TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024164453
公報種別
公開特許公報(A)
公開日
2024-11-27
出願番号
2023079931
出願日
2023-05-15
発明の名称
コンプライアンスユニット
出願人
SMC株式会社
代理人
弁理士法人桐朋
主分類
B25J
17/02 20060101AFI20241120BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【解決手段】コンプライアンスユニット10は、XY平面に沿って広がるベース板14と、XY平面に沿ってベース板に対して移動可能に配置されたテーブルユニット16と、ベース板およびテーブルユニットに対してX方向およびY方向に移動可能なようにベース板とテーブルユニットとの間に介在されたコンプライアンス機構18と、ベース板の外側から内側に向かってテーブルユニットおよびコンプライアンス機構を押圧することにより、テーブルユニットとコンプライアンス機構とをベース板に対する原点位置に復帰させる原点復帰機構20と、を備える。
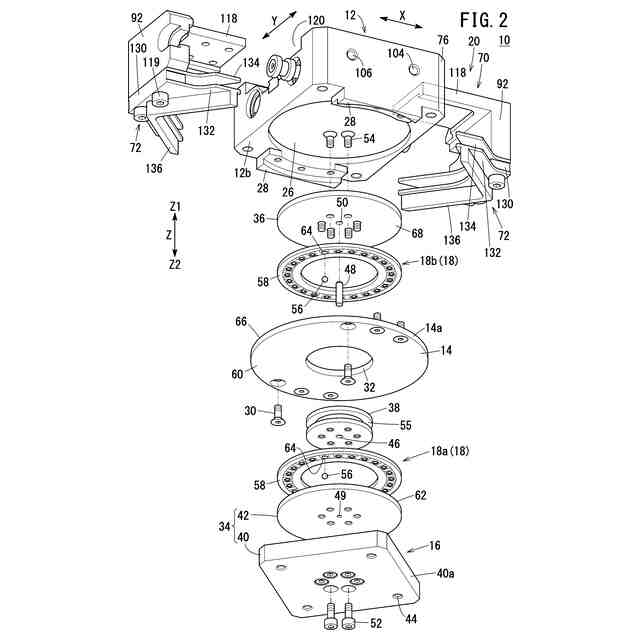
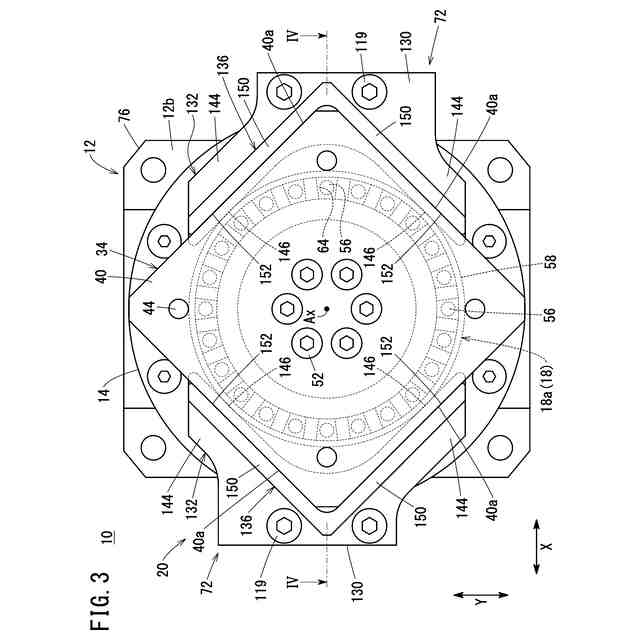
【選択図】図2
特許請求の範囲
【請求項1】
XY平面に沿って広がるベース板と、
前記XY平面に沿って前記ベース板に対して移動可能に配置されたテーブルユニットと、
前記ベース板および前記テーブルユニットに対してX方向およびY方向に移動可能なように前記ベース板と前記テーブルユニットとの間に介在されたコンプライアンス機構と、
前記ベース板の平面方向の外側から内側に向かって前記テーブルユニットおよび前記コンプライアンス機構を押圧することにより、前記テーブルユニットと前記コンプライアンス機構とを前記ベース板に対する原点位置に復帰させる原点復帰機構と、
を備える、コンプライアンスユニット。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載のコンプライアンスユニットであって、
前記原点復帰機構は、前記テーブルユニットと前記コンプライアンス機構とを前記原点位置に保持する、コンプライアンスユニット。
【請求項3】
請求項2に記載のコンプライアンスユニットであって、
前記ベース板が取り付けられたボディを備え、
