TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024166255
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2024153269,2023079394
出願日
2024-09-05,2020-03-05
発明の名称
手術位置合わせ用のシステム及び方法
出願人
マコー サージカル コーポレイション
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
A61B
34/20 20160101AFI20241121BHJP(医学または獣医学;衛生学)
要約
【課題】位置合わせ時間を減少させつつ、精度を増大させる位置合わせ方法を提供する。
【解決手段】手術位置合わせ用のシステムである。システムは、手術ナビゲーションシステム及び手術装置と通信状態にある少なくとも1つの演算装置を含みうる。少なくとも1つの演算装置は、a)大腿骨の外部表面上の場所に対応する外部骨位置合わせデータを受け取り、b)外部骨位置合わせデータに基づいて第1位置合わせ変換を算出し、c)第1位置合わせ変換に基づいて手術計画の第1骨除去計画を手術座標系に変換し、d)大腿骨の内管から場所又は向きデータの少なくとも1つに対応する内部骨管位置合わせデータを受け取り、e)外部及び内部骨管骨位置合わせデータの両方に基づいて第2位置合わせ変換を算出し、且つ、f)第2位置合わせ変換に基づいて手術計画の第2骨除去計画を手術座標系に変換している。
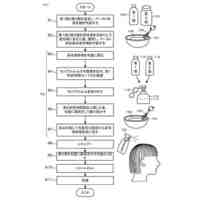
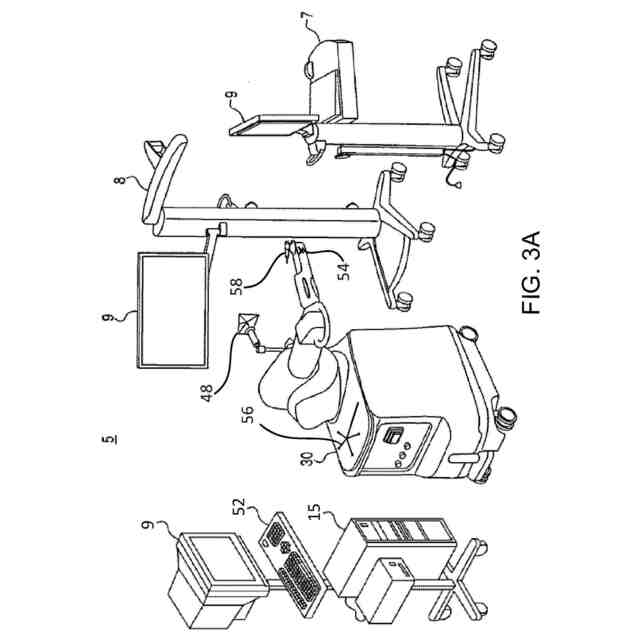
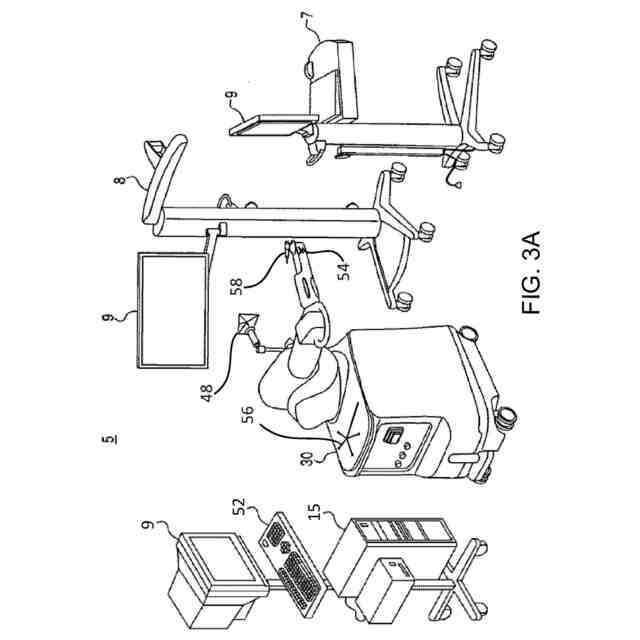
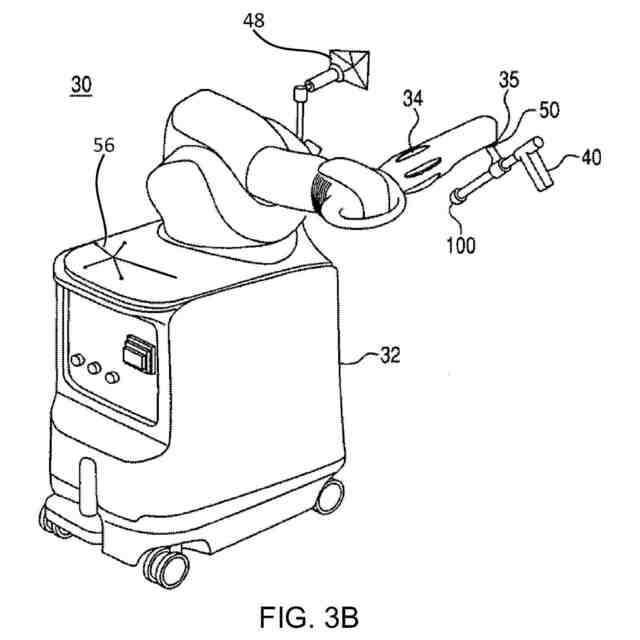
【選択図】図3A
特許請求の範囲
【請求項1】
手術計画において患者データを位置合わせするシステムであって、前記患者データは第1座標系における第1骨のものであり、前記手術計画は前記第1座標系とは異なる第2座標系において前記第1骨と関連付けられており、前記第1骨は、頭部分と、前記頭部分から延在するシャフト部分と、を有し、前記システムは、
