TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024159212
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023075057
出願日
2023-04-28
発明の名称
ロータリエンコーダの異常検出方法及びロータリエンコーダ
出願人
富士電機株式会社
代理人
個人
,
個人
主分類
G01D
5/244 20060101AFI20241031BHJP(測定;試験)
要約
【課題】位置検出の異常を検出するロータリエンコーダの異常検出方法及びロータリエンコーダを提供する。
【解決手段】回転軸とともに回転し、アブソリュートパターン及びインクリメンタルパターンを有する円板と、前記回転軸とともに回転する磁石と、前記インクリメンタルパターンを検出して前記回転軸の相対位置を示す信号を出力し、前記アブソリュートパターンを検出して前記回転軸の絶対位置を示す信号を出力する光センサと、前記磁石の磁界の向きを示す信号を出力する磁気センサと、を備え、前記回転軸の回転を検出するロータリエンコーダの異常検出方法であって、初期一回転位置及び前記光センサから出力された前記回転軸の絶対位置を示す信号に基づいて算出された一回転位置と、前記磁気センサから出力された前記磁石の磁界の向きを示す信号と、に基づいて、前記ロータリエンコーダの異常を検出する、ロータリエンコーダの異常検出方法。
【選択図】図5
特許請求の範囲
【請求項1】
回転軸とともに回転し、アブソリュートパターン及びインクリメンタルパターンを有する円板と、
前記回転軸とともに回転する磁石と、
前記インクリメンタルパターンを検出して前記回転軸の相対位置を示す信号を出力し、前記アブソリュートパターンを検出して前記回転軸の絶対位置を示す信号を出力する光センサと、
前記磁石の磁界の向きを示す信号を出力する磁気センサと、を備え、
前記回転軸の回転を検出するロータリエンコーダの異常検出方法であって、
初期一回転位置及び前記光センサから出力された前記回転軸の絶対位置を示す信号に基づいて算出された一回転位置と、前記磁気センサから出力された前記磁石の磁界の向きを示す信号と、に基づいて、前記ロータリエンコーダの異常を検出する、
ロータリエンコーダの異常検出方法。
続きを表示(約 1,300 文字)
【請求項2】
前記回転軸の前記相対位置を示す信号に基づいて、前記回転軸の回転速度を検出し、
前記回転軸の回転速度が閾値よりも高速で回転する場合、
初期一回転位置及び前記光センサから出力された前記回転軸の絶対位置を示す信号に基づいて算出された一回転位置と、前記磁気センサから出力された前記磁石の磁界の向きを示す信号と、に基づいて、前記ロータリエンコーダの異常を検出する、
請求項1に記載のロータリエンコーダの異常検出方法。
【請求項3】
前記磁気センサから出力された前記磁石の磁界の向きが切り替わる際、前記一回転位置が所定の範囲内であるか否かを判定し、
所定の範囲外である場合、前記ロータリエンコーダの異常と判定する、
請求項1または請求項2に記載のロータリエンコーダの異常検出方法。
【請求項4】
オフセット値を格納する不揮発メモリを備え、
