TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024160519
公報種別
公開特許公報(A)
公開日
2024-11-14
出願番号
2023075613
出願日
2023-05-01
発明の名称
物体検出装置
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
G01S
7/497 20060101AFI20241107BHJP(測定;試験)
要約
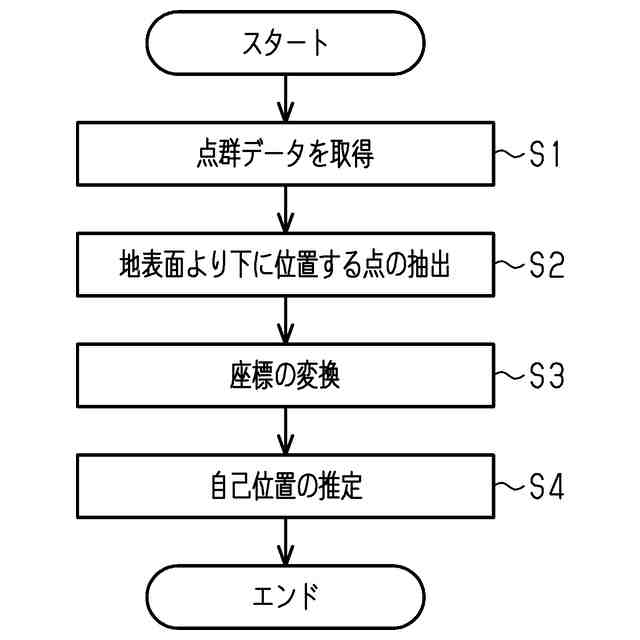
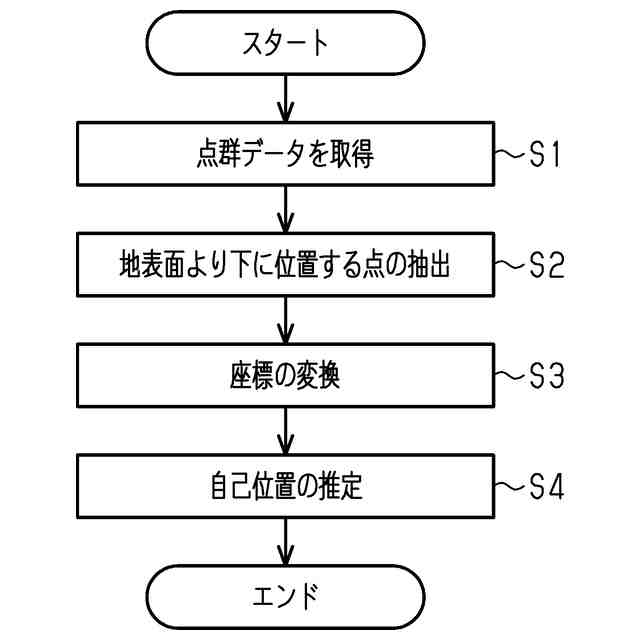
【課題】点群データに含まれる点の数が減少することを抑制すること。
【解決手段】物体検出装置は、鉛直方向に対する照射角度を変更しながらレーザ光を照射してレーザ光が当たった点までの距離を測定するレーザ距離計と、レーザ距離計から点の集合である点群データを取得する制御装置と、を備える。制御装置は、点の位置を表す座標系において地表面よりも下に位置する点を点群データから抽出する。制御装置は、地表面よりも下に位置する点の座標を、地表面に対して面対称となる位置の座標に変換する。
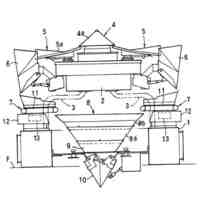
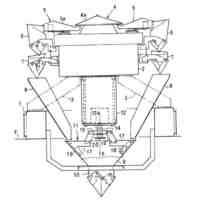
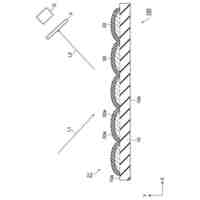
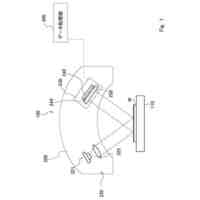
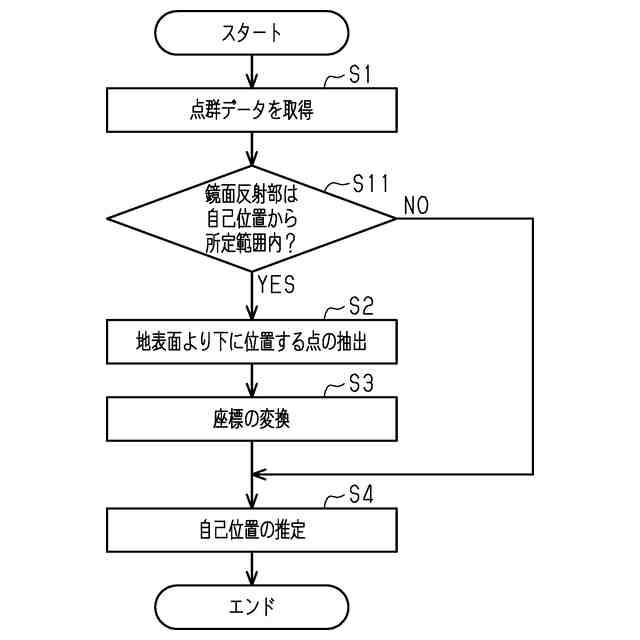
【選択図】図3
特許請求の範囲
【請求項1】
移動体が備える物体検出装置であって、
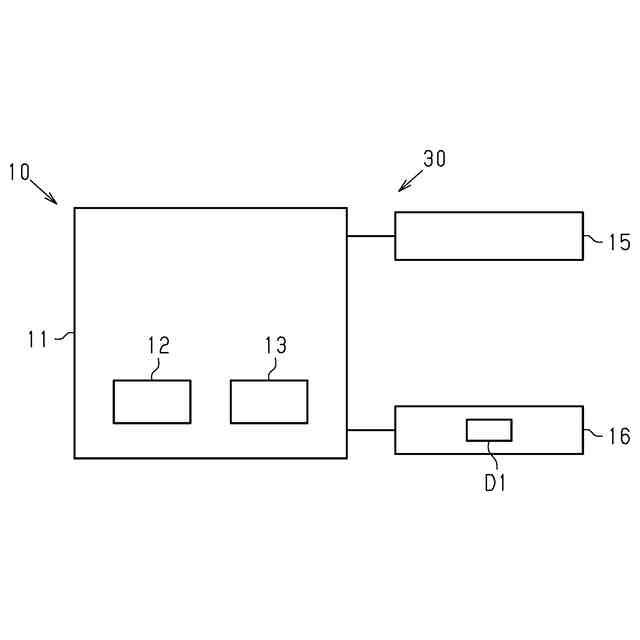
鉛直方向に対する照射角度を変更しながらレーザ光を照射して前記レーザ光が当たった点までの距離を測定するレーザ距離計と、
前記レーザ距離計から前記点の集合である点群データを取得する制御装置と、を備え、
前記制御装置は、
前記点の位置を表す座標系において地表面よりも下に位置する前記点を前記点群データから抽出し、
前記地表面よりも下に位置する前記点の座標を、前記地表面に対して面対称となる位置の座標に変換する、物体検出装置。
続きを表示(約 460 文字)
【請求項2】
