TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024171404
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023088381
出願日
2023-05-30
発明の名称
建設作業用ロボット
出願人
清水建設株式会社
代理人
個人
,
個人
,
個人
主分類
E04F
21/18 20060101AFI20241205BHJP(建築物)
要約
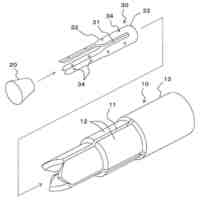
【課題】ボードを隙間なく位置決めすることが可能な建設作業用ロボットを提供する。
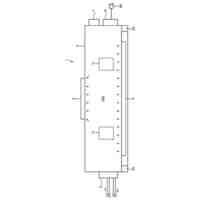
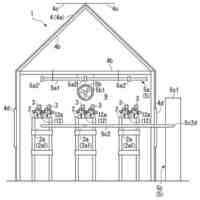
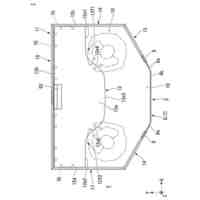
【解決手段】基台と、基台に設けられるとともに敷設ボードを着脱自在に把持するボード把持部を具備し、ボード把持部の移動が自在なボード吸着ユニットと、基台に設けられるとともに距離センサを具備し、距離センサの移動が自在な計測ユニットと、天井下地に既設された既設ボードの周囲に距離センサが配置されるように計測ユニットを制御し、距離センサの検出値に基づいてボード把持部が把持している敷設ボードを既設ボードに押し付けるようにボード吸着ユニットを制御する制御装置とを備える。
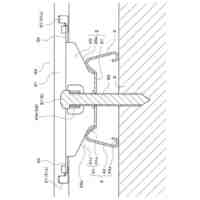
【選択図】図1
特許請求の範囲
【請求項1】
基台と、
前記基台に設けられるとともに敷設ボードを着脱自在に把持するボード把持部を具備し、前記ボード把持部の移動が自在なボード吸着ユニットと、
前記基台に設けられとともに距離センサを具備し、前記距離センサの移動が自在な計測ユニットと、
下地に既設された既設ボードの周囲に前記距離センサが配置されるように前記計測ユニットを制御し、前記距離センサの検出値に基づいて前記ボード把持部が把持している前記敷設ボードを前記既設ボードに押し付けるように前記ボード吸着ユニットを制御する制御装置と
を備えることを特徴とする建設作業用ロボット。
続きを表示(約 590 文字)
【請求項2】
前記制御装置は、
前記既設ボードから所定距離を空けた位置に前記敷設ボードを移動させるように前記ボード吸着ユニットを先行制御し、
前記敷設ボードを前記所定距離だけ追加移動させるように前記ボード吸着ユニットを追加制御する
ことを特徴とする請求項1に記載の建設作業用ロボット。
【請求項3】
前記既設ボード及び前記敷設ボードが矩形状であった場合、
前記制御装置は、前記敷設ボードにおいて直交する2辺について前記既設ボードに押し付けるように前記ボード吸着ユニットを制御する
ことを特徴とする請求項1又は2に記載の建設作業用ロボット。
【請求項4】
前記距離センサは、前記既設ボードの周囲における前記下地までの距離を検出する一次元センサであることを特徴とする請求項1又は2に記載の建設作業用ロボット。
【請求項5】
前記ボード把持部は、吸着パッドによって前記敷設ボードを把持するとともに前記吸着パッドの根元にゴムブッシュを備えることを特徴とする請求項1又は2に記載の建設作業用ロボット。
【請求項6】
前記制御装置は、前記ボード吸着ユニット及び前記計測ユニットとの信号の授受が自在な産業用コンピュータであることを特徴とする請求項1又は2に記載の建設作業用ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、建設作業用ロボットに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
下記特許文献1には、部材の取付け作業を代替又はアシストすることのできる建設作業用ロボットが開示されている。この建設作業用ロボットは、部材を母体に取付けるために用いられる建設作業用ロボットであって、基台と、基台に設けられたマニピュレータと、マニピュレータの先端に着脱自在に設けられたエンドエフェクタと、マニピュレータの先端に設けられ、部材及び母体の種別並びに位置を認識する認識手段と、エンドエフェクタと母体の位置関係を計測する計測手段とを備え、マニピュレータは、予め設定した母体の位置へマニピュレータの先端を接近移動させる移動制御手段を有し、エンドエフェクタは、部材保持手段と取付け操作手段と監視手段とを有する。
【0003】
このような建設作業用ロボットによれば、従来、作業員が手作業で行っていた部材の取付け作業を、この建設作業用ロボットで代替又はアシストすることができる。特に、取付け箇所が多数あり、取付け作業を多数回繰り返す必要がある場合には、作業員の負担を大幅に軽減することができるので、作業の省力化ないし省人化を図ることが可能である。