前記回転軸の回転速度が閾値よりも高速で回転する場合、
前記一回転位置を前記オフセット値で補正した補正後一回転位置と、前記磁気センサから出力された前記磁石の磁界の向きを示す信号と、に基づいて、前記ロータリエンコーダの異常を検出する、
請求項1または請求項2に記載のロータリエンコーダの異常検出方法。
【請求項5】
前記回転軸の回転速度が閾値よりも低速で回転する場合、
初期一回転位置及び前記光センサから出力された前記回転軸の絶対位置を示す信号に基づいて算出された一回転位置と、前記光センサから出力された前記回転軸の絶対位置を示す信号と、に基づいて、前記ロータリエンコーダの異常を検出する、
請求項1または請求項2に記載のロータリエンコーダの異常検出方法。
【請求項6】
前記回転軸の回転速度が閾値よりも低速で回転する場合、
初期一回転位置及び前記光センサから出力された前記回転軸の絶対位置を示す信号に基づいて算出された一回転位置と、前記磁気センサから出力された前記磁石の磁界の向きを示す信号と、に基づいて、前記ロータリエンコーダの異常を検出する、
請求項1または請求項2に記載のロータリエンコーダの異常検出方法。
【請求項7】
回転軸とともに回転し、アブソリュートパターン及びインクリメンタルパターンを有する円板と、
前記回転軸とともに回転する磁石と、
前記インクリメンタルパターンを検出して前記回転軸の相対位置を示す信号を出力し、前記アブソリュートパターンを検出して前記回転軸の絶対位置を示す信号を出力する光センサと、
前記磁石の磁界の向きを示す信号を出力する磁気センサと、
制御部と、を備え、
前記制御部は、
初期一回転位置及び前記光センサから出力された前記回転軸の絶対位置を示す信号に基づいて算出された一回転位置と、前記磁気センサから出力された前記磁石の磁界の向きを示す信号と、に基づいて、異常を検出する異常検出部と、を有する、
ロータリエンコーダ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロータリエンコーダに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、エンコーダの回転体1回転で1周期となるような2値乱数信号(以下、M系列信号という)を出力するM系列信号出力手段と、エンコーダの回転体1回転で任意の分解能の数だけ出力され、かつ、デューティが50%のAパルス信号およびこのAパルス信号に対し1周期の1/4だけずれたBパルス信号を出力するパルス信号出力手段と、前記M系列信号を位置データに変換する変換手段と、前記Aパルス信号およびBパルス信号を計数する計数手段とを備え、電源投入時に前記変換手段を用いて初期位置検出を行ない、その後、この初期位置検出値に前記計数手段からの出力を加算することにより、位置検出を常時可能にしたエンコーダにおいて、1回転で1パルスだけ同じ位置で発生するZパルス信号を出力するZパルス信号出力手段と、このZパルス信号から位置を検出する位置検出手段とを設け、エンコーダの回転体が停止時を含む低速で回転中の場合は、前記M系列信号を用いて初期位置検出を行ない、エンコーダの回転体が高速で回転中の場合は、前記Zパルス信号を用いて初期位置検出を行なうことを特徴とするエンコーダの初期位置検出装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第3680983号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に開示されたエンコーダにおいて、回転角度の高分解能を実現する場合、M系列信号1個あたりの受光素子の面積が小さくなる。