TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024170947
公報種別
公開特許公報(A)
公開日
2024-12-11
出願番号
2023087737
出願日
2023-05-29
発明の名称
水準調整装置および水準調整方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
H01L
21/027 20060101AFI20241204BHJP(基本的電気素子)
要約
【課題】半導体製造装置の実際の状態を考慮して、半導体製造装置を水平に配置するための調整量を精度よく取得することが可能な水準調整装置を提供する。
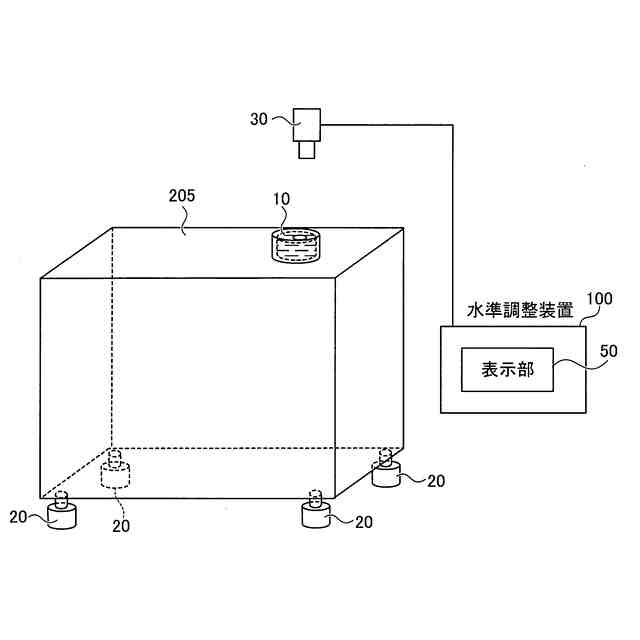
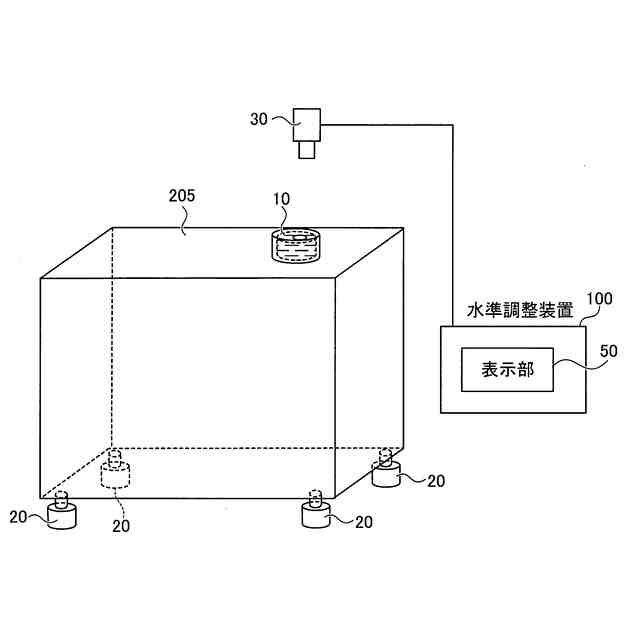
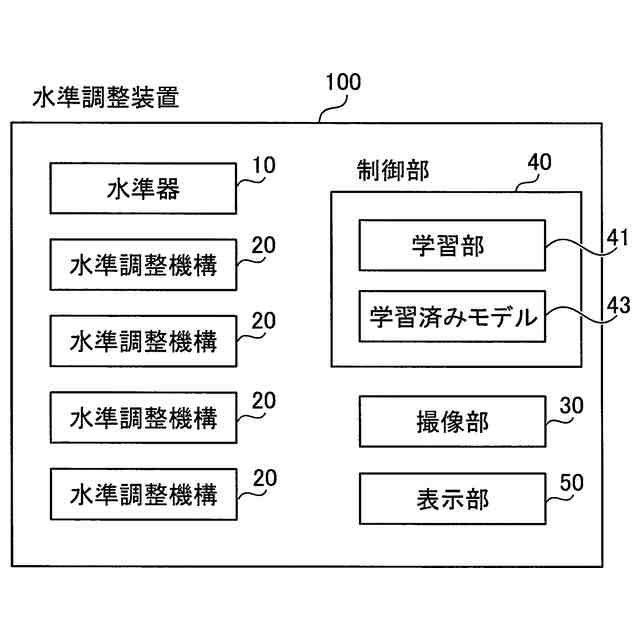
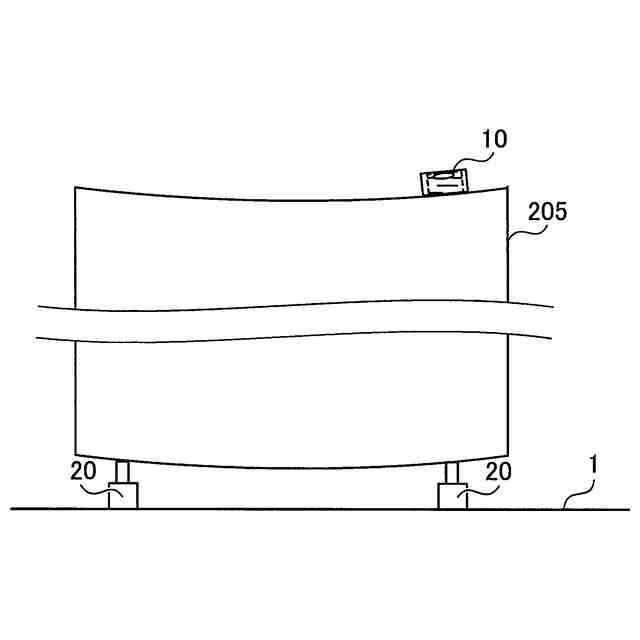
【解決手段】この水準調整装置100は、EFEM205の水平面に対する傾きを検出する水準器10と、EFEM205に配置された水準調整機構20と、水準器10により検出されたEFEM205の水平面に対する傾きに関するデータを入力とし、水準調整機構20の調整量を出力とする学習済みモデル43を用いることによって、水準調整機構20の各々の調整量を取得する制御部40と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
半導体製造装置の水平面に対する傾きを検出する水準器と、
前記半導体製造装置に配置された水準調整機構と、
前記水準器により検出された前記半導体製造装置の水平面に対する傾きに関するデータを入力とし、前記水準調整機構の調整量を出力とする学習済みモデルを用いることによって、前記水準調整機構の調整量を取得する制御部と、を備える、水準調整装置。
続きを表示(約 1,400 文字)
【請求項2】
前記学習済みモデルは、前記半導体製造装置に前記水準器が配置された状態での前記水準器が検出した前記半導体製造装置の傾きに関するデータが学習されることにより生成されている、請求項1に記載の水準調整装置。
【請求項3】
前記学習済みモデルは、撓んだ状態の前記半導体製造装置に前記水準器が配置された状態での前記水準器が検出した前記半導体製造装置の傾きに関するデータが学習されることにより生成されている、請求項2に記載の水準調整装置。