a)追跡装置と、前記追跡装置によってその運動の際に追跡されるように構成された少なくとも1つのツールと、を有するナビゲーションシステムと通信状態にある少なくとも1つの演算装置を有し、前記少なくとも1つの演算装置は、前記手術計画を前記第2座標系内において保存しており、前記手術計画は、前記第1骨を表す仮想的骨モデルを有し、第1骨除去計画が前記仮想的骨モデルと関連付けられており、且つ、第2骨除去計画が前記仮想的骨モデルと関連付けられており、前記少なくとも1つの演算装置は、
i)前記第1骨と関連するデータの第1ポイントクラウドを受け取り、前記データの第1ポイントクラウドは、前記第1骨の前記頭部分と関連する第1データを有し、
ii)前記データの第1ポイントクラウドから第1位置合わせ変換を算出し、
iii)前記第1位置合わせ変換を使用して、前記第1骨除去計画が前記仮想的骨モデルとの関係において前記第2座標系内に存在していたような前記第1骨との関係における位置及び向きにおいて、前記手術計画の前記第1骨除去計画を前記第1座標系に変換し、
iv)前記第1骨と関連するデータの第2ポイントクラウドを受け取り、前記データの第2ポイントクラウドは、前記第1骨の前記シャフト部分の内部部分と関連する第2データを有し、
v)前記第1及び第2のデータのポイントクラウドの両方から第2位置合わせ変換を算出し、且つ、
vi)前記第2位置合わせ変換を使用して、前記第2骨除去計画が前記仮想的骨モデルとの関係において前記第2座標系内において存在していたような前記第1骨との関係における位置及び向きにおいて、前記手術計画の前記第2骨除去計画を前記第1座標系に変換する、システム。
続きを表示(約 310 文字)
【請求項2】
前記データの第1及び第2ポイントクラウドは、前記ナビゲーションシステムの前記追跡装置によってその運動の際に追跡されている手術装置を介して、術中において収集されている、請求項1に記載のシステム。
【請求項3】
前記第1骨除去計画は、前記仮想的骨モデルの仮想的管からの骨の部分的除去のための第1計画を含む、請求項1に記載のシステム。