このため、回路の浮遊容量(寄生容量)等の影響によって、受光素子で検出した信号に遅れが生じるおそれがある。よって、高速回転時の回転角度の検出が困難であり、高速回転時の位置ずれの異常を検出できないおそれがある。
【0005】
そこで、上記課題に鑑み、位置検出の異常を好適に検出するロータリエンコーダの異常検出方法及びロータリエンコーダを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の一実施形態では、回転軸とともに回転し、アブソリュートパターン及びインクリメンタルパターンを有する円板と、前記回転軸とともに回転する磁石と、前記インクリメンタルパターンを検出して前記回転軸の相対位置を示す信号を出力し、前記アブソリュートパターンを検出して前記回転軸の絶対位置を示す信号を出力する光センサと、前記磁石の磁界の向きを示す信号を出力する磁気センサと、を備え、前記回転軸の回転を検出するロータリエンコーダの異常検出方法であって、初期一回転位置及び前記光センサから出力された前記回転軸の絶対位置を示す信号に基づいて算出された一回転位置と、前記磁気センサから出力された前記磁石の磁界の向きを示す信号と、に基づいて、前記ロータリエンコーダの異常を検出する、ロータリエンコーダの異常検出方法が提供される。
【発明の効果】
【0007】
上述の実施形態によれば、位置検出の異常を好適に検出するロータリエンコーダの異常検出方法及びロータリエンコーダを提供することができる。
【図面の簡単な説明】
【0008】
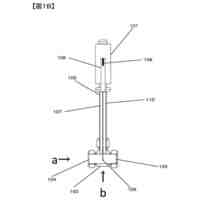
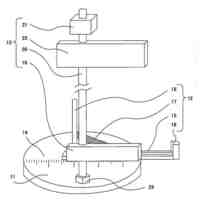
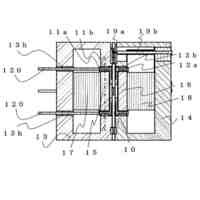
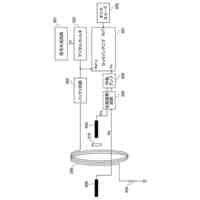
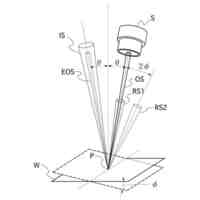
ロータリエンコーダの断面図である。
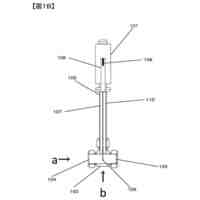
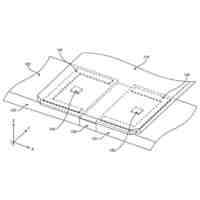
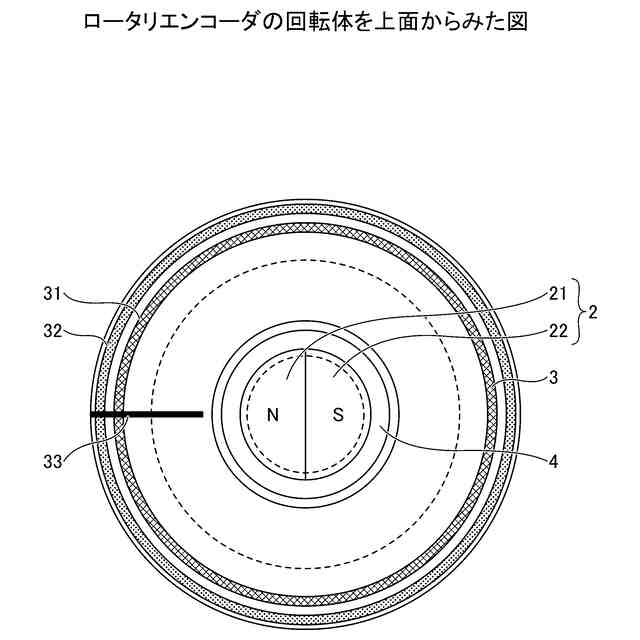
ロータリエンコーダの回転体を上面からみた図である。
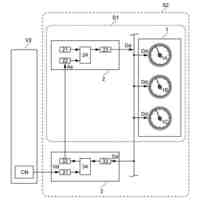
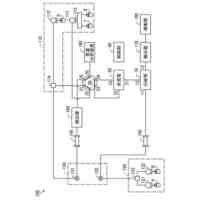
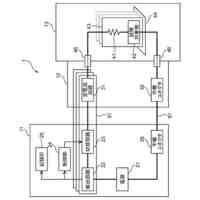
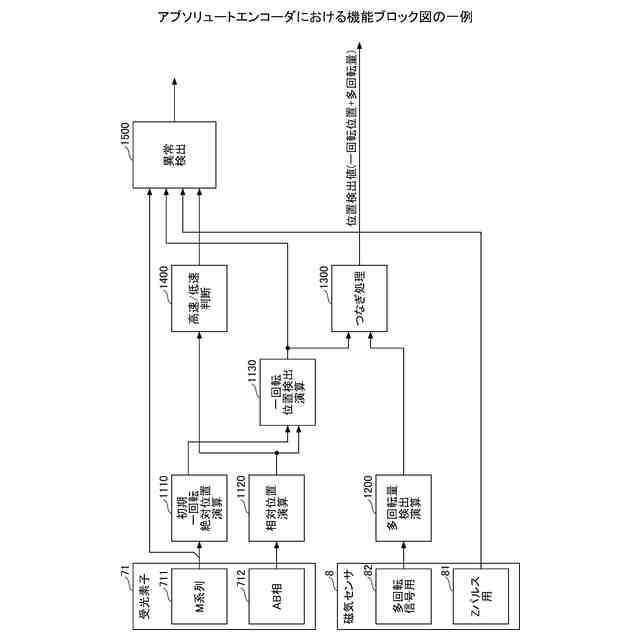
アブソリュートエンコーダにおける機能ブロック図の一例である。