【請求項4】
前記学習済みモデルは、前記複数の水準調整機構のうちの少なくとも1つの調整量を変化させた場合の前記水準器の検出結果の変化が学習されることにより生成されている、請求項1に記載の水準調整装置。
【請求項5】
前記水準調整機構は、前記半導体製造装置の下方の4隅に各々配置され、
前記制御部は、1隅に配置された前記水準調整機構の調整量を変化させた場合の前記水準器の検出結果の変化に基づいて、床面から浮いている水準調整機構を特定する、請求項1に記載の水準調整装置。
【請求項6】
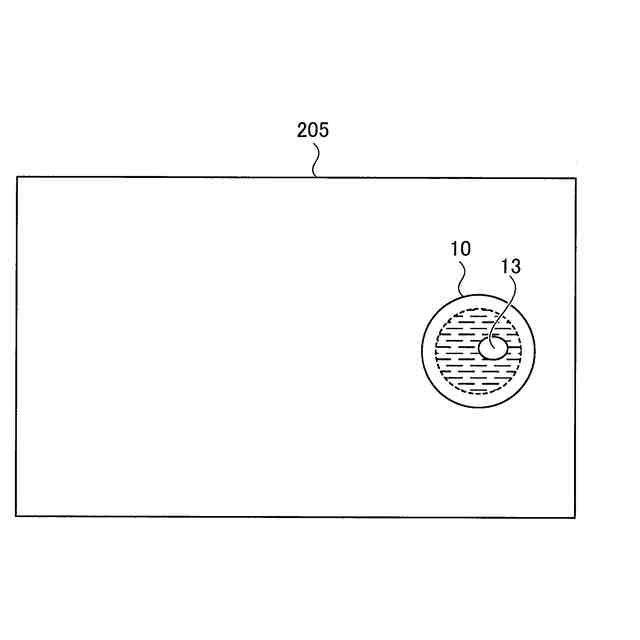
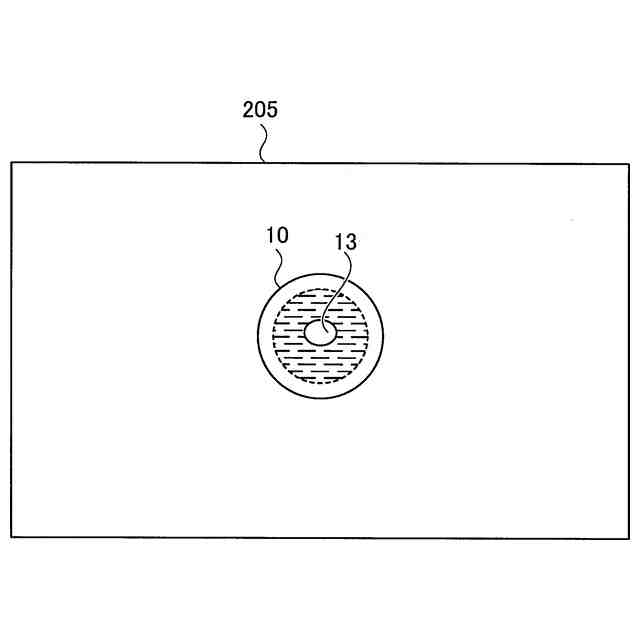
前記水準器は、容器中に収容された液体と、前記液体に含まれる気泡とを有する第1水準器を含み、
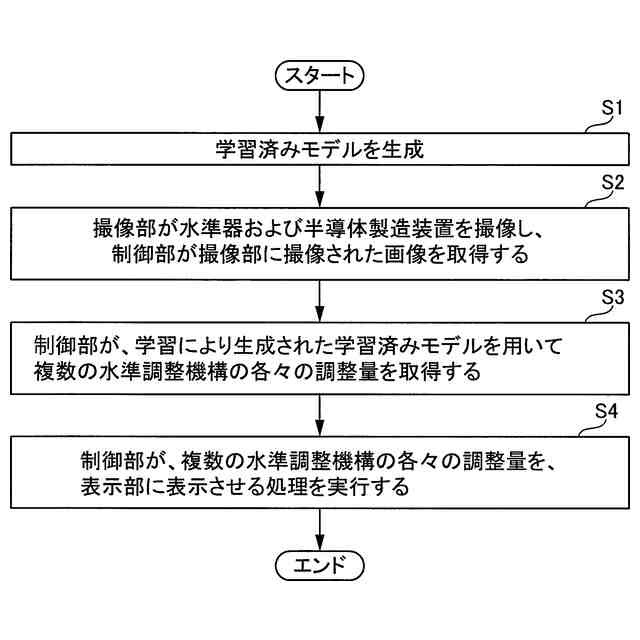
前記半導体製造装置に配置された前記第1水準器を撮像する撮像部を備え、
前記学習済みモデルは、前記撮像部に撮像された、前記半導体製造装置に配置された前記第1水準器の画像が学習されることにより生成されており、
前記制御部は、前記学習済みモデルを用いることによって、前記撮像部に撮像された前記第1水準器の画像に基づいて、前記複数の水準調整機構の各々の調整量を取得する、請求項1に記載の水準調整装置。
【請求項7】
前記水準器は、検出した前記半導体製造装置の水平面に対する傾きのデータを信号として出力する第2水準器を含み、
前記学習済みモデルは、前記半導体製造装置に配置された前記第2水準器が検出した水平面に対する傾きのデータの信号が学習されることにより生成されており、
前記制御部は、前記学習済みモデルを用いることによって、前記第2水準器により出力された信号に基づいて、前記複数の水準調整機構の各々の調整量を取得する、請求項1に記載の水準調整装置。
【請求項8】
前記制御部が取得した前記複数の水準調整機構の各々の調整量を表示する表示部を備える、請求項1に記載の水準調整装置。
【請求項9】
前記水準調整機構は、電動油圧ジャッキを含み、
前記制御部は、取得した前記複数の水準調整機構の各々の調整量に基づいて、前記複数の前記電動油圧ジャッキを動作させることにより、前記半導体製造装置が水平面に沿うように前記半導体製造装置の傾きを調整する、請求項1に記載の水準調整装置。
【請求項10】
半導体製造装置の水平面に対する傾きに関するデータを取得することと、