【請求項4】
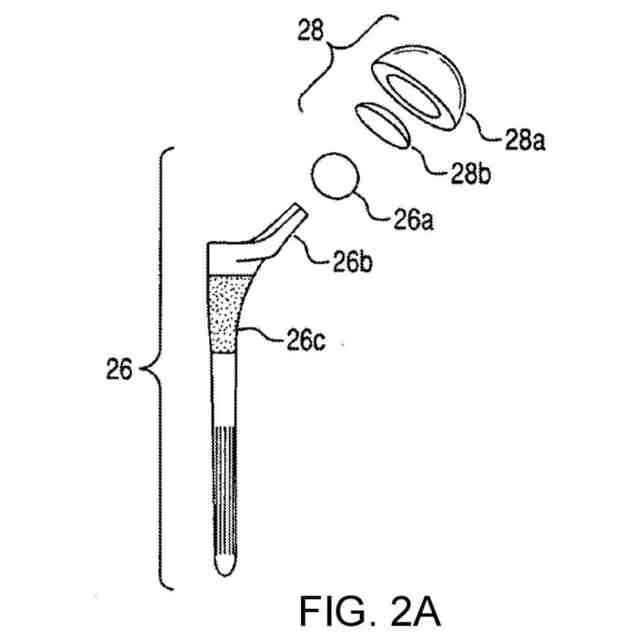
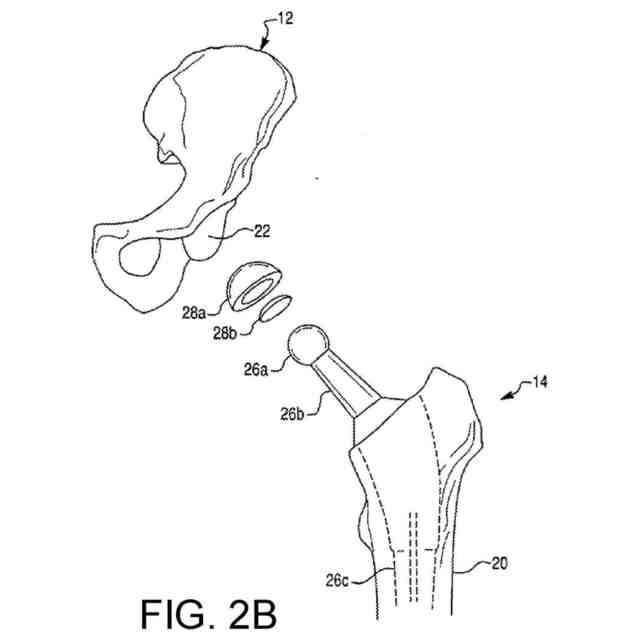
前記第2骨除去計画は、前記仮想的骨モデルの前記仮想的管からの骨のフル除去のための第2計画を含み、前記第1及び第2骨除去計画は、大腿骨インプラントのステムの埋植の準備を目的としたものである、請求項3に記載のシステム。
発明の詳細な説明
【技術分野】
【0001】
関連出願の相互参照
本出願は、2019年3月5日付けで出願された米国仮特許出願第62/814,057号の利益を主張するものであり、この特許文献は、引用により、そのすべてが本出願に包含される。
続きを表示(約 2,700 文字)
【0002】
本開示は、一般に、整形外科関節置換手術用の手術システムに関し、且つ、更に詳しくは、手術位置合わせの方法に関する。
【背景技術】
【0003】
ロボットシステムは、しばしば、手術手順又はその他の複雑なタスクなどの、高度な精度及び/又は正確性を必要とする用途において使用されている。このようなシステムは、自律型、遠隔操作型、及び対話型などの、様々なタイプのロボットを含みうる。
【0004】
対話型ロボットシステムは、関節置換手術などの、いくつかのタイプの手術の場合に、好適でありうるが、その理由は、これにより、外科医が、高度な精度及び/又は正確性を依然として実現しつつ、手術手順の直接的な実践的制御を維持することが可能になるからである。例えば、膝置換手術において、外科医は、膝インプラントなどの関節インプラントを受け入れるように骨を彫刻するべく、対話型の、触覚的にガイドされた(haptically guided)ロボットアームを受動的な方式で使用することができる。骨を彫刻するために、外科医は、骨の内部にポケットを切削するべくロボットアームに結合された切削ツール(例えば、回転バー(rotating burr))を運動させるように、ロボットアームを把持し且つ手動的に操作している。