TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024168890
公報種別
公開特許公報(A)
公開日
2024-12-05
出願番号
2023085924
出願日
2023-05-25
発明の名称
実装機
出願人
株式会社FUJI
代理人
弁理士法人 快友国際特許事務所
主分類
H05K
13/04 20060101AFI20241128BHJP(他に分類されない電気技術)
要約
【課題】オペレータの負担を低減することができる技術を提供する。
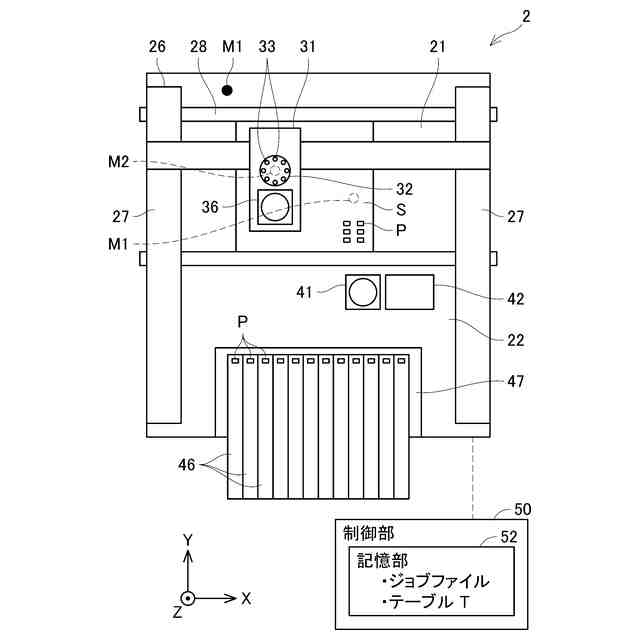
【解決手段】実装機は、基板に部品を実装する実装作業を実行する実装機であって、実装作業を実行するための複数の機能部と、複数の機能部を制御する制御部と、を備えている。制御部は、実装作業の実行中に複数の機能部の少なくとも1つに関するエラー情報又はエラー予知情報を取得する場合に、取得されるエラー情報又はエラー予知情報に対応する機能部について第1のキャリブレーションを実行してもよい。
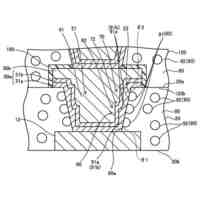
【選択図】図2
特許請求の範囲
【請求項1】
基板に部品を実装する実装作業を実行する実装機であって、
前記実装作業を実行するための複数の機能部と、
複数の前記機能部を制御する制御部と、を備え、
前記制御部は、前記実装作業の実行中に複数の前記機能部の少なくとも1つに関するエラー情報又はエラー予知情報を取得する場合に、取得される前記エラー情報又は前記エラー予知情報に対応する前記機能部について第1のキャリブレーションを実行する、実装機。
続きを表示(約 650 文字)
【請求項2】
前記制御部は、前記実装作業の開始時に複数の前記機能部について第2のキャリブレーションを実行し、
前記制御部は、
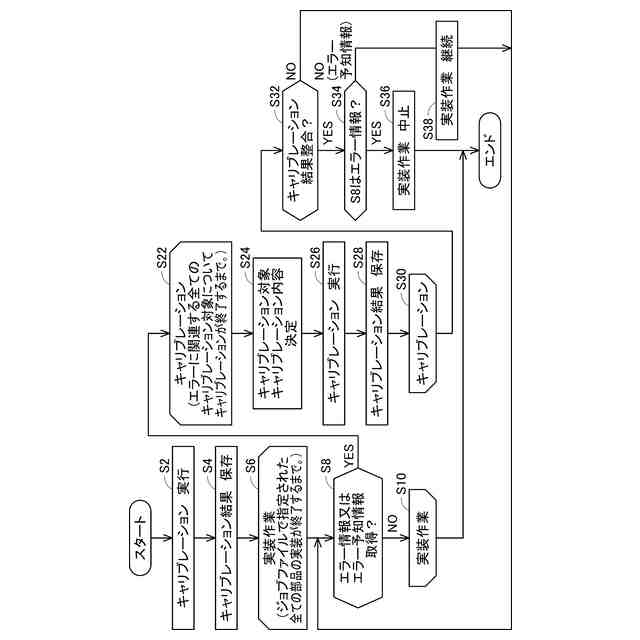
前記エラー情報を取得することに起因して前記第1のキャリブレーションを実行した際に、前記第1のキャリブレーションの結果と前記第2のキャリブレーションの結果とが整合すると判断する場合は、前記実装作業を中止し、
前記エラー予知情報を取得することに起因して前記第1のキャリブレーションを実行した際に、前記第1のキャリブレーションの結果と前記第2のキャリブレーションの結果とが整合すると判断する場合は、前記実装作業を継続する、請求項1に記載の実装機。
【請求項3】
前記制御部は、前記実装作業における誤差又は誤差の累積値が所定の閾値を超える場合に前記エラー予知情報を取得する、請求項1又は2に記載の実装機。
【請求項4】
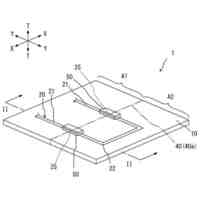
複数の前記機能部は、前記部品を前記基板に実装するヘッドと、前記実装機を上方から撮像可能なマークカメラと、前記ヘッドを下方から撮像可能なパーツカメラと、を含み、
前記制御部は、前記第1のキャリブレーションとして前記マークカメラが撮像した前記実装機に設けられている第1基準マークの撮像結果と、前記パーツカメラが撮像した前記ヘッドに設けられている第2基準マークの撮像結果とに基づいて、前記ヘッドおよび前記マークカメラの位置の補正値を算出する処理を実行する、請求項1又は2に記載の実装機。