前記原点復帰機構は、
前記テーブルユニットと前記コンプライアンス機構とを挟持するための一対の把持部と、
前記一対の把持部を開閉させるための駆動機構と、
を有し、
前記駆動機構は、前記ボディに設けられている、コンプライアンスユニット。
【請求項4】
請求項3に記載のコンプライアンスユニットであって、
前記原点復帰機構は、前記テーブルユニットと前記コンプライアンス機構とを前記原点位置に復帰させた時に前記ベース板に接触する、コンプライアンスユニット。
【請求項5】
請求項1に記載のコンプライアンスユニットであって、
前記コンプライアンス機構は、
複数のボールと、
前記複数のボールを転動可能に支持する板状のリテーナと、
を有し、
前記原点復帰機構は、前記リテーナの外周面を押圧する、コンプライアンスユニット。
【請求項6】
請求項1~5のいずれか1項に記載のコンプライアンスユニットであって、
前記ベース板の中央部には、貫通孔が形成され、
前記テーブルユニットは、
テーブル本体と、
前記ベース板に対して前記テーブル本体とは反対側に位置する保持板と、
前記貫通孔に挿通された状態で前記テーブル本体と前記保持板とを互いに連結する連結部と、
を有し、
前記コンプライアンス機構は、前記ベース板と前記テーブル本体との間と前記ベース板と前記保持板との間との少なくともいずれかに介在されている、コンプライアンスユニット。
【請求項7】
請求項6に記載のコンプライアンスユニットであって、
前記コンプライアンス機構は、前記ベース板と前記テーブル本体との間と前記ベース板と前記保持板との間との両方に介在されている、コンプライアンスユニット。
【請求項8】
請求項6に記載のコンプライアンスユニットであって、
前記連結部の外周面には、前記テーブルユニットが前記ベース板に対して前記原点位置から移動した際に前記ベース板の内周端部が挿入可能な環状溝が形成されている、コンプライアンスユニット。
【請求項9】
請求項3に記載のコンプライアンスユニットであって、
前記ベース板は、円形状の外周面を有し、
前記原点復帰機構は、前記ベース板の前記外周面に接触するベース接触部を有し、
前記ベース接触部は、前記ベース板の前記外周面に沿って湾曲した凹状湾曲面であり、
前記凹状湾曲面の曲率半径は、前記ベース板の半径よりも大きい、コンプライアンスユニット。
【請求項10】
請求項3に記載のコンプライアンスユニットであって、
前記ベース板は、円形状の外周面を有し、