外科医が、予め定義された仮想的な切削境界内において、或いは、例えば、触覚物体によって定義された触覚境界内において、バーの先端を維持している限り、ロボットアームは、外科医が、ロボットアームを、本質的に重量を有していないものとして知覚するように、且つ、適宜、ロボットアームを運動させうるように、低摩擦及び低慣性により、自由に運動する。但し、外科医が、仮想的切削境界の外側において切削するべく、バーの先端を運動させるように試みた場合には、ロボットアームは、外科医が仮想的切削境界を越えて、バーの先端を運動させることを防止又は禁止する触覚フィードバック(例えば、強制的な抵抗力)を提供する。この結果、ロボットアームは、非常に正確な、反復可能な骨の切削を可能にしている。外科医が、対応する骨の切削の際に膝インプラント(例えば、膝蓋大腿コンポーネント)を手動的に埋植する際に、インプラントは、一般に、切削された骨と膝インプラントの構成及びこれらの間のインターフェイスに起因して、正確にアライメントされることになる。
【0005】
又、上述の対話型ロボットシステムは、異なる機能(例えば、リーミング、埋伏)、異なる構成(例えば、まっすぐなもの、オフセットされたもの)、及び異なる重さを有する複数の手術ツールの使用を必要としうる人工股関節置換手術において使用することもできる。様々なツールに対応するように設計されたシステムは、「SURGICAL SYSTEM FOR POSITIONING PROSTHETIC COMPONENT AND/OR FOR CONSTRAINING MOVEMENT OF SURGICAL TOOL」という名称の2010年9月29日付けで出願された12/894,071に記述されており、これは、引用により、すべてが本明細書において包含される。
【0006】
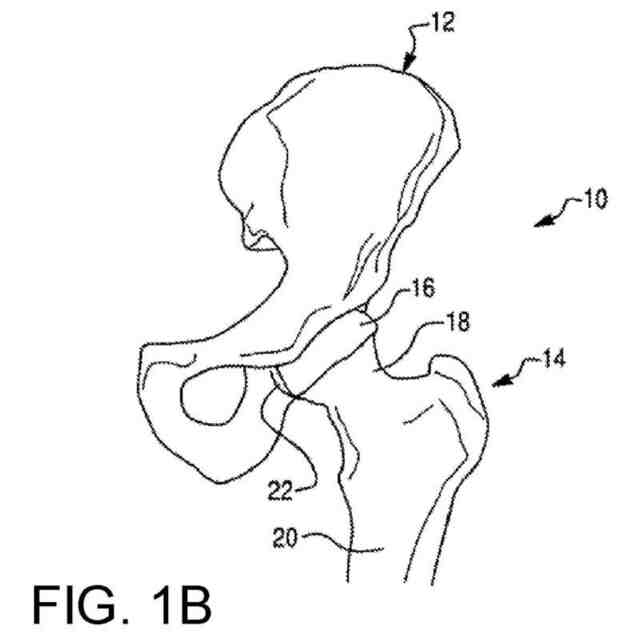
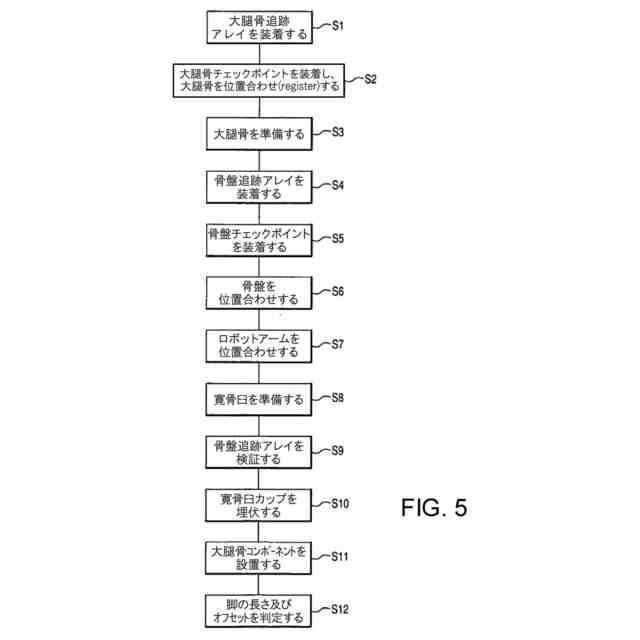
人工股関節置換手術のみならず、その他のロボット支援型の又は完全に自律型の手術手順において、骨盤及び大腿骨を含む患者の骨は、実際の物理的な骨のポーズ(即ち、位置及び回転の向き)を仮想的な骨モデルと相関させるべく、対応する仮想的又はコンピュータ骨モデルと術中において位置合わされている(registered)。