前記制御装置は、前記地表面から前記レーザ距離計までの高さから、前記地表面よりも下に位置する前記点を前記点群データから抽出する、請求項1に記載の物体検出装置。
【請求項3】
前記移動体が用いられる環境を示す地図データを記憶した記憶装置を備え、
前記制御装置は、
前記移動体の自己位置を推定し、
前記地図データから、前記地表面よりも下に位置する前記点を前記点群データから抽出する、請求項1に記載の物体検出装置。
【請求項4】
前記移動体が用いられる環境を示す地図データを記憶した記憶装置を備え、
前記地図データは、前記レーザ光を鏡面反射させる鏡面反射部の位置情報を含み、
前記制御装置は、
前記移動体の自己位置を推定し、
前記鏡面反射部が前記自己位置から所定範囲に存在している場合、前記地表面よりも下に位置する前記点の座標を、前記地表面に対して面対称となる位置の座標に変換する、請求項1又は請求項2に記載の物体検出装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、物体検出装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
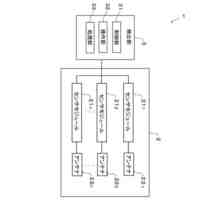
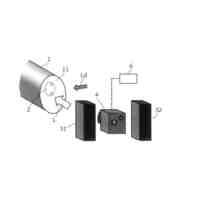
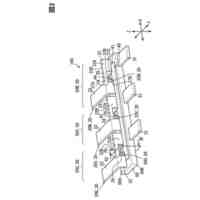
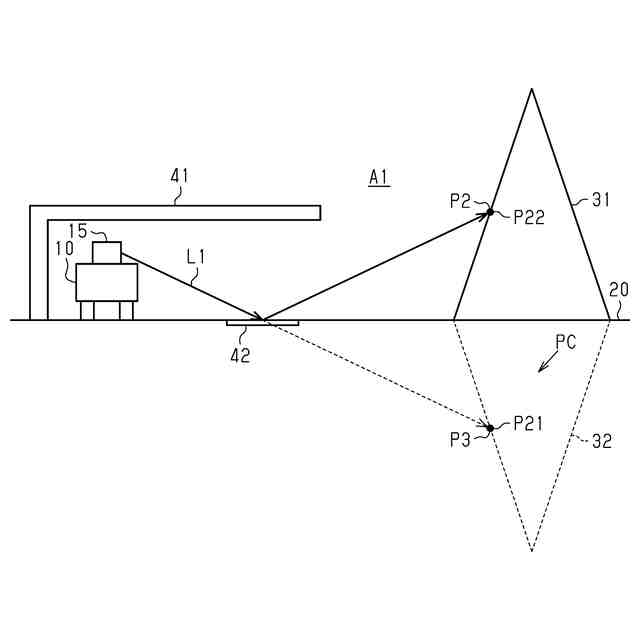
物体検出装置は、レーザ距離計と、制御装置と、を備える。レーザ距離計は、所定の照射角度毎にレーザ光を照射する。レーザ距離計から照射されたレーザ光が物体に当たると、レーザ光は反射する。レーザ距離計は、物体で反射したレーザを受光すると、レーザ光の照射からレーザ光の受光までに要した時間からレーザ光が当たった箇所までの距離を算出する。制御装置は、レーザ光から点群データを取得する。点群データは、レーザ光が当たった箇所の位置を点で表したデータである。制御装置は、点群データから物体に関する情報を認識する。物体に関する情報は、例えば、物体までの距離、又は物体の形状である。
【0003】
レーザ光が水面に入射するなどして鏡面反射が生じると、鏡面反射したレーザ光が物体で反射した後にレーザ距離計に受光される。このため、鏡面反射が生じた場合、鏡面反射が生じていない場合に比べてレーザ光の照射からレーザ光の受光までの時間が長くなる。この場合、制御装置が物体に関する情報を正しく認識できないおそれがある。
【0004】