前記原点復帰機構は、前記ベース板の前記外周面に接触するベース接触部を有し、
前記ベース接触部は、平面である、コンプライアンスユニット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、コンプライアンスユニットに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
例えば、特許文献1には、XY平面に沿って広がるベース板と、テーブルユニットと、コンプライアンス機構とを備えたコンプライアンスユニットが開示されている。テーブルユニットは、ベース板に対してXY平面に沿って移動可能に設けられている。コンプライアンス機構は、ベース板とテーブルユニットとの間に介在されている。コンプライアンス機構は、多数の鋼球を転動可能に支持する板状のリテーナを有する。リテーナには、コンプライアンス機構をベース板に対する原点位置に復帰させるためのコイルスプリングが取り付けられている。
【先行技術文献】
【特許文献】
【0003】
特開2001-129784号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
より良好なコンプライアンスユニットを提供することが望まれている。
【0005】
本発明は、上述した課題を解決することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様は、XY平面に沿って広がるベース板と、前記XY平面に沿って前記ベース板に対して移動可能に配置されたテーブルユニットと、前記ベース板および前記テーブルユニットに対してX方向およびY方向に移動可能なように前記ベース板と前記テーブルユニットとの間に介在されたコンプライアンス機構と、前記ベース板の平面方向の外側から内側に向かって前記テーブルユニットおよび前記コンプライアンス機構を押圧することにより、前記テーブルユニットと前記コンプライアンス機構とを前記ベース板に対する原点位置に復帰させる原点復帰機構と、を備える、コンプライアンスユニットである。
【発明の効果】
【0007】
本発明によれば、より良好なコンプライアンスユニットを提供し得る。
【図面の簡単な説明】
【0008】
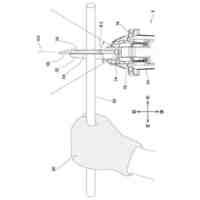
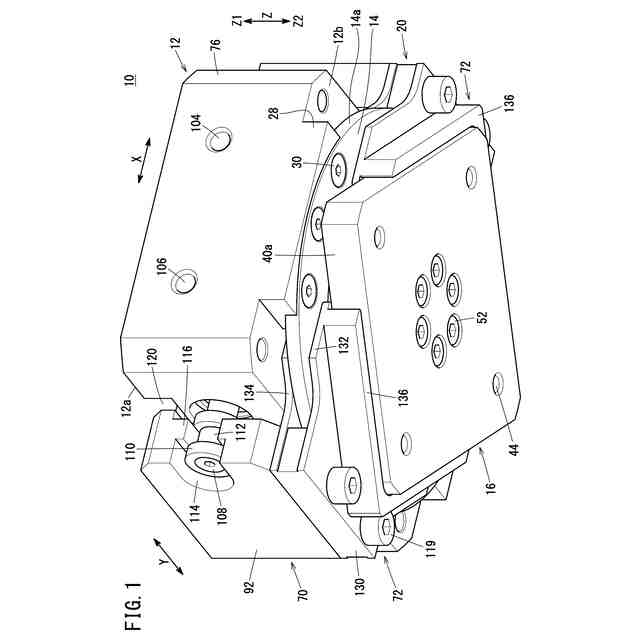
図1は、本発明の一実施形態に係るコンプライアンスユニットの斜視図である。