又、患者の骨(物理空間)は、少なくとも1つの自由度を含みうる手術ロボット、触覚装置、又は手術ツール(例えば、回転バー)との関係においても、追跡されている。この結果、患者の骨(物理空間)に対して動作している際に、触覚装置が、その物理的な運動(例えば、バーリング)において制約されるように、コンピュータを介して仮想的な骨モデル上において制御及び定義される仮想的な切削又は触覚境界を患者の骨(物理空間)に対して適用することができる。
【0007】
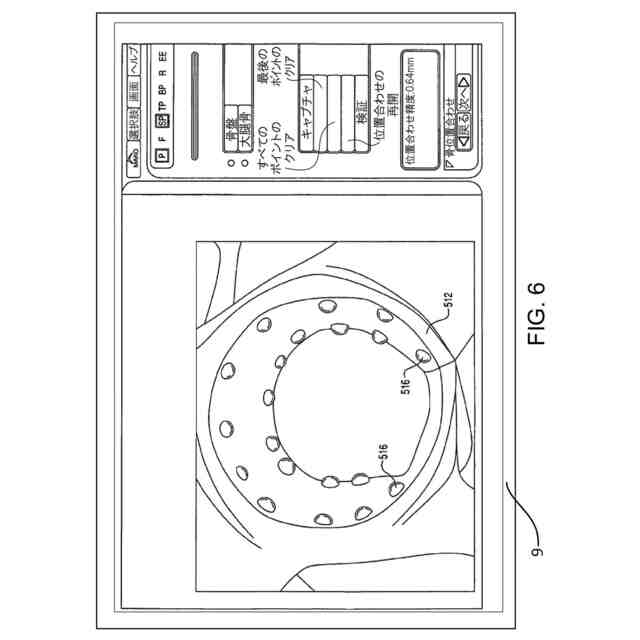
骨盤及び大腿骨の術中位置合わせ(registeration)は、難題となりうる。従って、当技術分野においては、特定のシステム及び方法が患者の骨盤及び大腿骨の位置合わせのために存在しているが、当技術分野においては、位置合わせ時間を減少させつつ、精度を増大させる位置合わせ方法に対するニーズが存在している。
【0008】
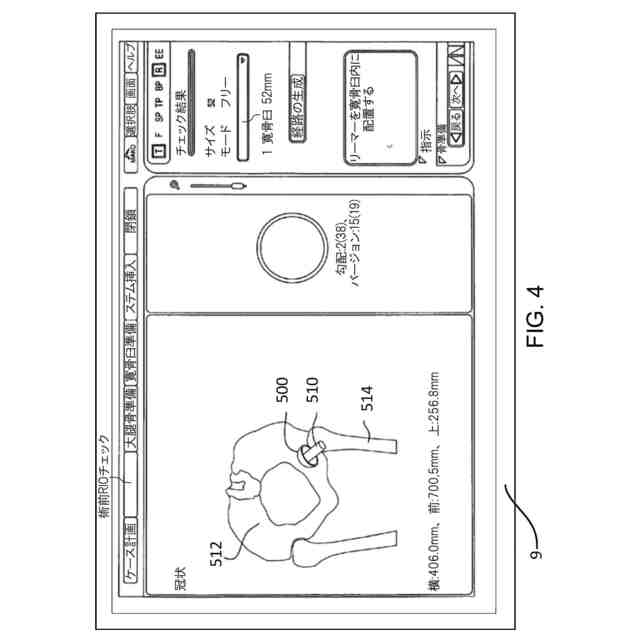
本開示の態様は、手術装置と患者の大腿骨を位置合わせするシステムを含みうる。大腿骨は、外部表面と、内管と、を含みうる。患者の大腿骨と手術装置は、手術座標系内に位置しうる。システムは、手術ナビゲーションシステム及び手術装置と通信状態にある少なくとも1つの演算装置を含みうる。手術ナビゲーションシステムは、手術装置を追跡することができる。少なくとも1つの演算装置は、手術計画を仮想座標系内において保存している。少なくとも1つの演算装置は、以下のステップのために構成されている。少なくとも1つの演算装置は、大腿骨の外部表面上の場所に対応する外部骨位置合わせデータを受け取ることができる。少なくとも1つの演算装置は、外部骨位置合わせデータに基づいて第1位置合わせ変換を算出することができる。少なくとも1つの演算装置は、第1位置合わせ変換に基づいて手術計画の第1骨除去計画を手術座標系に変換することができる。少なくとも1つの演算装置は、大腿骨の内管から場所又は向きデータの少なくとも1つに対応する内部骨管位置合わせデータを受け取ることができる。少なくとも1つの演算装置は、外部骨位置合わせデータ及び内部骨管位置合わせデータの両方に基づいて第2位置合わせ変換を算出することができる。少なくとも1つの演算装置は、第2位置合わせ変換に基づいて手術計画の第2骨除去計画を手術座標系に変換することができる。
