TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024165466
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023081691
出願日
2023-05-17
発明の名称
四肢動物の生体信号処理方法、生体信号処理装置、生体信号処理システム、プログラム、および記憶媒体
出願人
東洋紡株式会社
代理人
主分類
A01K
29/00 20060101AFI20241121BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】四肢動物が臥位であると推測される時間期間を特定し、当該時間期間における当該四肢動物の生体信号の処理を行うことを可能とする技術を提供することを目的とする。
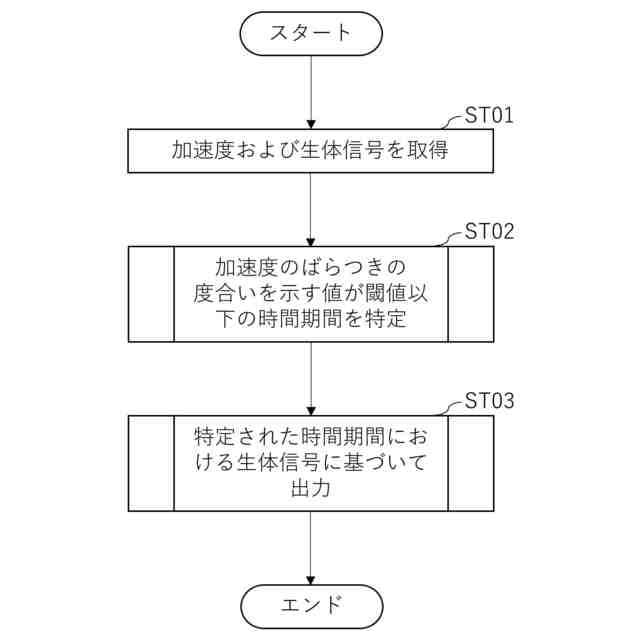
【解決手段】この発明の一態様の四肢動物の生体信号処理方法は、四肢動物の生体信号と、前記四肢動物の動きに伴う加速度とを取得することと、前記加速度の値のばらつきの度合いを示す値が第1の閾値以下の第1の時間期間を特定することと、前記生体信号のうちの前記第1の時間期間における生体信号に基づいて出力を行うこととを含む。
【選択図】図4
特許請求の範囲
【請求項1】
コンピュータおよび記憶媒体を備える装置が実行する四肢動物の生体信号処理方法であって、
四肢動物の生体信号と、前記四肢動物の動きに伴う加速度とを取得することと、
前記加速度の値のばらつきの度合いを示す値が第1の閾値以下の第1の時間期間を特定することと、
前記生体信号のうちの前記第1の時間期間における生体信号に基づいて出力を行うことと
を含む、生体信号処理方法。
続きを表示(約 1,900 文字)
【請求項2】
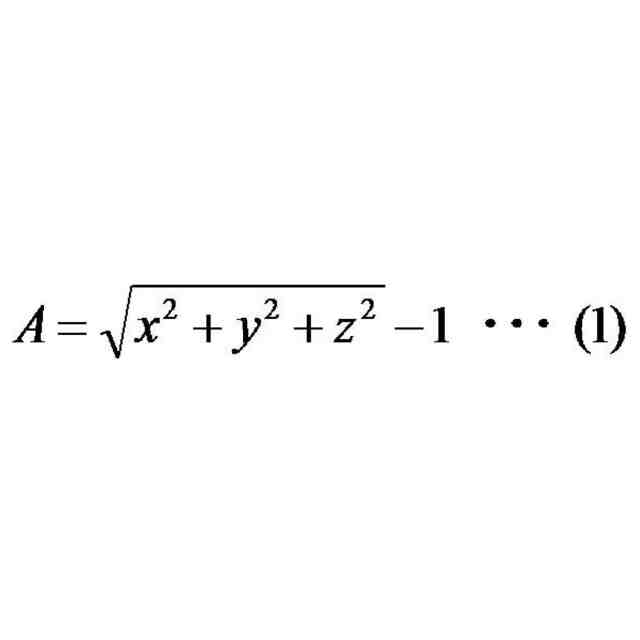
前記取得される加速度の値は、互いに交わるX軸、Y軸、およびZ軸それぞれの方向の加速度x、y、およびzのベクトル和の大きさに対応する、請求項1に記載の生体信号処理方法。
【請求項3】
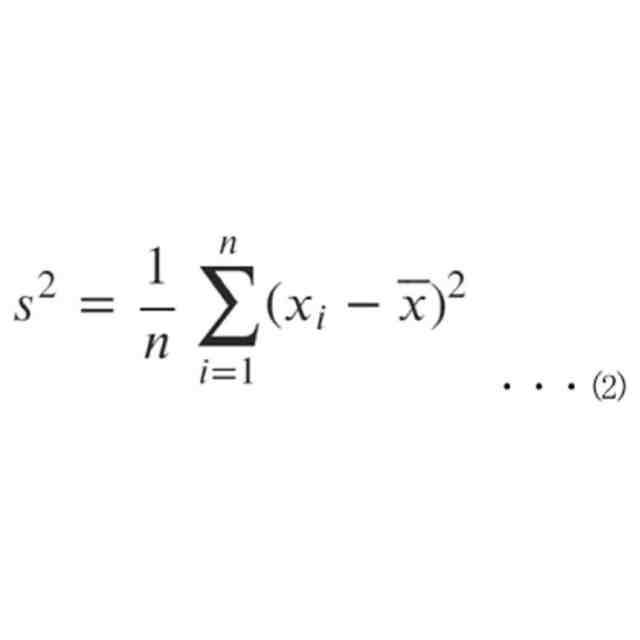
前記加速度の値のばらつきの度合いを示す値は、標準偏差、変動係数、および分散のいずれかである、請求項1に記載の生体信号処理方法。
【請求項4】
前記第1の時間期間は、前記ばらつきの度合いを示す値が前記第1の閾値以下となる時点から第1の時間経過した時点以降に開始される時間期間である、請求項1に記載の生体信号処理方法。
【請求項5】
前記第1の時間期間より後の、前記ばらつきの度合いを示す値が第2の閾値以下の第2の時間期間を特定することをさらに含み、
前記出力は、前記生体信号のうちの前記第2の時間期間における生体信号にさらに基づいて行われる、
請求項1に記載の生体信号処理方法。
【請求項6】
前記第1の時間期間は、前記ばらつきの度合いを示す値が前記第1の閾値以下となる時点から第1の時間経過した時点以降に開始される時間期間であり、