特許文献1に開示の物体検出装置は、レーザ距離計の検出結果から自己位置の推定を行う。物体検出装置は、点群データから鏡面反射したレーザ光によって得られた点を除去する。これにより、鏡面反射したレーザ光によって得られた点によって自己位置の推定精度が低下することを抑制している。
【先行技術文献】
【特許文献】
【0005】
特開2022-129058号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1では、鏡面反射したレーザ光によって得られた点は除去される。このため、点群データに含まれる点の数が減少する。これにより、物体に関する情報を正しく認識できないおそれがある。
【課題を解決するための手段】
【0007】
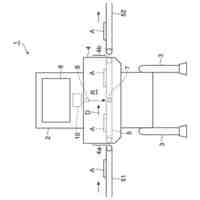
上記課題を解決する物体検出装置は、移動体が備える物体検出装置であって、鉛直方向に対する照射角度を変更しながらレーザ光を照射して前記レーザ光が当たった点までの距離を測定するレーザ距離計と、前記レーザ距離計から前記点の集合である点群データを取得する制御装置と、を備え、前記制御装置は、前記点の位置を表す座標系において地表面よりも下に位置する前記点を前記点群データから抽出し、前記地表面よりも下に位置する前記点の座標を、前記地表面に対して面対称となる位置の座標に変換する。
【0008】
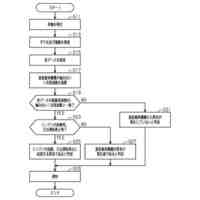
レーザ距離計よりも下方にレーザ光を照射した場合であって当該レーザ光が鏡面反射した場合に得られる点は、地表面よりも下の座標を示す。このため、点の位置を表す座標系において地表面よりも下に位置する点を点群データから抽出すると、鏡面反射したレーザ光によって得られた点を抽出できる。制御装置は、地表面よりも下に位置する点の座標を、地表面に対して面対称となる位置の座標に変換する。この変換により得られた座標は、鏡面反射したレーザ光が物体に当たった箇所の位置を示す。点群データに含まれる点の座標を変換することによって、点群データから点を除去する場合に比べて、点群データに含まれる点の数が減少することが抑制される。
【0009】
上記物体検出装置について、前記制御装置は、前記地表面から前記レーザ距離計までの高さから、前記地表面よりも下に位置する前記点を前記点群データから抽出してもよい。