図2は、コンプライアンスユニットの分解斜視図である。
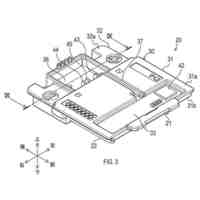
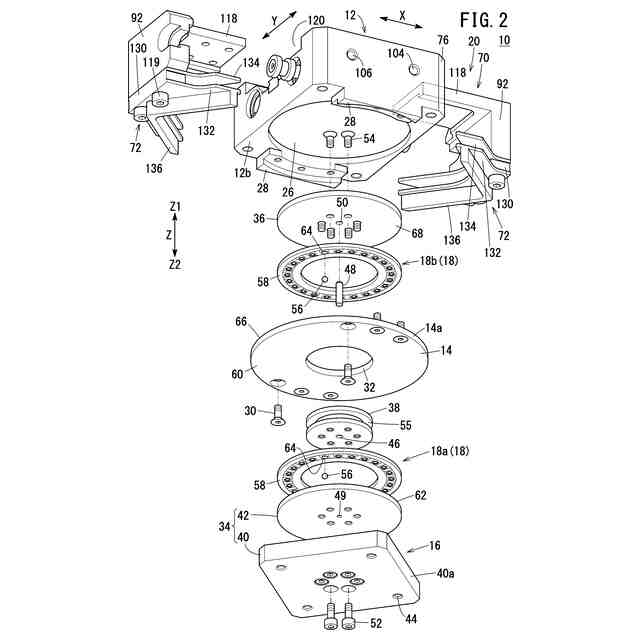
図3は、コンプライアンスユニットの底面図である。
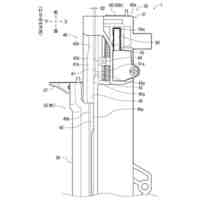
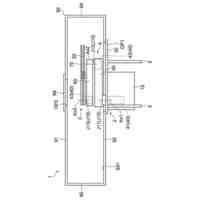
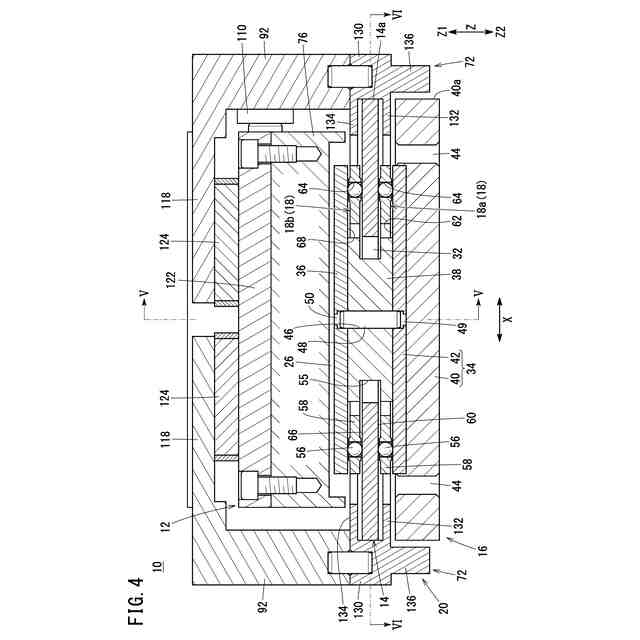
図4は、図3のIV-IV線に沿った断面図である。
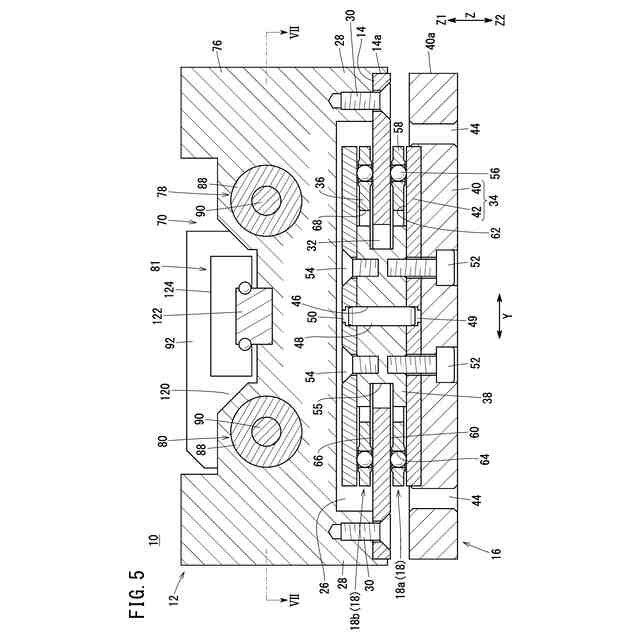
図5は、図4のV-V線に沿った縦断面図である。
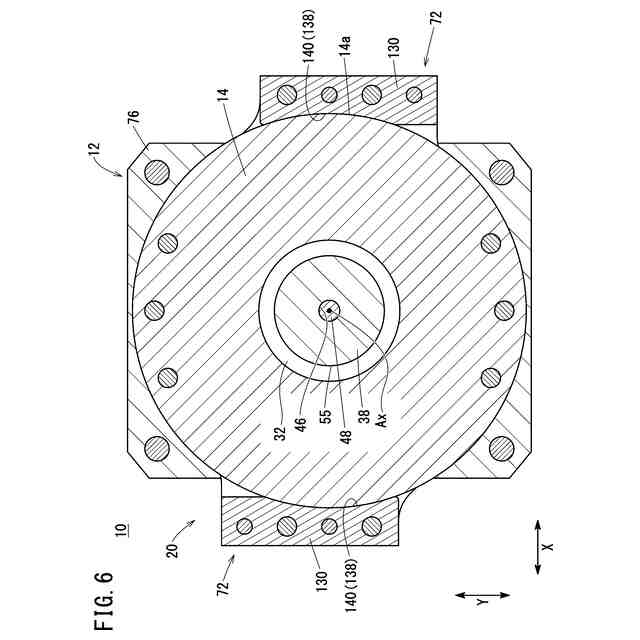
図6は、図4のVI-VI線に沿った縦断面図である。
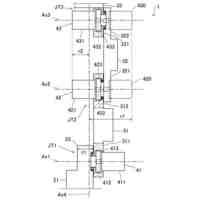
図7は、図5のVII-VII線に沿った断面図である。
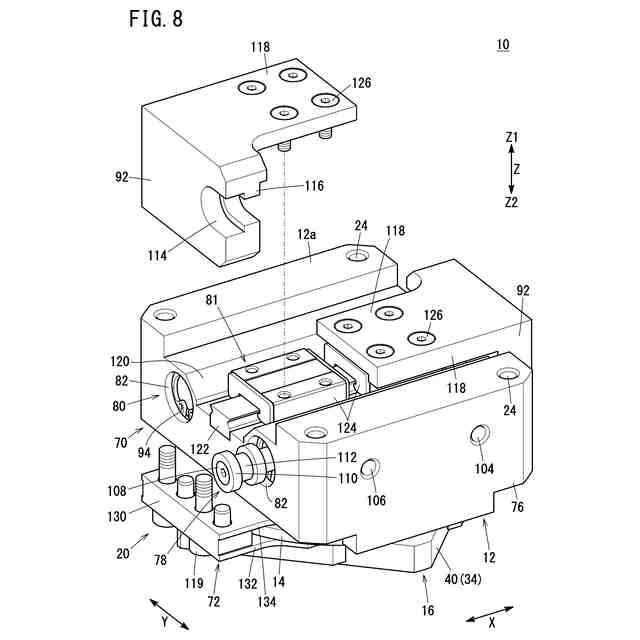
図8は、コンプライアンスユニットの一部分解斜視図である。
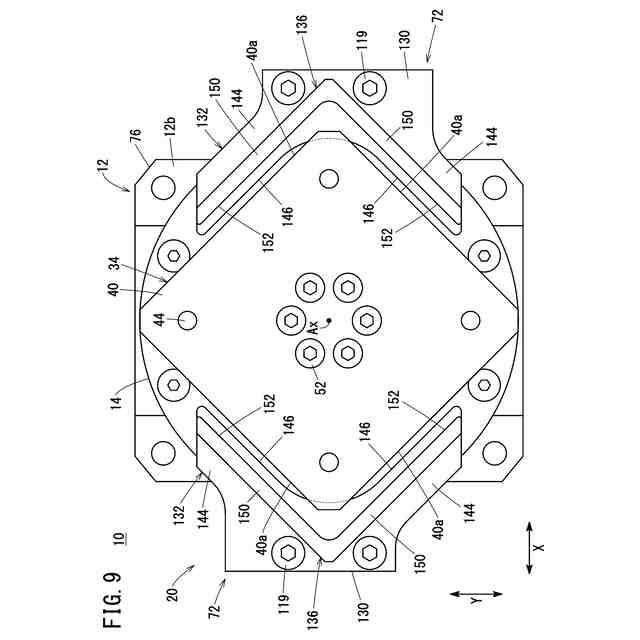
図9は、非ロック状態のコンプライアンスユニットを示す説明図である。
図10は、非ロック状態のコンプライアンスユニットを示す説明図である。
【発明を実施するための形態】
【0009】
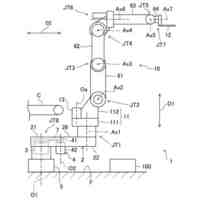
本発明の一実施形態に係るコンプライアンスユニット10について図面を用いて以下に説明する。本実施形態に係るコンプライアンスユニット10は、例えば、ワークの組付時の位置ずれ(芯ずれ)を補正するための装置である。具体的には、図1に示すように、コンプライアンスユニット10では、例えば、図示しないロボットハンドがボディ12に接続され、ワークを把持するための図示しないチャック装置がテーブルユニット16に取り付けられる。テーブルユニット16は、ロックされていない状態(非ロック状態)でボディ12に対してXY平面に沿って移動可能である(図9参照)。
【0010】