前記第2の時間期間は、前記ばらつきの度合いを示す値が前記第2の閾値以下となる時点から第2の時間経過した時点以降に開始される時間期間である、
請求項5に記載の四肢動物の生体信号処理方法。
【請求項7】
請求項5に記載の生体信号処理方法であって、
前記生体信号が、拍動を示す信号を含み、
前記第1の時間期間における生体信号と、前記第2の時間期間における生体信号との各々について、拍動間隔の平均値、単位時間当たりの拍数、拍動間隔のばらつき、単位時間当たりの拍数のばらつき、HF、およびLF/HFのうちの少なくとも一つを算出し、下記式(c1)~式(c6)のうち少なくとも一つの式の大小関係が満足されるか否かを判定することをさらに含み、
前記出力は、下記式(c1)~式(c6)のうち少なくとも一つの式の大小関係が満足されると判定された場合に行われる、
生体信号処理方法。
前記第1の時間期間における拍動間隔の平均値>前記第2の時間期間における拍動間隔の平均値・・・(c1)
前記第1の時間期間での単位時間当たりの拍数<前記第2の時間期間での単位時間当たりの拍数・・・(c2)
前記第1の時間期間における拍動間隔のばらつき>前記第2の時間期間における拍動間隔のばらつき・・・(c3)
第1の時間期間での単位時間当たりの拍数のばらつき>第2の時間期間での単位時間当たりの拍数のばらつき・・・(c4)
前記第1の時間期間のHF>前記第2の時間期間のHF・・・(c5)
前記第1の時間期間のLF/HF<前記第2の時間期間のLF/HF・・・(c6)
但し、LFは、拍動間隔を周波数スペクトル変換することにより取得されるパワースペクトルを周波数L
f1
からL
f2
まで定積分した値であり、HFは、前記パワースペクトルを周波数H
f1
からH
f2
まで定積分した値であり、H
f1
>L
f1
、H
f2
>L
f2
である。
【請求項8】
前記拍動間隔の平均値は、心電信号において隣り合うR波とR波との間隔であるRRIの平均値である、請求項7に記載の生体信号処理方法。
【請求項9】
前記拍動間隔のばらつきは、SDNN、RMSSD、CVRR、NN50、およびpNN50のいずれかであり、
SDNNは、心電信号において隣り合うR波とR波との間隔であるRRIの標準偏差であり、
RMSSDは、連続して隣接するRRIの差の2乗の平均値の平方根であり、
CVRRは、SDNNの値をRRIの平均値で割って100を掛けた値であり、
NN50は、連続した隣接するRRIの差が50msを超える総数を示す値であり、
pNN50は、連続した隣接するRRIの差が50msを超える心拍の割合を示す値である、
請求項7に記載の生体信号処理方法。
【請求項10】
前記生体信号の取得は生体信号計測用衣類を用いて行われる、請求項1から9のいずれかに記載の生体信号処理方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、四肢動物の生体信号処理方法、生体信号処理装置、生体信号処理システム、プログラム、および記憶媒体に関する。
