TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024180098
公報種別
公開特許公報(A)
公開日
2024-12-26
出願番号
2023099550
出願日
2023-06-16
発明の名称
エンコーダ、サーボモータ、サーボシステム
出願人
株式会社安川電機
代理人
弁理士法人第一テクニカル国際特許事務所
主分類
G01D
5/245 20060101AFI20241219BHJP(測定;試験)
要約
【課題】小型化が可能なエンコーダ、サーボモータ及びサーボシステムを提供する。
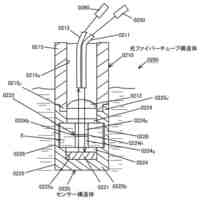
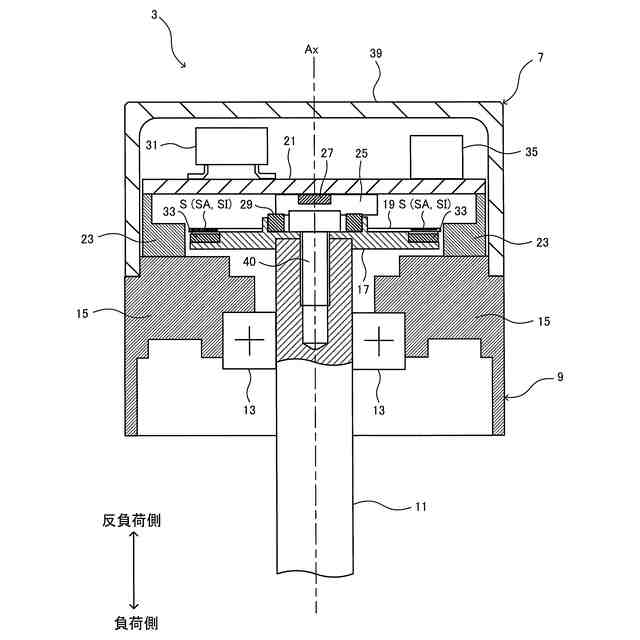
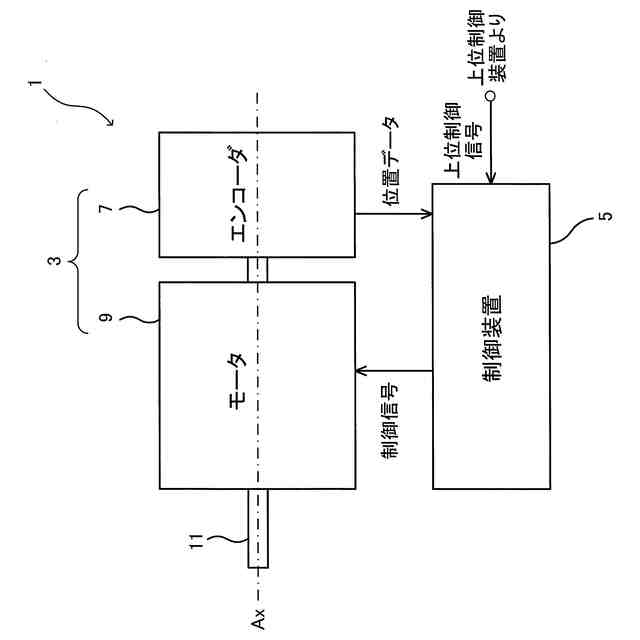
【解決手段】エンコーダ7は、回転軸心Ax周りに回転可能なハブ17と、ハブ17に固定され、リング状のスケールSが形成されたディスク19と、ディスク19に対向するように配置され、スケールSを検出する光学モジュール25と、ディスク19よりも回転軸心Axの方向における負荷側に配置され、ハブ17に固定された磁石33と、ディスク19よりも回転軸心Axの方向における反負荷側に配置され、磁石33の磁気を検出するトリガ信号発生器31と、を有する。
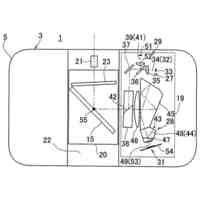
【選択図】図2
特許請求の範囲
【請求項1】
回転軸心周りに回転可能な回転体と、
前記回転体に固定され、リング状のスケールが形成されたディスクと、
前記ディスクに対向するように配置され、前記スケールを検出する光学モジュールと、
前記ディスクよりも前記回転軸心の方向における一方側に配置され、前記回転体に固定された第1磁石と、
前記ディスクよりも前記回転軸心の方向における他方側に配置され、前記第1磁石の磁気を検出する第1磁気検出部と、
を有する、エンコーダ。
続きを表示(約 1,100 文字)