【0009】
特定の例において、第1骨除去計画は、仮想座標空間内において定義することができると共に、患者の大腿骨の内管を表しうる仮想内管からの骨除去の第1部分用の第1座標場所を含みうる。
【0010】
特定の例において、第2骨除去計画は、仮想座標空間内において定義することができると共に、患者の大腿骨の内管を表しうる仮想内管からの骨除去の第2部分用の第2座標場所を含みうる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
穿刺補助具
5か月前
個人
歯の掃除具
25日前
個人
錠剤撒き器
3か月前
個人
男性用下着
4か月前
個人
入れ歯
6か月前
個人
蓋付きしびん
6か月前
個人
身体牽引装置
1か月前
個人
聴診器
6か月前
個人
乗馬テラピー
1か月前
個人
染毛方法
13日前
個人
介護浴槽
6か月前
個人
発熱器具
25日前
個人
磁器治療器
1か月前
個人
鼻腔拡張具
3か月前
個人
排便漏れ予防装具
4か月前
株式会社コロナ
脱臭機
3か月前
個人
入浴介護補助装置
6か月前
個人
動体視力強化装置
1か月前
個人
挟圧手工爪矯正具
3か月前
東レ株式会社
下肢着用具
1か月前
個人
血管硬化度算出方法
1か月前
東レ株式会社
吸収制御剤
11日前
個人
マウスピース
5か月前
個人
スプレー式目薬容器
7か月前
個人
口腔ケア用歯ブラシ
3か月前
個人
座椅子脱着式車椅子
6か月前
株式会社ナカニシ
生検針
1か月前
株式会社ファンケル
化粧料
1か月前
個人
圧排器具
4か月前
大正製薬株式会社
内服液剤
1か月前
株式会社ニデック
眼科装置
1か月前
株式会社ニデック
眼科装置
6か月前
株式会社ファンケル
化粧料
2か月前
株式会社ニデック
眼科装置
2か月前
株式会社ニデック
眼科装置
2か月前
株式会社ダリヤ
皮膚洗浄剤
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