続きを表示(約 4,500 文字)
【背景技術】
【0002】
近年、動物の生体信号を測定するための技術が注目されている。例えば特許文献1では、分娩を監視すべき動物母体の心拍数を心拍計により測定し、測定された心拍数に基づいて、分娩以前の平時での該心拍数の変動域を超えた一過性の心拍数の減少を弁別して分娩直前信号を通知する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第4487075号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、生理反応として、心拍数は動作が少ないと少なくなり、動作が多くなると多くなる。したがって、監視のために心拍数を用いる場合、動物の動作を考慮しなければ誤った通知が行われてしまう。さらに、動物が立位である場合には、臥位である場合と比較して当該動物の心拍数が増加する。他の生体信号においても、動物の動作および姿勢の影響は同様に見られるものと考えられる。そこで、本発明は、四肢動物の動きに伴う加速度から、当該四肢動物が臥位であると推測される時間期間を特定し、当該時間期間における生体信号の処理を行うことを可能とする、四肢動物の生体信号処理方法、生体信号処理装置、生体信号処理システム、プログラム、および記憶媒体を提供することを目的とする。
【課題を解決するための手段】
【0005】
すなわち本発明は、以下の発明を含み得る。
[1] コンピュータおよび記憶媒体を備える装置が実行する四肢動物の生体信号処理方法であって、
四肢動物の生体信号と、前記四肢動物の動きに伴う加速度とを取得することと、
前記加速度の値のばらつきの度合いを示す値が第1の閾値以下の第1の時間期間を特定することと、
前記生体信号のうちの前記第1の時間期間における生体信号に基づいて出力を行うことと
を含む、生体信号処理方法。
[2] 前記取得される加速度の値は、互いに交わるX軸、Y軸、およびZ軸それぞれの方向の加速度x、y、およびzのベクトル和の大きさに対応する、[1]に記載の生体信号処理方法。
[3] 前記加速度の値のばらつきの度合いを示す値は、標準偏差、変動係数、および分散のいずれかである、[1]または[2]に記載の生体信号処理方法。
[4] 前記第1の時間期間は、前記ばらつきの度合いを示す値が前記第1の閾値以下となる時点から第1の時間経過した時点以降に開始される時間期間である、[1]から[3]のいずれかに記載の生体信号処理方法。
[5] 前記第1の時間期間より後の、前記ばらつきの度合いを示す値が第2の閾値以下の第2の時間期間を特定することをさらに含み、
前記出力は、前記生体信号のうちの前記第2の時間期間における生体信号にさらに基づいて行われる、
[1]から[4]のいずれかに記載の生体信号処理方法。
[6] 前記第1の時間期間は、前記ばらつきの度合いを示す値が前記第1の閾値以下となる時点から第1の時間経過した時点以降に開始される時間期間であり、