【請求項2】
前記回転体は、
磁性材料で構成され、
前記第1磁石の前記一方側を覆うように形成されている、
請求項1に記載のエンコーダ。
【請求項3】
前記ディスクは、
非磁性材料で構成され、
前記回転体は、
前記ディスクが前記第1磁石の前記他方側を覆うように、前記ディスクを支持し、
前記第1磁気検出部は、
前記ディスクを透過した前記第1磁石の磁気を検出する、
請求項2に記載のエンコーダ。
【請求項4】
前記回転軸心の方向において前記ディスクと前記第1磁石との間に形成された隙間を有する、
請求項3に記載のエンコーダ。
【請求項5】
前記回転体は、
前記回転軸心を中心とする径方向の内周側に位置する内周部と、
前記内周部よりも前記径方向の外周側に位置し、前記回転軸心の方向の厚みが前記内周部よりも薄い外周部と、を有し、
前記ディスクは、
前記内周部の前記他方側に配置され、
前記第1磁石は、
前記外周部の前記他方側に配置される、
請求項3に記載のエンコーダ。
【請求項6】
前記回転体は、
前記内周部の前記他方側の表面が、前記外周部に配置された前記第1磁石の前記他方側の表面よりも、前記他方側に突出し、
前記ディスクは、
前記径方向において前記内周部よりも前記外周側に突出する、
請求項5に記載のエンコーダ。
【請求項7】
前記内周部の前記径方向における外径は、
前記スケールの前記径方向における内径よりも小さい、
請求項5又は6に記載のエンコーダ。
【請求項8】
前記第1磁石は、
それぞれ前記回転軸心方向に磁極を有し、隣接するもの同士の前記磁極が異なるように、前記回転軸心周りの周方向に沿って相互に隙間をあけて配置された複数の磁石を有する、
請求項2に記載のエンコーダ。
【請求項9】
前記第1磁石が有する前記複数の磁石は、
それぞれ円弧形状を有する、
請求項8に記載のエンコーダ。
【請求項10】
前記回転軸心上の位置で前記回転体に固定された第2磁石と、
前記第2磁石に対向するように配置され、前記第2磁石の磁気を検出する第2磁気検出部と、をさらに有し、
前記回転体は、
