TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024166044
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023204241
出願日
2023-12-01
発明の名称
収穫装置、及び、収穫装置の制御方法
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
,
個人
主分類
A01D
46/30 20060101AFI20241121BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業の効率化を図る。
【解決手段】本開示の一側面に係る収穫装置は、エンドエフェクタを有するロボットと、農作物の収穫対象物における第1部位にエンドエフェクタを近づけるように、ロボットを制御する第1アプローチ制御部と、第1部位から収穫対象物における第2部位にエンドエフェクタを移動させて、エンドエフェクタに第2部位を保持させるように、ロボットを制御する第2アプローチ制御部と、エンドエフェクタにより第2部位を保持した状態で、収穫対象物を収穫するようにロボットを制御する収穫制御部と、を備える。
【選択図】図22
特許請求の範囲
【請求項1】
エンドエフェクタを有するロボットと、
農作物の収穫対象物における第1部位に前記エンドエフェクタを近づけるように、前記ロボットを制御する第1アプローチ制御部と、
前記第1部位から前記収穫対象物における第2部位に前記エンドエフェクタを移動させて、前記エンドエフェクタに前記第2部位を保持させるように、前記ロボットを制御する第2アプローチ制御部と、
前記エンドエフェクタにより前記第2部位を保持した状態で、前記収穫対象物を収穫するように前記ロボットを制御する収穫制御部と、
を備える、収穫装置。
続きを表示(約 1,700 文字)
【請求項2】
前記第2アプローチ制御部は、前記第1部位から、前記収穫対象物に連結された柄に向かって前記エンドエフェクタを移動させて、前記第1部位と前記柄との間に位置する前記第2部位を前記エンドエフェクタに保持させるように、前記ロボットを制御する、請求項1に記載の収穫装置。
【請求項3】
前記収穫対象物は、前記柄から反対側に延びるように形成されており、
前記第2アプローチ制御部は、前記収穫対象物の長手方向に沿って前記柄に向かって前記エンドエフェクタを移動させて、前記第2部位として、前記収穫対象物のうちの前記柄に連結された端部を前記エンドエフェクタに保持させるように前記ロボットを制御する、請求項2に記載の収穫装置。
【請求項4】
前記農作物の少なくとも一部を撮像して得られる1以上の画像のいずれかに基づいて、前記収穫対象物における前記エンドエフェクタがアクセス可能な部位を、前記第1部位として特定する部位特定部を更に備える、請求項2に記載の収穫装置。
【請求項5】
前記収穫対象物は、前記柄から反対側に延びるように形成されており、
前記第2アプローチ制御部は、前記収穫対象物の長手方向に沿って前記柄に向かって前記エンドエフェクタを移動させて、前記第2部位として、前記収穫対象物のうちの前記柄に連結された端部を前記エンドエフェクタに保持させるように前記ロボットを制御し、
前記部位特定部は、前記収穫対象物のうちの前記柄に連結された端部と前記柄とは反対側の端部との間に位置する領域から、前記第1部位を特定する、請求項4に記載の収穫装置。
【請求項6】
前記部位特定部は、
前記1以上の画像のいずれかに基づいて、前記収穫対象物における2以上の候補部位を特定することと、
前記2以上の候補部位のうちの、前記エンドエフェクタがアクセス可能であり、且つ、前記柄に最も近い部位を、前記第1部位として特定することと、を実行する、請求項5に記載の収穫装置。