前記第2の時間期間は、前記ばらつきの度合いを示す値が前記第2の閾値以下となる時点から第2の時間経過した時点以降に開始される時間期間である、
[5]に記載の四肢動物の生体信号処理方法。
[7] [5]または[6]に記載の生体信号処理方法であって、
前記生体信号が、拍動を示す信号を含み、
前記第1の時間期間における生体信号と、前記第2の時間期間における生体信号との各々について、拍動間隔の平均値、単位時間当たりの拍数、拍動間隔のばらつき、単位時間当たりの拍数のばらつき、HF、およびLF/HFのうちの少なくとも一つを算出し、下記式(c1)~式(c6)のうち少なくとも一つの式の大小関係が満足されるか否かを判定することをさらに含み、
前記出力は、下記式(c1)~式(c6)のうち少なくとも一つの式の大小関係が満足されると判定された場合に行われる、
生体信号処理方法。
前記第1の時間期間における拍動間隔の平均値>前記第2の時間期間における拍動間隔の平均値・・・(c1)
前記第1の時間期間での単位時間当たりの拍数<前記第2の時間期間での単位時間当たりの拍数・・・(c2)
前記第1の時間期間における拍動間隔のばらつき>前記第2の時間期間における拍動間隔のばらつき・・・(c3)
第1の時間期間での単位時間当たりの拍数のばらつき>第2の時間期間での単位時間当たりの拍数のばらつき・・・(c4)
前記第1の時間期間のHF>前記第2の時間期間のHF・・・(c5)
前記第1の時間期間のLF/HF<前記第2の時間期間のLF/HF・・・(c6)
但し、LFは、拍動間隔を周波数スペクトル変換することにより取得されるパワースペクトルを周波数L
f1
からL
f2
まで定積分した値であり、HFは、前記パワースペクトルを周波数H
f1
からH
f2
まで定積分した値であり、H
f1
>L
f1
、H
f2
>L
f2
である。
[8] 前記拍動間隔の平均値は、心電信号において隣り合うR波とR波との間隔であるRRIの平均値である、[7]に記載の生体信号処理方法。
[9] 前記拍動間隔のばらつきは、SDNN、RMSSD、CVRR、NN50、およびpNN50のいずれかであり、
SDNNは、心電信号において隣り合うR波とR波との間隔であるRRIの標準偏差であり、
RMSSDは、連続して隣接するRRIの差の2乗の平均値の平方根であり、
CVRRは、SDNNの値をRRIの平均値で割って100を掛けた値であり、
NN50は、連続した隣接するRRIの差が50msを超える総数を示す値であり、
pNN50は、連続した隣接するRRIの差が50msを超える心拍の割合を示す値である、
[7]に記載の生体信号処理方法。
[10] 前記生体信号の取得は生体信号計測用衣類を用いて行われる、[1]から[9]のいずれかに記載の生体信号処理方法。
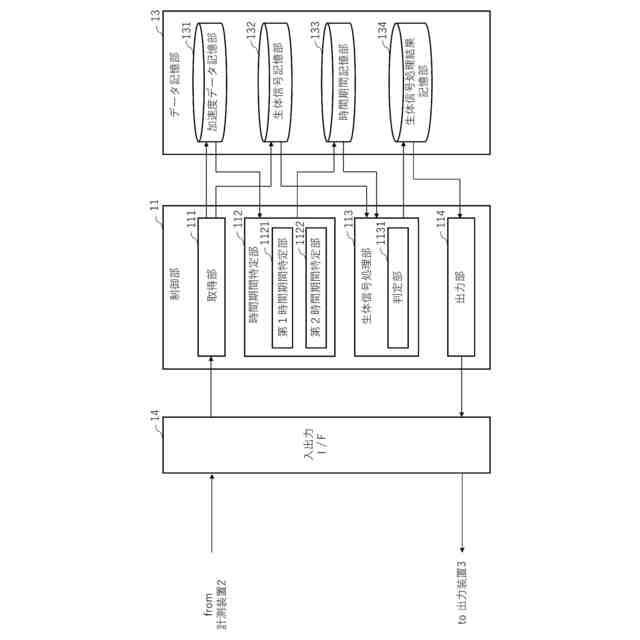
[11] 四肢動物の生体信号と、前記四肢動物の動きに伴う加速度とを取得する取得部と、
前記加速度の値のばらつきの度合いを示す値が第1の閾値以下の第1の時間期間を特定する第1時間期間特定部と、
前記生体信号のうちの前記第1の時間期間における生体信号に基づいて出力を行う出力部と