前記第1磁石が前記回転軸心を中心とする径方向において前記第2磁石よりも外周側に配置されるように、前記第1磁石を支持する、
請求項1に記載のエンコーダ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
開示の実施形態は、エンコーダ、サーボモータ、及びサーボシステムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、移動部の位置情報を検出する検出部を含む位置検出系と、移動部の移動によって電気信号が発生する電気信号発生部と、電気信号発生部で発生する電気信号に応じて、位置検出系で消費される電力の少なくとも一部を供給するバッテリーと、を備えるエンコーダ装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2017/126338号
【発明の概要】
【発明が解決しようとする課題】
【0004】
エンコーダ装置においては、さらなる小型化が要望されている。
【0005】
本発明はこのような問題点に鑑みてなされたものであり、小型化することが可能なエンコーダ、サーボモータ、及びサーボシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明の一の観点によれば、回転軸心周りに回転可能な回転体と、前記回転体に固定され、リング状のスケールが形成されたディスクと、前記ディスクに対向するように配置され、前記スケールを検出する光学モジュールと、前記ディスクよりも前記回転軸心の方向における一方側に配置され、前記回転体に固定された第1磁石と、前記ディスクよりも前記回転軸心の方向における他方側に配置され、前記第1磁石の磁気を検出する第1磁気検出部と、を有する、エンコーダが適用される。
【0007】
また、本発明の別の観点によれば、回転子が固定子に対して回転するモータと、前記回転子の位置、速度、加速度の少なくとも1つを検出する、上記エンコーダと、を有する、サーボモータが適用される。
【0008】