水準器により検出された前記半導体製造装置の水平面に対する傾きに関するデータを入力とし、前記半導体製造装置に配置された水準調整機構の調整量を出力とする学習済みモデルを用いることによって、前記水準調整機構の調整量を取得することと、を備える、水準調整方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、水準調整装置および水準調整方法の制御方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、半導体製造装置を床面に対して水平に設置するための水準調整装置が開示されている。特許文献1には、半導体製造装置の水準を調整する際において、作業者を支援する水平設置支援装置が開示されている。特許文献1の水平設置支援装置は、水準計測器と、データ処理部と、表示部と、を備えている。特許文献1の水平設置支援装置では、水準計測器は、半導体製造装置に載置されており、半導体製造装置の傾きを検出する。また、半導体製造装置の下面には、複数の脚部が配置されている。脚部は、アジャスタを含んでおり、作業者によりアジャスタが回転されることにより、脚部の高さが変更される。データ処理部は、水準計測器により検出された半導体製造装置の傾きのデータに基づいて、半導体製造装置が水平になるための、脚部のアジャスタの回転数を算出する。具体的には、アジャスタを1回転させたときの脚部の高さの変動量が既知である。また、データ処理部は、アジャスタを1回転させたときの脚部の高さの変動量と、半導体製造装置の傾きとの関係を表す数式を有している。なお、この数式では、アジャスタの回転数と半導体製造装置の傾きとが比例していると仮定されている。そして、データ処理部は、水準計測器により検出された半導体製造装置の傾きのデータに基づいて、いずれの脚部のアジャスタを何回転すれば、半導体製造装置が水平になるのかを算出する。そして、算出された脚部の各々のアジャスタの回転数が表示部に表示される。作業者は、表示部に表示されたアジャスタの回転数に基づいて、アジャスタを回転させる。これにより、半導体製造装置が水平になるように脚部の高さが調整される。
【先行技術文献】
【特許文献】
【0003】
特許第6724622号
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、半導体製造装置は、一般的に比較的大型であり重量が大きいため、半導体製造装置の下面に複数の脚部が配置されている場合、脚部の高さ調整が適切でないことに起因して半導体製造装置が撓むように変形する場合がある。