を備える、四肢動物の生体信号処理装置。
[12] [11]に記載の生体信号処理装置と、
前記生体信号および/または前記加速度の取得に用いられる計測装置、ならびに、前記生体信号処理装置による出力に基づいて出力を行う出力装置、の少なくとも一方と
【発明の効果】
【0006】
本発明によれば、四肢動物の動きに伴う加速度の値のばらつきの度合いを示す値が第1の閾値以下の第1の時間期間が特定され、当該第1の時間期間における生体信号に基づく出力が可能となる。特定される第1の時間期間では、当該四肢動物が臥位であると推測される。このため、四肢動物の動作および姿勢が当該四肢動物の生体信号に影響を及ぼしてしまうような時間期間の生体信号を排除して、当該四肢動物の生体信号に基づく出力を行うことが可能となる。
【図面の簡単な説明】
【0007】
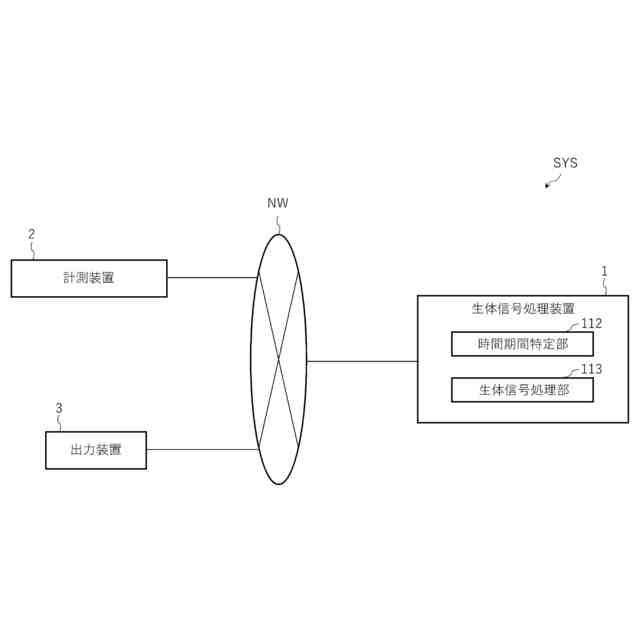
図1は、第1実施形態に係る生体信号処理装置を含む生体信号処理システムの構成の一例を示す。
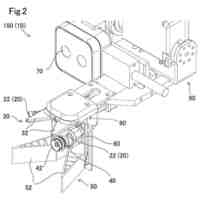
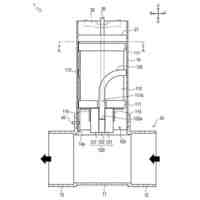
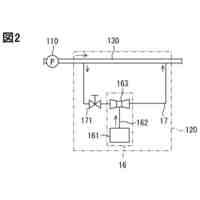
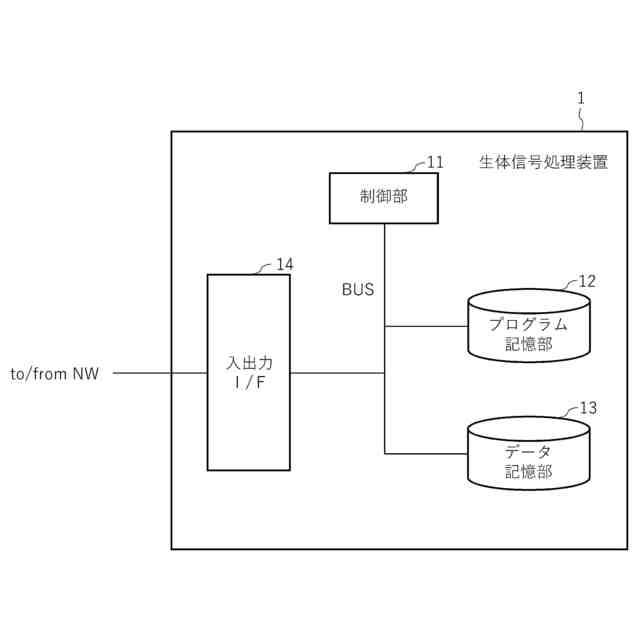
図2は、第1実施形態に係る生体信号処理装置のハードウェア構成の一例を示すブロック図である。
図3は、第1実施形態に係る生体信号処理装置の制御部のソフトウェア構成の一例を示すブロック図である。
図4は、第1実施形態に係る生体信号処理装置により実行される動作の一例のフローチャートを示す。
図5は、第1実施形態に係る生体信号処理装置により実行される時間期間を特定する動作を説明するための例示的なグラフを示す。
図6は、第1実施形態に係る生体信号処理装置により実行される時間期間を特定する動作のより詳細な一例のフローチャートを示す。
図7は、第1実施形態に係る生体信号処理装置により実行される生体信号に基づいて出力を行う動作のより詳細な一例のフローチャートを示す。
図8は、LFおよびHFの算出方法の一例を説明するためのグラフを示す。
図9は、第1実施形態に係る生体信号処理装置により実行される或る条件式が満足されるか否かを判定する動作を説明するための例示的なグラフを示す。
【発明を実施するための形態】
【0008】
以下、図面を参照してこの発明に係る実施形態を説明する。
以下では、下記実施形態に基づき本発明をより具体的に説明するが、本発明はもとより下記実施形態によって制限を受けるものではなく、前・後記の趣旨に適合し得る範囲で適当に変更を加えて実施することも勿論可能であり、それらはいずれも本発明の技術的範囲に包含される。
【0009】
[第1実施形態]
(構成例)
(1)システム構成
図1は、第1実施形態に係る生体信号処理装置1を含む生体信号処理システムSYSの構成の一例を示す。当該システムSYSは、生体信号処理装置1に加えて、例えば、計測装置2および出力装置3を含む。