このようなコンプライアンスユニット10は、例えば、所定の孔にワークを挿入するワークの組付時に芯ずれが発生した場合であっても、当該ワークが当該孔の内面に当たることによってテーブルユニット16が容易に移動するため、芯ずれを簡単に補正し得る。なお、コンプライアンスユニット10の用途は、ワークを孔に挿入する例に限定されない。以下、コンプライアンスユニット10の構成について詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
11日前
株式会社マキタ
電動工具
4日前
株式会社マキタ
電動工具
19日前
川崎重工業株式会社
ロボットリスト
19日前
川崎重工業株式会社
ロボットアーム
19日前
川崎重工業株式会社
ロボットアーム
19日前
日本車輌製造株式会社
締め付け工具
19日前
日本信号株式会社
作業機制御システム
4日前
CKD株式会社
吸着型搬送装置
1か月前
川崎重工業株式会社
ロボットシステム
19日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
ジヤトコ株式会社
圧入装置
1か月前
株式会社京阪エンジニアリング
脱着装置
5日前
株式会社スター精機
ワーク搬送装置
8日前
株式会社マキタ
集塵アタッチメント
4日前
モトコマ株式会社
寄せポンチホルダー
20日前
川崎重工業株式会社
ロボットシステム
11日前
トヨタ自動車株式会社
制御装置及び制御方法
19日前
個人
ターンバックル用工具
26日前
株式会社DailyColor
ロボットハンド
20日前
有限会社松尾エンジニアリング
連結部材
20日前
株式会社SHIN‐JIGEN
上肢アシスト装置
25日前
株式会社マキタ
電動工具
11日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
バッテリ駆動式機器
1か月前
株式会社マキタ
打ち込み工具
1か月前
馳逸自動化科技(蘇州)有限公司
物品ピッキングロボット
1か月前
株式会社安川電機
ロボット及び基板搬送装置
1か月前
株式会社日本マイクロニクス
把持機構及び搬送装置
1か月前
川崎重工業株式会社
多関節ロボット
4日前
川崎重工業株式会社
多関節ロボット
4日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
8日前
ファナック株式会社
人間の技術に基づく経路生成
26日前
株式会社不二越
オフラインダイレクトティーチング装置
26日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