このような場合において、上記特許文献1のように、アジャスタの回転数と半導体製造装置の傾きとが比例していると仮定されている数式を用いても、半導体製造装置を水平に配置するためのアジャスタの回転数が正確に算出できない。また、半導体製造装置の撓みなど、半導体製造装置の実際の状態を考慮した数式を求めるのは困難である。このため、半導体製造装置の実際の状態を考慮して、半導体製造装置を水平に配置するための調整量を精度よく取得することが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、半導体製造装置の実際の状態を考慮して、半導体製造装置を水平に配置するための調整量を精度よく取得することが可能な水準調整装置および水準調整方法を提供することである。
【課題を解決するための手段】
【0006】
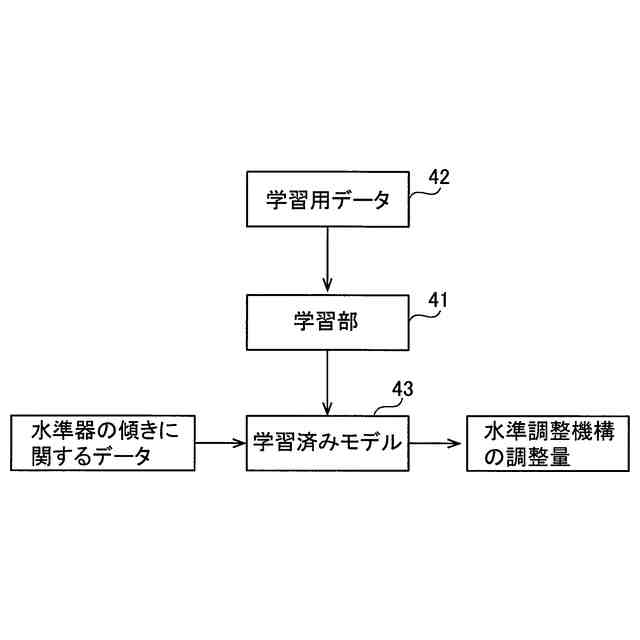
この開示の第1の局面による水準調整装置は、半導体製造装置の水平面に対する傾きを検出する水準器と、半導体製造装置に配置された水準調整機構と、水準器により検出された半導体製造装置の水平面に対する傾きに関するデータを入力とし、水準調整機構の調整量を出力とする学習済みモデルを用いることによって、水準調整機構の調整量を取得する制御部と、を備える。
【0007】
この開示の第1の局面による水準調整装置は、上記のように、制御部は、水準器により検出された半導体製造装置の水平面に対する傾きに関するデータを入力とし、水準調整機構の調整量を出力とする学習済みモデルを用いることによって、水準調整機構の調整量を取得する。これにより、学習済みモデルの生成においては、半導体製造装置が撓んでいる状態などの半導体製造装置の実際の状態と、複数の水準調整機構の調整量とを関連付けて学習することができるので、そのように学習された学習済みモデルを用いることによって、半導体製造装置の実際の状態を考慮して、半導体製造装置を水平に配置するための調整量を精度よく取得することができる。
【0008】
この開示の第2の局面による水準調整方法は、半導体製造装置の水平面に対する傾きに関するデータを取得することと、水準器により検出された半導体製造装置の水平面に対する傾きに関するデータを入力とし、半導体製造装置に配置された水準調整機構の調整量を出力とする学習済みモデルを用いることによって、水準調整機構の調整量を取得することと、を備える。
【0009】