インクリメンタルエンコーダにおける機能ブロック図の一例である。
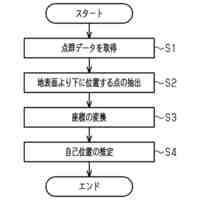
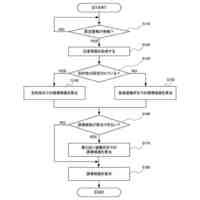
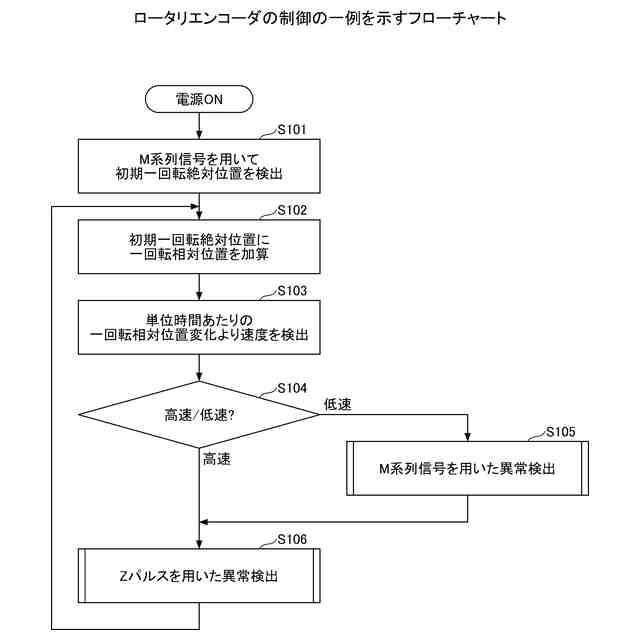
ロータリエンコーダの制御の一例を示すフローチャートである。
異常検出部の機能ブロック図の一例である。
一回転位置検出値及びZパルスの一例を示すグラフである。
異常検出部の機能ブロック図の他の一例である。
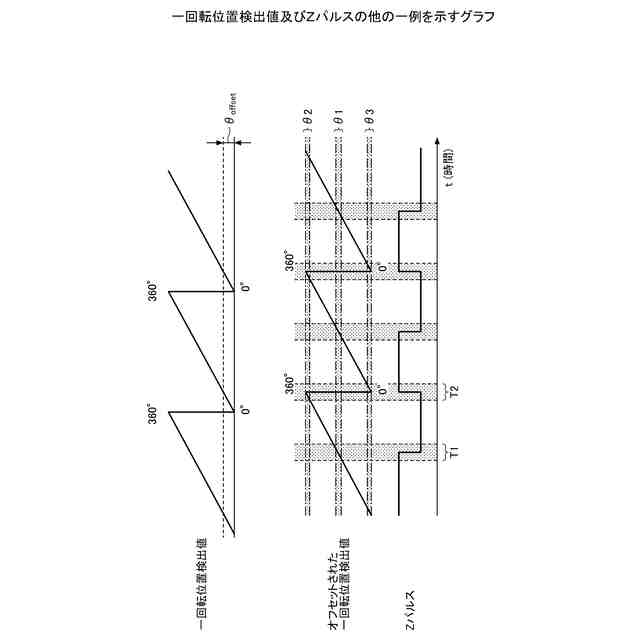
一回転位置検出値及びZパルスの他の一例を示すグラフである。
【発明を実施するための形態】
【0009】
以下、図面を参照して本開示を実施するための形態について説明する。各図面において、同一構成部分には同一符号を付し、重複した説明を省略する場合がある。
【0010】
ロータリエンコーダについて、図1及び図2を用いて説明する。図1は、ロータリエンコーダの断面図である。図2は、ロータリエンコーダの回転体を上面からみた図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社高橋型精
採尿具
16日前
スガ試験機株式会社
環境試験機
18日前
株式会社アトラス
計量容器
29日前
株式会社チノー
気体流量調整機構
1か月前
株式会社トプコン
測量装置
1か月前
株式会社トプコン
測量装置
22日前
株式会社チノー
気体流量調整機構
1か月前
中国電力株式会社
短絡防止具
8日前
アルファクス株式会社
積層プローブ
8日前
日本精機株式会社
補助計器システム
10日前
株式会社関電工
内径測定装置。
16日前
株式会社トプコン
測量システム
23日前
キヤノン電子株式会社
サーボ加速度計
8日前
積水樹脂株式会社
建築物用浸水測定装置
22日前
日本特殊陶業株式会社
ガスセンサ
18日前
倉敷紡績株式会社
フィルム測定装置
16日前
トヨタ自動車株式会社
校正システム
23日前
上海海事大学
河川水位監視システム
1か月前
個人
レーザ距離計の計測用フォルダ
1か月前
ミツミ電機株式会社
流体センサ
16日前
株式会社XMAT
測定装置および方法
16日前
三菱電機株式会社
絶縁検査装置
22日前
TDK株式会社
磁気検出システム
1か月前
矢崎総業株式会社
電流センサ
18日前
豊田合成株式会社
センサの冷却構造
1か月前
株式会社豊田自動織機
物体検出装置
2日前
株式会社島津製作所
分析装置
22日前
株式会社SUBARU
ナビゲーション装置
22日前
住友金属鉱山株式会社
金属異物の評価方法
8日前
矢崎総業株式会社
電流センサ
18日前
エスペック株式会社
高電圧試験装置
8日前
マシンビジョンライティング株式会社
撮像レンズ
1か月前
株式会社デンソー
温度推定装置
8日前
横河電機株式会社
ガス測定装置
8日前
上野精機株式会社
位置検出装置
2日前
株式会社バンザイ
車両用速度計試験機
8日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