【0010】
計測装置2は、四肢動物に取り付けられる。計測装置2としては、加速度計に加え、生体信号の検出に用いられる心電計、心拍センサ、脈波センサ、呼吸数計測器、温度センサ、ならびに、電磁誘導、赤外線、または超音波の受信器、発振器等が挙げられる。呼吸数計測器は、例えば、呼吸により周長が変化する部位の長さの変化を検出する変位センサである。変位センサは、例えば、当該長さの変位により変化する抵抗または静電容量を検出するものである。図1では、計測装置2を便宜的に単一のブロックで表しているが、計測装置2として、例えば、加速度計と、上述したような生体信号の検出に用いられる各種機器との組み合わせが用いられる。当該生体信号の検出に用いられる各種機器としては、1種または2種以上が用いられてもよい。当該生体信号の検出に用いられる各種機器は、例えば、検出される電圧信号等の生体信号をアナログデジタル変換し、当該アナログデジタル変換後の信号を、通信ネットワークNWを介して外部装置に送信可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
除草具
16日前
個人
ベアスタンガン
16日前
個人
ペット用玩具
13日前
井関農機株式会社
収穫機
19日前
井関農機株式会社
収穫機
19日前
個人
獣罠捕獲検知システム
16日前
個人
根掛りしないイカ用疑似餌
16日前
タキイ種苗株式会社
レタス植物
6日前
株式会社ロッソ
植物栽培器
2日前
井関農機株式会社
作業車両
19日前
株式会社ロッソ
植物栽培器
2日前
株式会社サクマ
植物収容構造
19日前
株式会社エスク
鳥獣忌避装置
16日前
みのる産業株式会社
移植装置
13日前
株式会社東海化成
ポット保持具
12日前
個人
ルアー
6日前
井関農機株式会社
作業車両
19日前
株式会社タカキタ
収穫機の前処理装置
19日前
個人
四足歩行動物用被服パターンの設計方法
19日前
AGRIST株式会社
収穫装置
9日前
株式会社クボタケミックス
弁装置
13日前
大日本除蟲菊株式会社
薬剤揮散装置
6日前
株式会社シマノ
ルアー
16日前
株式会社ササキコーポレーション
農作業機
13日前
グローブライド株式会社
釣竿ケース
5日前
南京大学
藻類バイオフィルムの高速成膜方法
16日前
株式会社大貴
排泄物処理材及びその製造方法
6日前
株式会社デンソー
潅水システム
12日前
花王株式会社
抗菌剤組成物
12日前
株式会社シマノ
魚挟み具
19日前
株式会社横島精密
太陽熱を活用した暖房システム
12日前
株式会社シマノ
魚挟み具
19日前
個人
海ぶどうの養殖方法及び海ぶどうの養殖装置
16日前
三州産業株式会社
蒸熱処理方法および蒸熱処理装置
16日前
井関農機株式会社
作業車両
12日前
ヤンマーホールディングス株式会社
苗移植機
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