【請求項7】
前記エンドエフェクタは、前記収穫対象物を側方から挟むように保持する一対の把持部を含み、
前記第1アプローチ制御部は、前記一対の把持部の間に前記第1部位が位置するように、前記ロボットが有するアームにより前記エンドエフェクタを前記第1部位に移動させ、
前記第2アプローチ制御部は、前記一対の把持部の間に前記収穫対象物が位置する状態を維持しつつ、前記エンドエフェクタを前記第2部位に移動させるように、前記ロボットを制御する、請求項1に記載の収穫装置。
【請求項8】
前記第1アプローチ制御部は、前記エンドエフェクタを前記第1部位に近づけて、前記一対の把持部の間の間隔を小さくして前記第1部位に接触するように前記ロボットを制御する、請求項7に記載の収穫装置。
【請求項9】
保持判定部を更に備え、
前記エンドエフェクタは、前記一対の把持部の間の間隔を変更するモータを更に含み、
前記第1アプローチ制御部は、
前記アームにより、前記一対の把持部を前記第1部位に近づけることと、
前記一対の把持部の間の間隔が小さくなるように、前記モータにより前記一対の把持部を駆動することと、
前記一対の把持部が受ける反力に基づいて、前記モータによる駆動を停止させることと、を実行し、
前記保持判定部は、前記モータによる前記一対の把持部の駆動を停止したときの前記モータの位置に基づいて、前記一対の把持部が前記収穫対象物を保持したか否かを判定する、請求項8に記載の収穫装置。
【請求項10】
前記エンドエフェクタは、前記一対の把持部の間の間隔を変更するモータを更に含み、
前記第2アプローチ制御部は、前記第1部位から前記第2部位まで前記エンドエフェクタを移動させる間の前記間隔が、前記第1アプローチ制御部が前記第1部位まで前記エンドエフェクタを移動させる間の前記間隔よりも小さくなるように、前記モータを制御する、請求項7に記載の収穫装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、収穫装置、及び、収穫装置の制御方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、果菜類の収穫装置が開示されている。特許文献2には、果菜分離装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開平8-103138号公報
特開2021-23164号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、作業の効率化に有用な収穫装置、及び、収穫装置の制御方法を提供する。
【課題を解決するための手段】
【0005】
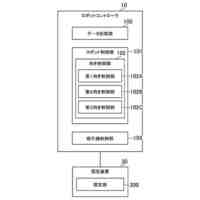
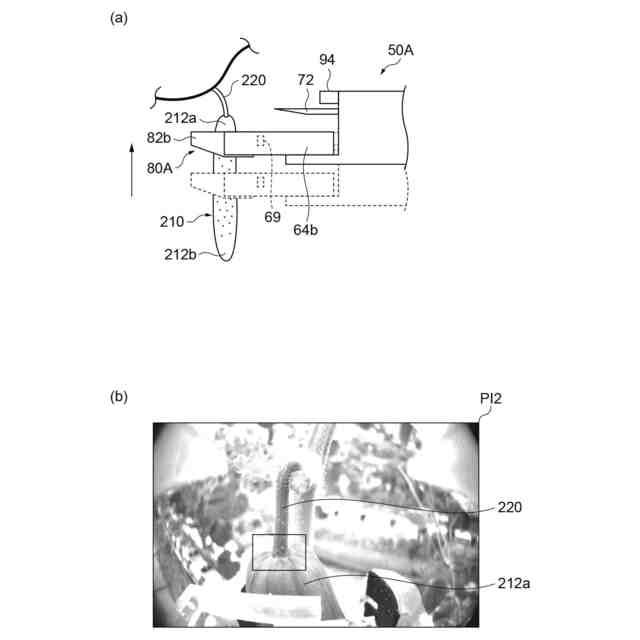
本開示の一側面に係る収穫装置は、エンドエフェクタを有するロボットと、農作物の収穫対象物における第1部位にエンドエフェクタを近づけるように、ロボットを制御する第1アプローチ制御部と、第1部位から収穫対象物における第2部位にエンドエフェクタを移動させて、エンドエフェクタに第2部位を保持させるように、ロボットを制御する第2アプローチ制御部と、エンドエフェクタにより第2部位を保持した状態で、収穫対象物を収穫するようにロボットを制御する収穫制御部と、を備える。
【0006】
本開示の一側面に係る収穫装置は、ロボットと、農作物の少なくとも一部を撮像して得られる撮像画像から、農作物における収穫対象物を検出する対象検出部と、検出された収穫対象物において特定の部位を認識する認識部と、特定の部位を認識したか否かに応じて、相異なる動作により収穫対象物を収穫するように、ロボットを制御する収穫制御部と、を備える。
