン22の状態に関する信号を挙げることができる。回転位置センサ45,46,47からのモータMG1,MG2,MGRの回転子の回転位置θm1,θm2,θm3も挙げることができる。電圧センサ50a、電流センサ50b、温度センサ50cからのバッテリ50の電圧Vb,電流Ib,温度Tbも挙げることができる。電流センサ55aからのリアクトルLの電流ILや、電圧センサ57a,58aからのコンデンサ57,58の電圧VH,VLも挙げることができる。イグニッションスイッチからのイグニッション信号や、シフトポジションセンサからのシフトレバーの操作位置(シフトポジションSP)、アクセルセンサからのアクセルペダルの踏込量(アクセル開度Acc)、ブレーキセンサからのブレーキペダルの踏込量(ブレーキペダルポジションBP)、車速センサからの車速Vも挙げることができる。ECU70からは、各種制御信号が出力されている。例えば、エンジン22やインバータ41,42,43、昇圧コンバータ55、補機60への制御信号を挙げることができる。ECU70は、エンジン22のクランク角θcrに基づいてエンジン22の回転数Neを演算したり、モータMG1,MG2,MGRの回転子の回転位置θm1,θm2,θm3に基づいてモータMG1,MG2,MGRの回転数Nm1,Nm2,Nm3を演算したり、バッテリ50の電流Ibの積算値に基づいてバッテリ50の蓄電割合SOCを演算したりしている。
【0010】
こうして構成された本実施形態のハイブリッド車20は、エンジン22の運転を伴って走行するハイブリッド走行(HV走行)モードや、エンジン22の運転を伴わずに走行する電動走行(EV走行)モード、を含む複数の走行モードを切り替えて走行する。HV走行モードでは、ECU70は、最初に、アクセル開度Accと車速Vとに基づいて走行用の要求トルクTd*を設定し、設定した要求トルクTd*と車速Vとに基づいて走行用の要求パワーPd*を設定する。続いて、バッテリ50の充放電要求パワーPb*と要求パワーPd*とに基づいてエンジン22の要求パワーPe*を計算する。そして、エンジン22から要求パワーPe*が出力されると共にバッテリ50の入出力制限Winb,Woutbおよび昇圧コンバータ55の入出力制限Winc,Woutcの範囲内で要求トルクTd*が配分比ktに基づいて配分されて前輪や後輪に出力されるように、エンジン22の目標回転数Ne*や目標トルクTe*、モータMG1,MG2,MGRのトルク指令Tm1*,Tm2*,Tmr*を設定する。配分比ktは、前輪に出力するトルクと後輪に出力するトルクとの和に対する前輪に出力するトルクの割合であり、車両の走行状態に基づいて設定される。さらに、エンジン22が目標回転数Ne*および目標トルクTe*に基づいて運転されるようにエンジン22の運転制御を行なうと共にモータMG1,MG2,MGRがトルク指令Tm1*、Tm2*,Tmr*で駆動されるようにインバータ41,42,43の制御を行なう。また、モータMG1,MG2を目標駆動点(トルク指令Tm1*,Tm2*および回転数Nm1,Nm2)で駆動できるようにコンデンサ57(高電圧側電力ライン54a)の目標電圧VH*を設定して昇圧コンバータ55の制御を行なう。EV走行モードでは、ECU70は、HV走行モードと同様に要求トルクTd*や要求パワーPd*を設定し、モータMG1のトルク指令Tm1*に値0を設定し、バッテリ50の入出力制限Winb,Woutbおよび昇圧コンバータ55の入出力制限Winc,Woutcの範囲内で要求トルクTd*が配分比ktに基づいて配分されて前輪や後輪に出力されるように、モータMG2,MGRのトルク指令Tm2*,Tmr*を設定する。トルク指令Tm1*,Tm2*,Tmr*に基づくインバータ41,42,43の制御や昇圧コンバータ55の制御はHV走行モードと同様である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両
2か月前
個人
授乳用車両
1日前
個人
眼科手術車
9日前
個人
自動車運転補助装置
1か月前
日本精機株式会社
表示装置
23日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1日前
個人
台車用車輪止め具
10日前
個人
キャンピングトレーラー
1か月前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
車載表示装置
25日前
日本精機株式会社
車外表示装置
3か月前
個人
謝意シグナル装着車
25日前
個人
自動車外部装着用しめ飾り
1か月前
エムケー精工株式会社
洗車装置
3か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
2か月前
株式会社青木製作所
タンクローリ
10日前
日本精機株式会社
車両用表示装置
2か月前
ダイハツ工業株式会社
車両
3か月前
日本精機株式会社
車両用表示装置
1か月前
株式会社SUBARU
車両
3か月前
トヨタ自動車株式会社
車両
1か月前
日本精機株式会社
車両用表示装置
1日前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用表示装置
24日前
トヨタ自動車株式会社
車両
10日前
東レ株式会社
車両用部材の補強方法
1か月前
日本化薬株式会社
ガス発生器
3か月前
株式会社コーワ
フィルター清掃装置
3か月前
ダイハツ工業株式会社
バッグ
2か月前
トヨタ自動車株式会社
搬送装置
1か月前
個人
タイヤ洗浄装置の軸受構造
23日前
ダイハツ工業株式会社
車両構造
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