また、本発明の別の観点によれば、回転子が固定子に対して回転するモータと、前記回転子の位置、速度、加速度の少なくとも1つを検出する、上記エンコーダと、前記エンコーダの検出結果に基づいて前記モータを制御する制御装置と、を有する、サーボシステムが適用される。
【発明の効果】
【0009】
本発明のエンコーダ等によれば、小型化することができる。
【図面の簡単な説明】
【0010】
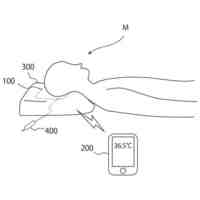
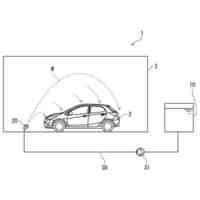
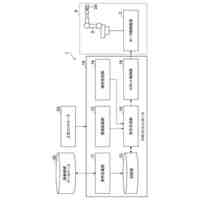
サーボシステムの全体構成の一例を表す説明図である。
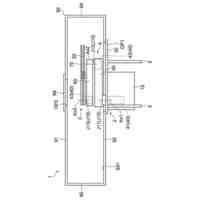
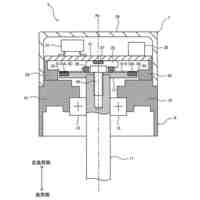
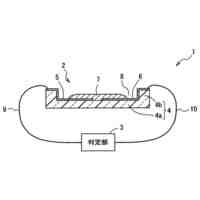
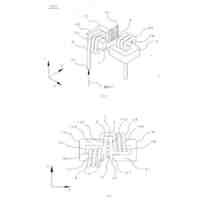
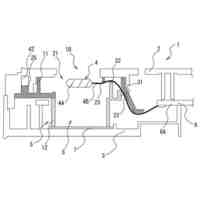
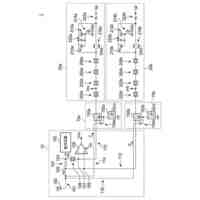
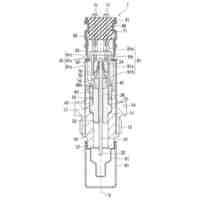
エンコーダの全体構成の一例を表す、図3のII-II断面に相当する断面図である。
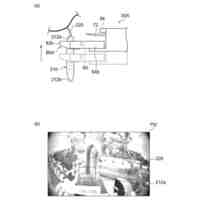
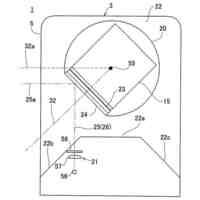
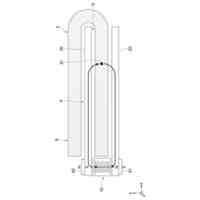
エンコーダの全体構成の一例を基板側から見た上面図である。
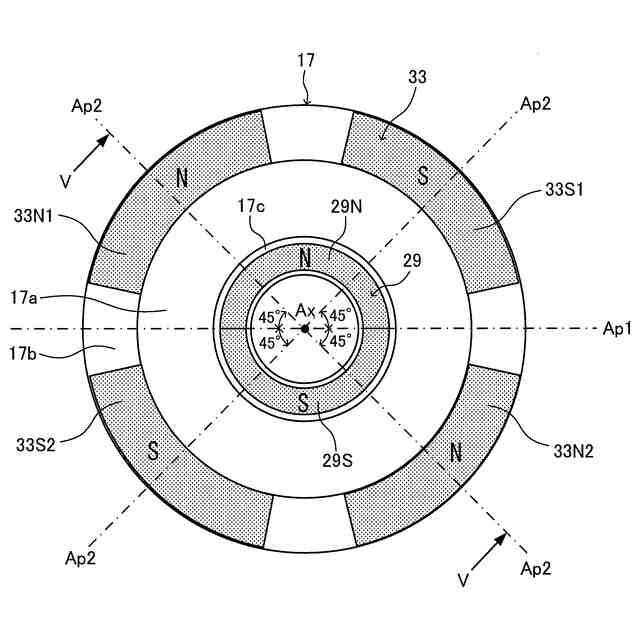
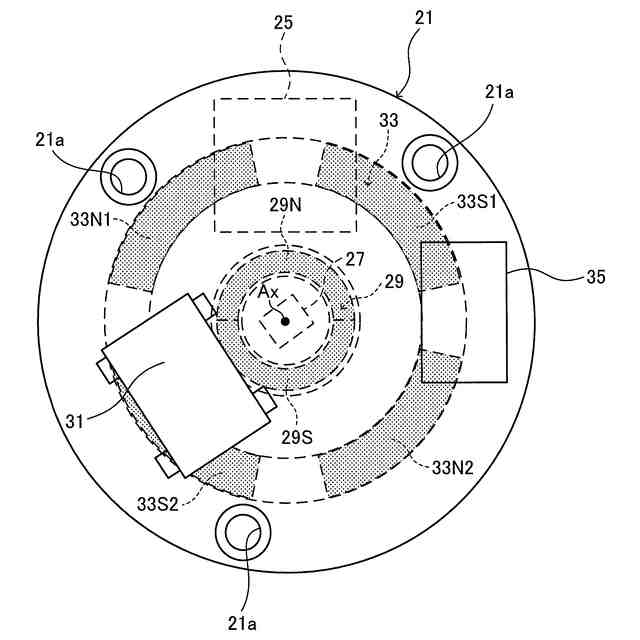
磁石の配置構成の一例を表す、ハブを基板側からみた平面図である。