発明の詳細な説明
【技術分野】
【0001】
本明細書に開示する技術は、基板に部品を実装する実装機に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、基板に部品を実装する実装機が開示されている。特許文献1の技術では、検査機から実装機に対してキャリブレーション(較正処理)を実行するよう通知がされ、実装機がキャリブレーションを実行する。特許文献1でのキャリブレーションは、実装機での部品を基板上に移動させる移動手段の移動距離の測定値と基準距離とに基づいて実際の移動距離を基準距離に合わせる処理をいう(段落0009参照)。
【先行技術文献】
【特許文献】
【0003】
特開2018-046307号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
部品の実装機では、例えば、部品の実際の実装位置が目標の実装位置に対して大きくズレるなどのエラーが発生したときに、実装機のオペレータが必要に応じてキャリブレーションを実行することがある。しかしながら、このような構成では、オペレータの負担が大きくなることがある。そこで本明細書は、オペレータの負担を低減することができる技術を提供する。
【課題を解決するための手段】
【0005】
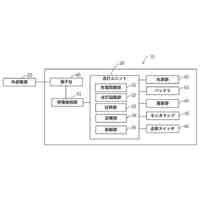
本明細書に開示する実装機は、基板に部品を実装する実装作業を実行する実装機であって、前記実装作業を実行するための複数の機能部と、複数の前記機能部を制御する制御部と、を備えている。前記制御部は、前記実装作業の実行中に複数の前記機能部の少なくとも1つに関するエラー情報又はエラー予知情報を取得する場合に、取得される前記エラー情報又は前記エラー予知情報に対応する前記機能部について第1のキャリブレーションを実行してもよい。
【0006】
上記の構成によれば、制御部がエラー情報又はエラー予知情報を取得する場合に、オペレータの判断や作業によらず、エラー情報又はエラー予知情報に対応する機能部について自動でキャリブレーションを実行することができる。そのため、オペレータの負担を低減することができる。
【0007】
なお、本明細書におけるキャリブレーションは、基準値と実測値とに基づいて補正値を求める処理としてもよい。例えば、キャリブレーション対象の機能部が部品を吸着保持するノズルである場合、キャリブレーションは、ノズルの位置の基準値とノズルの位置の実測値との差に基づいて、ノズルの位置を実測値の位置から基準値の位置まで補正するための補正値を算出する処理としてもよい。
【図面の簡単な説明】
【0008】
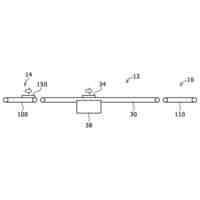
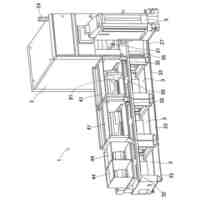
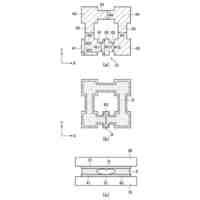
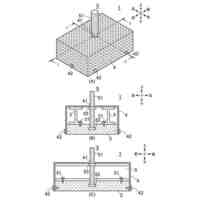
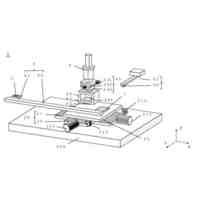
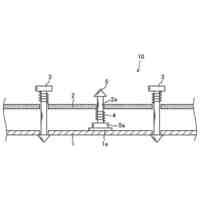
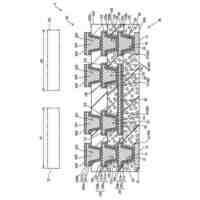
実施例の実装機を模式的に示す平面図。