【先行技術文献】
【特許文献】
【0004】
特開2017-110466号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、内装工事の一つであるボード工事では、石膏ボードを下地にビスで固定する施工工事が行われている。このボード工事では、作業員が石膏ボードを決められた割付で隙間なく、決められたピッチで下地材にビスで固定していく。天井に石膏ボード等のボードを貼る際は上向けかつ高所での作業となるが、ボード間の隙間は施工不良に繋がる大きな問題となるため信頼度が求められる。
【0006】
しかしながら、このようなボード工事に上記建設作業用ロボットを適用しようとした場合、ボード間の隙間が施工要求を満足するようにボードを位置決めすることが困難である。ボード工事では、作業効率も要求されるので、できるだけ迅速にボードの位置決めを行って天井に貼り付けることが要求される。
【0007】
本発明は、上述した事情に鑑みてなされたものであり、ボードを隙間なく位置決めすることが可能な建設作業用ロボットの提供を目的とするものである。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明では、建設作業用ロボットに係る第1の解決手段として、基台と、前記基台に設けられるとともに敷設ボードを着脱自在に把持するボード把持部を具備し、前記ボード把持部の移動が自在なボード吸着ユニットと、前記基台に設けられとともに距離センサを具備し、前記距離センサの移動が自在な計測ユニットと、下地に既設された既設ボードの周囲に前記距離センサが配置されるように前記計測ユニットを制御し、前記距離センサの検出値に基づいて前記ボード把持部が把持している前記敷設ボードを前記既設ボードに押し付けるように前記ボード吸着ユニットを制御する制御装置とを備える、という手段を採用する。
【0009】
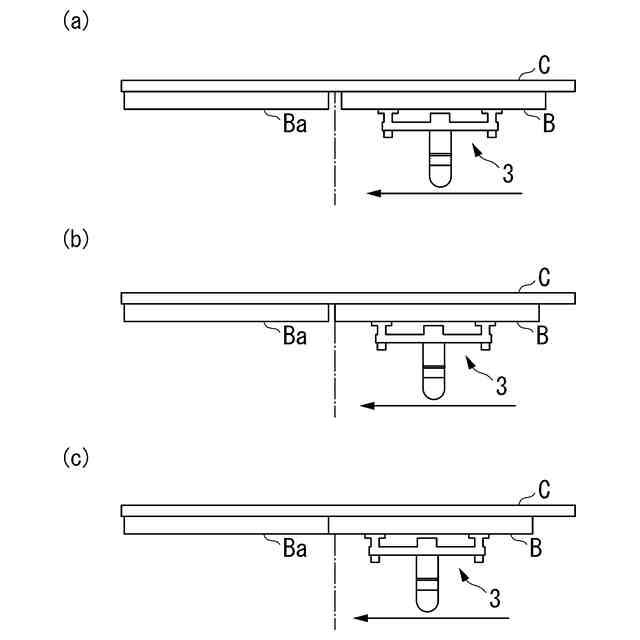
本発明では、建設作業用ロボットに係る第2の解決手段として、上記第1の解決手段において、前記制御装置は、前記既設ボードから所定隙間を空けた位置に前記敷設ボードを移動させるように前記ボード吸着ユニットを先行制御し、前記敷設ボードを前記所定距離だけ追加移動させるように前記ボード吸着ユニットを追加制御する、という手段を採用する。
【0010】
本発明では、建設作業用ロボットに係る第3の解決手段として、上記第1又は第2の解決手段において、前記既設ボード及び前記敷設ボードが矩形状であった場合、前記制御装置は、前記敷設ボードにおいて直交する2辺について前記既設ボードに押し付けるように前記ボード吸着ユニットを制御する、という手段を採用する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
清水建設株式会社
加熱井戸
11日前
清水建設株式会社
壁繋ぎ連結具
26日前
清水建設株式会社
放射線遮蔽構造
11日前
清水建設株式会社
水循環システム
19日前
清水建設株式会社
放射線遮蔽構造
19日前
清水建設株式会社
駐輪設備兼用ベンチ
19日前
清水建設株式会社
鉄骨プラズマ切断方法
8日前
清水建設株式会社
鉄骨プラズマ切断装置
8日前
清水建設株式会社
移動式クリーンルーム
11日前
清水建設株式会社
通信装置、及び通信システム
4日前
清水建設株式会社
光源選定方法および光源選定システム
19日前
清水建設株式会社
誘虫予測方法および誘虫予測システム
19日前
清水建設株式会社
ソイルセメントの製造方法および二酸化炭素排出量削減方法
4日前
清水建設株式会社
四季成り性イチゴの栽培方法、四季成り性イチゴの栽培施設
20日前
清水建設株式会社
エアモビリティ運航システム、エアモビリティ運航方法、プログラム、及びハブポート
4日前
株式会社クラレ
水硬性組成物と繊維構造体とを含む未硬化体、該未硬化体の硬化体、および繊維構造体
18日前
個人
花立て
4日前
個人
納骨堂
1か月前
個人
作業補助器具
26日前
積水樹脂株式会社
塀
1か月前
個人
アンカー
1か月前
個人
住宅用建物
2か月前
有限会社瀬川興業
木製蓋
26日前
個人
免震構造
1か月前
三協立山株式会社
床
1か月前
株式会社創健
建築物
1か月前
積水樹脂株式会社
取付金具
3か月前
積水樹脂株式会社
取付金具
3か月前
積水樹脂株式会社
取付金具
3か月前
環境計測株式会社
局舎
5日前
三協立山株式会社
構造体
4日前
個人
連結具及び施工方法
2か月前
三協立山株式会社
構造体
2か月前
個人
セルフアライメント落葉籠
1か月前
株式会社オカムラ
ブース
19日前
三協立山株式会社
構造体
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