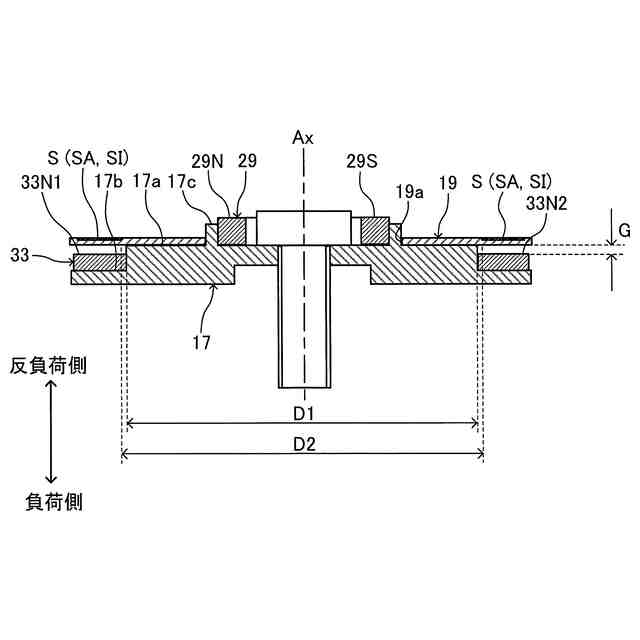
図4のV-V断面に相当するハブの断面図である。
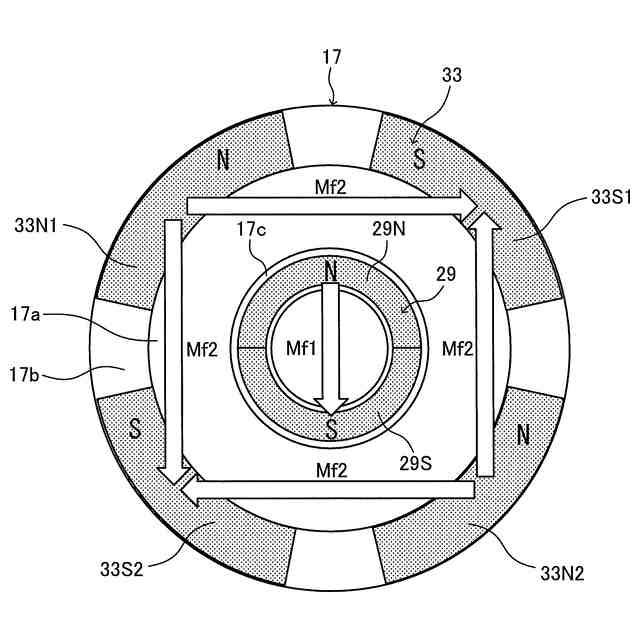
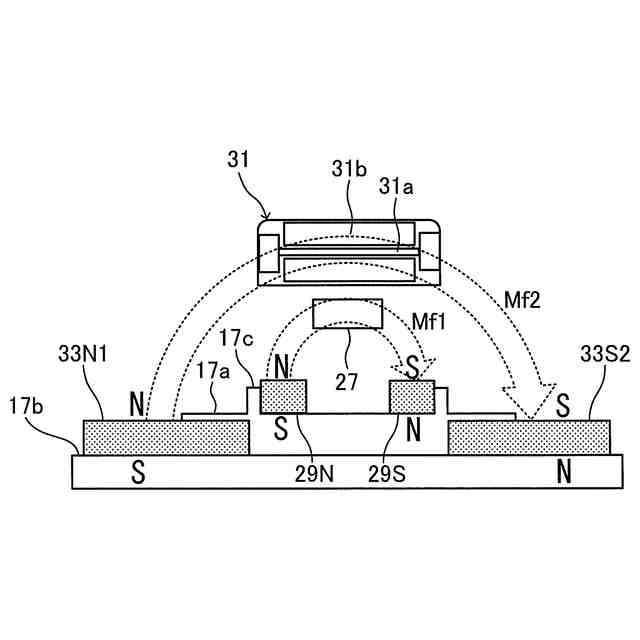
磁石による磁束の流れの一例を説明するための平面図である。
磁石による磁束の流れの一例を説明するための側面図である。
磁気検出部と磁石、及び、トリガ信号発生器と磁石、の位置関係の一例を表す基板の平面図である。
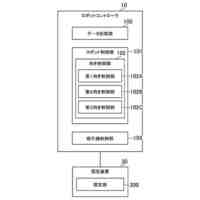
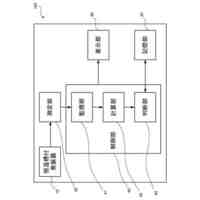
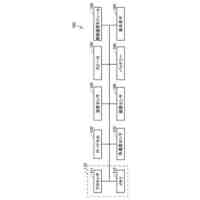
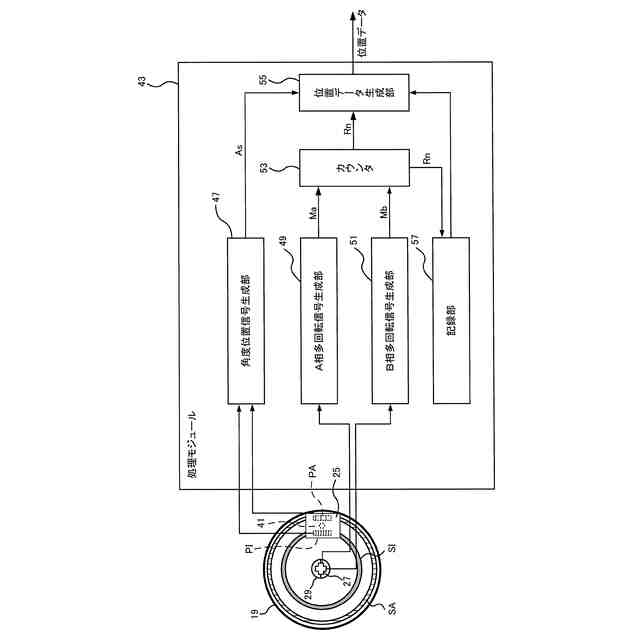
処理モジュールの機能構成の一例を表すブロック図である。
ディスクが正転する場合におけるトリガ信号発生時の磁石の角度位置の一例を表す説明図である。
ディスクが逆転する場合におけるトリガ信号発生時の磁石の角度位置の一例を表す説明図である。
トリガ信号の位相角のヒステリシスが大きい場合における、トリガ信号、A相多回転信号、及びB相多回転信号の波形の一例を表す説明図である。
トリガ信号の位相角のヒステリシスが小さい場合における、トリガ信号、A相多回転信号、及びB相多回転信号の波形の一例を表す説明図である。
磁石間の隙間に非磁性材を充填する変形例における、磁石の配置構成の一例を表す、ハブを基板側からみた平面図である。
ハブを非磁性材料で構成し、磁石を周方向に着磁する変形例における、磁石による磁束の流れの一例を説明するための平面図である。
ハブを非磁性材料で構成し、磁石を周方向に着磁する変形例における、磁石による磁束の流れの一例を説明するための側面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
ロボット