【0007】
本開示の一側面に係る収穫装置は、ロボットと、農作物の少なくとも一部を撮像して得られる撮像画像から、農作物における収穫対象物を検出する対象検出部と、検出された収穫対象物において特定の部位を認識する認識部と、特定の部位が認識された場合に、収穫対象物を収穫するようにロボットを制御する収穫制御部と、特定の部位が認識されない場合に、収穫対象物の個体情報を別の装置に送信する情報通知部と、を備える。
【0008】
本開示の一側面に係る収穫装置の制御方法は、農作物の収穫対象物における第1部位にロボットが有するエンドエフェクタを近づけるように、ロボットを制御することと、第1部位から収穫対象物における第2部位にエンドエフェクタを移動させて、エンドエフェクタに第2部位を保持させるように、ロボットを制御することと、エンドエフェクタにより第2部位を保持した状態で、収穫対象物を収穫するようにロボットを制御することと、を含む。
【0009】
本開示の一側面に係る収穫装置の制御方法は、農作物の少なくとも一部を撮像して得られる撮像画像から、農作物における収穫対象物を検出することと、検出された収穫対象物において特定の部位を認識することと、特定の部位を認識したか否かに応じて、相異なる動作により収穫対象物を収穫するように、ロボットを制御することと、を含む。
【発明の効果】
【0010】
本開示によれば、作業の効率化に有用な収穫装置、及び、収穫装置の制御方法が提供される。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
ロボット
3日前
株式会社安川電機
ロボット
3日前
株式会社安川電機
ロボット
3日前
株式会社安川電機
ロボット
2か月前
株式会社安川電機
電力変換装置及び制御方法
1か月前
株式会社安川電機
ロボット及び基板搬送装置
3日前
株式会社安川電機
電力変換装置及び制御方法
1か月前
株式会社安川電機
収穫装置、及び、収穫装置の制御方法
1か月前
株式会社安川電機
ロボットシステム及びロボット制御方法
3日前
株式会社安川電機
エンコーダ、サーボモータ、サーボシステム
28日前
株式会社安川電機
ロボット制御システム及び梱包資材の切断方法
1日前
株式会社安川電機
基板搬送ロボット、基板搬送システム、及び基板搬送方法
1か月前
株式会社安川電機
ロボット制御システム、ロボット制御方法、及びプログラム
14日前
株式会社安川電機
ロボット制御システム、ロボット制御方法、及びプログラム
14日前
株式会社安川電機
ロボットシステム、キャリブレーションツール、及びキャリブレーション方法
4か月前
株式会社安川電機
スイッチングモジュール、電力変換装置、及び、電力変換装置の製造方法
2か月前
株式会社安川電機
ロボットシステム、プランニングシステム、ロボット制御方法、およびプランニングプログラム
1か月前
個人
除草具
3日前
個人
草抜き機
1か月前
個人
動物撃退装置
1か月前
個人
ルアー
28日前
個人
殺虫スプレー
14日前
個人
ベアスタンガン
3日前
個人
播種機と播種方法
29日前
井関農機株式会社
収穫機
6日前
井関農機株式会社
収穫機
6日前
個人
獣罠捕獲検知システム
3日前
井関農機株式会社
作業車両
14日前
個人
蔬菜栽培器
1か月前
個人
植物栽培装置
29日前
株式会社誠和
接触構造体
14日前
個人
動物の尿漏れ防止具
17日前
個人
根掛りしないイカ用疑似餌
3日前
個人
回転式草刈刃
1か月前
個人
植物支持装置
29日前
個人
有害獣類の忌避装置
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