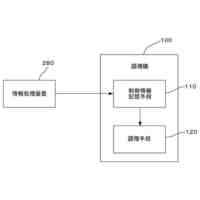
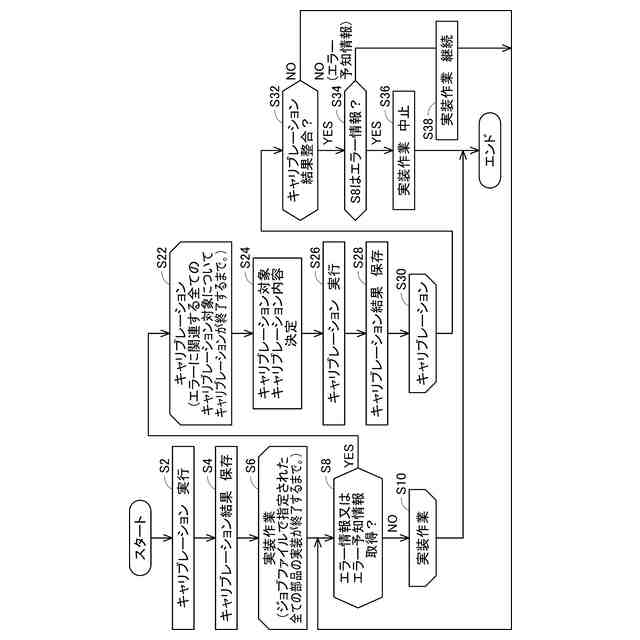
実施例の実装機で実行される処理のフローチャート。
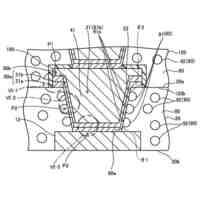
テーブルTの一例を示す図。
【発明を実施するための形態】
【0009】
以下に説明する実施例の主要な特徴を列記しておく。なお、以下に記載する技術要素は、それぞれ独立した技術要素であって、単独であるいは各種の組合せによって技術的有用性を発揮するものであり、出願時の請求項に記載の組合せに限定されるものではない。
【0010】
本明細書に開示する実装機では、前記制御部は、前記実装作業の開始時に複数の前記機能部について第2のキャリブレーションを実行してもよい。前記制御部は、前記エラー情報を取得することに起因して前記第1のキャリブレーションを実行した際に、前記第1のキャリブレーションの結果と前記第2のキャリブレーションの結果とが整合すると判断する場合は、前記実装作業を中止してもよい。前記制御部は、前記エラー予知情報を取得することに起因して前記第1のキャリブレーションを実行した際に、前記第1のキャリブレーションの結果と前記第2のキャリブレーションの結果とが整合すると判断する場合は、前記実装作業を継続してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
実装機
24日前
株式会社FUJI
装着機
3日前
株式会社FUJI
自動化用パレット
5日前
株式会社FUJI
押圧装置、及び押圧方法
17日前
株式会社FUJI
回路基板形成装置、および回路基板形成方法
24日前
株式会社FUJI
装着機
10日前
株式会社FUJI
部品実装機
3日前
株式会社FUJI
装着作業システム
3日前
株式会社FUJI
キッティング装置
3日前
株式会社FUJI
対基板作業システム
5日前
株式会社FUJI
部品供給ユニットの入出庫システム
10日前
個人
誘導加熱装置
3日前
日星電気株式会社
面状ヒータ
2か月前
日本精機株式会社
電子回路装置
2か月前
株式会社下村漆器店
調理機
1か月前
株式会社下村漆器店
調理機
1か月前
イビデン株式会社
配線基板
2か月前
イビデン株式会社
配線基板
2か月前
イビデン株式会社
配線基板
3か月前
イビデン株式会社
配線基板
2か月前
イビデン株式会社
配線基板
3か月前
富山県
EBG構造基板
1か月前
TDK株式会社
回路基板
2か月前
匠堂合同会社
電気設備の固定台
3か月前
JOHNAN株式会社
回路基板
2か月前
個人
出力アップ 電磁調理器について
3か月前
株式会社クラベ
基材及び面状ユニット
1か月前
東芝ライテック株式会社
照明装置
2か月前
イビデン株式会社
配線基板
12日前
イビデン株式会社
プリント配線板
17日前
東レエンジニアリング株式会社
実装装置
2か月前
イビデン株式会社
プリント配線板
3日前
シャープ株式会社
電子装置
10日前
イビデン株式会社
プリント配線板
1か月前
シャープ株式会社
照明装置
3か月前
太陽誘電株式会社
バルクフィーダ
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