3日前
株式会社安川電機
ロボット
3日前
株式会社安川電機
ロボット
3日前
株式会社安川電機
ロボット及び基板搬送装置
3日前
株式会社安川電機
電力変換装置及び制御方法
1か月前
株式会社安川電機
電力変換装置及び制御方法
1か月前
株式会社安川電機
収穫装置、及び、収穫装置の制御方法
1か月前
株式会社安川電機
ロボットシステム及びロボット制御方法
3日前
株式会社安川電機
エンコーダ、サーボモータ、サーボシステム
28日前
株式会社安川電機
ロボット制御システム及び梱包資材の切断方法
1日前
株式会社安川電機
基板搬送ロボット、基板搬送システム、及び基板搬送方法
1か月前
株式会社安川電機
ロボット制御システム、ロボット制御方法、及びプログラム
14日前
株式会社安川電機
ロボット制御システム、ロボット制御方法、及びプログラム
14日前
株式会社安川電機
ロボットシステム、プランニングシステム、ロボット制御方法、およびプランニングプログラム
1か月前
株式会社大真空
センサ
28日前
株式会社大真空
センサ
8日前
株式会社大真空
センサ
3日前
甲神電機株式会社
電流センサ
14日前
日本精機株式会社
車両用計器
6日前
個人
シート形状体温計
1か月前
日本精機株式会社
コントローラ
16日前
CKD株式会社
検査装置
6日前
株式会社トプコン
測量装置
6日前
株式会社トプコン
測量装置
6日前
日本電波工業株式会社
風速測定装置
28日前
アズビル株式会社
漏液センサ
3日前
株式会社諸岡
自動運転作業機
3日前
株式会社チノー
液浸プローブ
1か月前
株式会社国際電気
治具セット
6日前
三菱重工冷熱株式会社
降雨装置
16日前
トヨタ自動車株式会社
解析装置
28日前
ローム株式会社
半導体装置
15日前
株式会社デンソー
検出装置
16日前
シャープ株式会社
測定装置
6日前
日本特殊陶業株式会社
ガスセンサ
14日前
株式会社豊田自動織機
車両
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