この開示の第2の局面による水準調整方法は、上記のように、水準器により検出された半導体製造装置の水平面に対する傾きに関するデータを入力とし、半導体製造装置に配置された水準調整機構の調整量を出力とする学習済みモデルを用いることによって、水準調整機構の調整量を取得することを備える。これにより、学習済みモデルの生成においては、半導体製造装置が撓んでいる状態などの半導体製造装置の実際の状態と、複数の水準調整機構の調整量とを関連付けて学習することができるので、そのように学習された学習済みモデルを用いることによって、半導体製造装置の実際の状態を考慮して、半導体製造装置を水平に配置するための調整量を精度よく取得することが可能な水準調整方法を提供できる。
【発明の効果】
【0010】
本開示によれば、半導体製造装置の実際の状態を考慮して、半導体製造装置を水平に配置するための調整量を精度よく算出することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
電波吸収体
10日前
東レ株式会社
二次電池
1日前
個人
タワー式増設端子台
23日前
愛知電機株式会社
変圧器
8日前
電建株式会社
端子金具
15日前
SMK株式会社
コネクタ
15日前
太陽誘電株式会社
全固体電池
10日前
富士電機株式会社
半導体装置
15日前
株式会社カネカ
接着加工装置
10日前
株式会社カネカ
接着加工装置
10日前
三菱電機株式会社
端子カバー
1日前
株式会社水素パワー
接続構造
10日前
三菱電機株式会社
回路遮断器
15日前
桑野工業株式会社
同軸プラグ
28日前
日本特殊陶業株式会社
保持装置
15日前
個人
電波散乱方向制御板
1日前
トヨタ自動車株式会社
二次電池
15日前
株式会社村田製作所
コイル部品
8日前
TDK株式会社
電子部品
22日前
三菱電機株式会社
アンテナ装置
29日前
日機装株式会社
半導体発光装置
8日前
ローム株式会社
半導体装置
22日前
ローム株式会社
半導体装置
22日前
ローム株式会社
半導体装置
22日前
株式会社ダイヘン
搬送装置
15日前
トヨタ自動車株式会社
電池パック
22日前
住友電装株式会社
コネクタ
1日前
日本航空電子工業株式会社
接続器
22日前
ローム株式会社
半導体装置
22日前
日本電気株式会社
波長可変レーザ
14日前
株式会社島津製作所
X線撮影装置
15日前
トヨタ自動車株式会社
セルケース
15日前
株式会社三桂製作所
耐火コネクタ
21日前
日新イオン機器株式会社
イオン注入装置
3日前
ソニーグループ株式会社
発光素子
23日前
トヨタ自動車株式会社
電池パック
29日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