上記物体検出装置について、前記移動体が用いられる環境を示す地図データを記憶した記憶装置を備え、前記制御装置は、前記移動体の自己位置を推定し、前記地図データから、前記地表面よりも下に位置する前記点を前記点群データから抽出してもよい。
【0010】
上記物体検出装置について、前記移動体が用いられる環境を示す地図データを記憶した記憶装置を備え、前記地図データは、前記レーザ光を鏡面反射させる鏡面反射部の位置情報を含み、前記制御装置は、前記移動体の自己位置を推定し、前記鏡面反射部が前記自己位置から所定範囲に存在している場合、前記地表面よりも下に位置する前記点の座標を、前記地表面に対して面対称となる位置の座標に変換してもよい。
【発明の効果】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
液面検出装置
1日前
大和製衡株式会社
組合せ秤
1日前
大和製衡株式会社
組合せ秤
7日前
有限会社原製作所
検出回路
21日前
大和製衡株式会社
組合せ秤
1日前
日本無線株式会社
レーダ装置
22日前
個人
フロートレス液面センサー
14日前
株式会社リコー
光学機器
21日前
日本特殊陶業株式会社
ガスセンサ
2日前
日本特殊陶業株式会社
ガスセンサ
2日前
キヤノン株式会社
放射線撮像装置
16日前
日本特殊陶業株式会社
ガスセンサ
13日前
ダイハツ工業株式会社
試験用治具
7日前
大和製衡株式会社
組合せ計量装置
23日前
株式会社クボタ
作業車
6日前
大同特殊鋼株式会社
座標系較正方法
16日前
TDK株式会社
計測装置
今日
株式会社フジキン
流量測定装置
8日前
旭光電機株式会社
漏出検出装置
13日前
トヨタ自動車株式会社
歯車の検査方法
2日前
大同特殊鋼株式会社
ラベル色特定方法
16日前
住友化学株式会社
積層基板
13日前
株式会社アステックス
ラック型負荷装置
14日前
大和ハウス工業株式会社
計測用治具
13日前
SMC株式会社
位置検出センサ
6日前
株式会社ミツトヨ
非接触表面性状評価装置
15日前
日本製鉄株式会社
評価方法
14日前
パイオニア株式会社
評価装置
6日前
株式会社デンソー
電流センサ
13日前
株式会社イシダ
X線検査装置
20日前
トヨタ自動車株式会社
異音判定装置
15日前
株式会社日本マイクロニクス
プローブ
8日前
日新電機株式会社
検電デバイス
6日前
富士電機株式会社
診断装置、診断方法
2日前
住友重機械工業株式会社
異常検知装置
1日前
トヨタ自動車株式会社
方法
2日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